【Urdf-Viz】好用的urdf visual工具!
1. 前言
这篇博客主要用于记录如何安装urdf-viz。这个工具主要用于URDF文件的显示,比直接看URDF文件更加直接便捷!
一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。
如有不对之处,欢迎评论区指出错误,你我共同进步学习!
2. 正文
2.1 基础环境安装
可以通过以下命令快速安装Rust(如果你尚未安装)
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh
也可参考官网的安装方式:https://www.rust-lang.org/tools/install
2.2 Urdf-viz安装
项目链接:https://github.com/openrr/urdf-viz
打开终端安装,或者直接在github下载项目:
git clone https://github.com/OTL/urdf-viz.git
进入项目目录并使用Cargo安装URDF-Viz。如果你想让URDF-Viz支持除了 .obj, .stl, 和 .dae 以外的其他类型的模型文件,需添加 --features assimp 参数。
cd urdf-viz
cargo install --path . [--features assimp]
2.3 使用
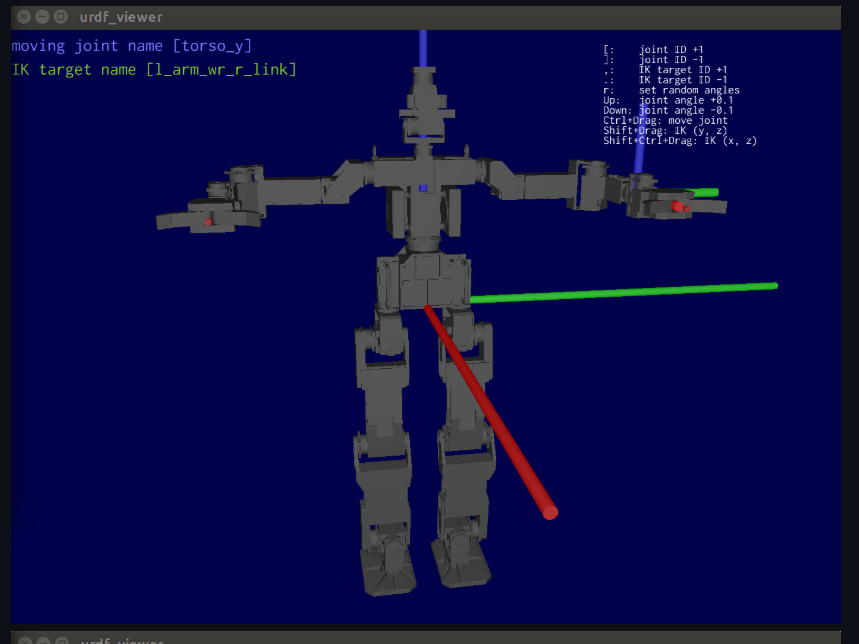
基本使用:安装完成后,在终端输入以下命令来查看URDF文件,假设你的URDF文件名为robot.urdf。一般我们都用这个:
urdf-viz robot.urdf
使用XACRO文件:如果您的模型定义在XACRO文件中,可以直接调用并且传递参数,如:
urdf-viz robot.xacro.urdf xacro --xacro-args joint1=value1 joint2=value2
可选配置:若URDF文件中的
source ~/catkin_ws/devel/setup.bash
3. 后记
这篇博客暂时记录到这里,日后我会继续补充。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号