摘要:
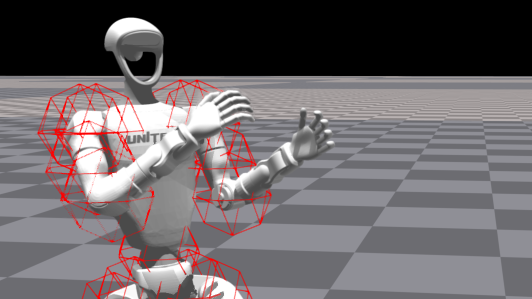
1. 前言 主要记录关于RGB2SMPL算法工程HybrIK的安装记录。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.0 torch_tricks model.train()的作用是启用 Batch Norma 阅读全文
posted @ 2025-03-03 19:50
泪水下的笑靥
阅读(167)
评论(0)
推荐(0)
 0. 前言 这篇博客主要用于过程记录H2O代码部分的参数解读部分。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! [NOTE]:这篇博客笔者也有疏忽的地方,仅供参考!!!! 1. 论文&项目 项目地址:https://omni. 阅读全文
0. 前言 这篇博客主要用于过程记录H2O代码部分的参数解读部分。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! [NOTE]:这篇博客笔者也有疏忽的地方,仅供参考!!!! 1. 论文&项目 项目地址:https://omni. 阅读全文
 1. 前言 这篇博客主要用于简要记录包括人形机器人WBC或locomotion相关论文小结。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! PS:主要是备忘,不然看过就忘了。。。(汗 2. 正文 先看数据集或者说动捕数据: 2. 阅读全文
1. 前言 这篇博客主要用于简要记录包括人形机器人WBC或locomotion相关论文小结。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! PS:主要是备忘,不然看过就忘了。。。(汗 2. 正文 先看数据集或者说动捕数据: 2. 阅读全文
 0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处, 阅读全文
0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处, 阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号