摘要:
问题1: virtual bool finalize() 中 virtual 的作用是干什么? 用户问的是C++中的virtual关键字在virtual bool finalize()中的作用。首先,我需要回忆一下C++中虚函数的基本概念。virtual关键字用于实现多态,允许子类重写父类的函数。 阅读全文
posted @ 2025-04-28 15:57
Zenith_Hugh
阅读(24)
评论(0)
推荐(0)
摘要:
1. 下载源码 git clone https://github.com/sweeneychris/TheiaSfM.git 2. 环境搭建、编译和测试 在 map2dfusion 的容器中 # 安装依赖 apt-get install librocksdb-dev rapidjson-dev mk 阅读全文
posted @ 2025-04-28 11:37
Zenith_Hugh
阅读(34)
评论(0)
推荐(0)
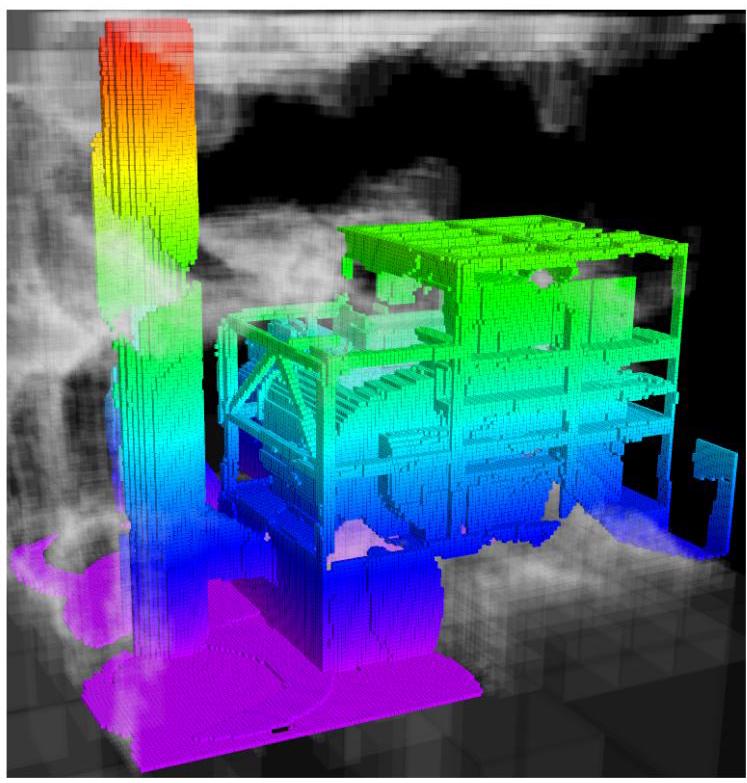 - 在本文中,我们提出了对八叉树地图(OctoMap)的扩展,称之为 UFOMap。
- UFOMap 对地图中的三种状态(即占用、空闲和未知)进行显式表示。令人惊讶的是,这使得表示方式在内存使用上更加高效。
- 此外,我们提供了一些方法,能够显著加快向八叉树中插入数据的速度。这使得高分辨率(低于 $1\mathrm{\;{cm}}$)的实时彩色体素建图成为可能。
- UFOMap 以 C++ 库的形式提供,既可以独立使用,也可以集成到机器人操作系统(ROS)中。
- 在本文中,我们提出了对八叉树地图(OctoMap)的扩展,称之为 UFOMap。
- UFOMap 对地图中的三种状态(即占用、空闲和未知)进行显式表示。令人惊讶的是,这使得表示方式在内存使用上更加高效。
- 此外,我们提供了一些方法,能够显著加快向八叉树中插入数据的速度。这使得高分辨率(低于 $1\mathrm{\;{cm}}$)的实时彩色体素建图成为可能。
- UFOMap 以 C++ 库的形式提供,既可以独立使用,也可以集成到机器人操作系统(ROS)中。 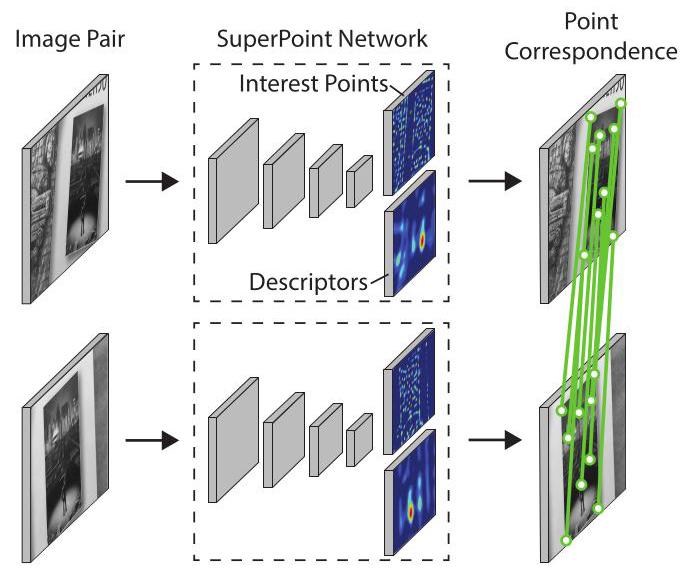 提出了一种全卷积神经网络架构,用于兴趣点检测和描述,该架构使用一种名为单应性自适应(Homographic Adaptation)的自监督域自适应框架进行训练。我们的实验表明:(1)可以将知识从合成数据集迁移到真实世界的图像上;(2)稀疏兴趣点检测和描述可以作为一个高效的卷积神经网络来实现;(3)由此产生的系统在诸如单应性估计等几何计算机视觉匹配任务中表现良好。
提出了一种全卷积神经网络架构,用于兴趣点检测和描述,该架构使用一种名为单应性自适应(Homographic Adaptation)的自监督域自适应框架进行训练。我们的实验表明:(1)可以将知识从合成数据集迁移到真实世界的图像上;(2)稀疏兴趣点检测和描述可以作为一个高效的卷积神经网络来实现;(3)由此产生的系统在诸如单应性估计等几何计算机视觉匹配任务中表现良好。 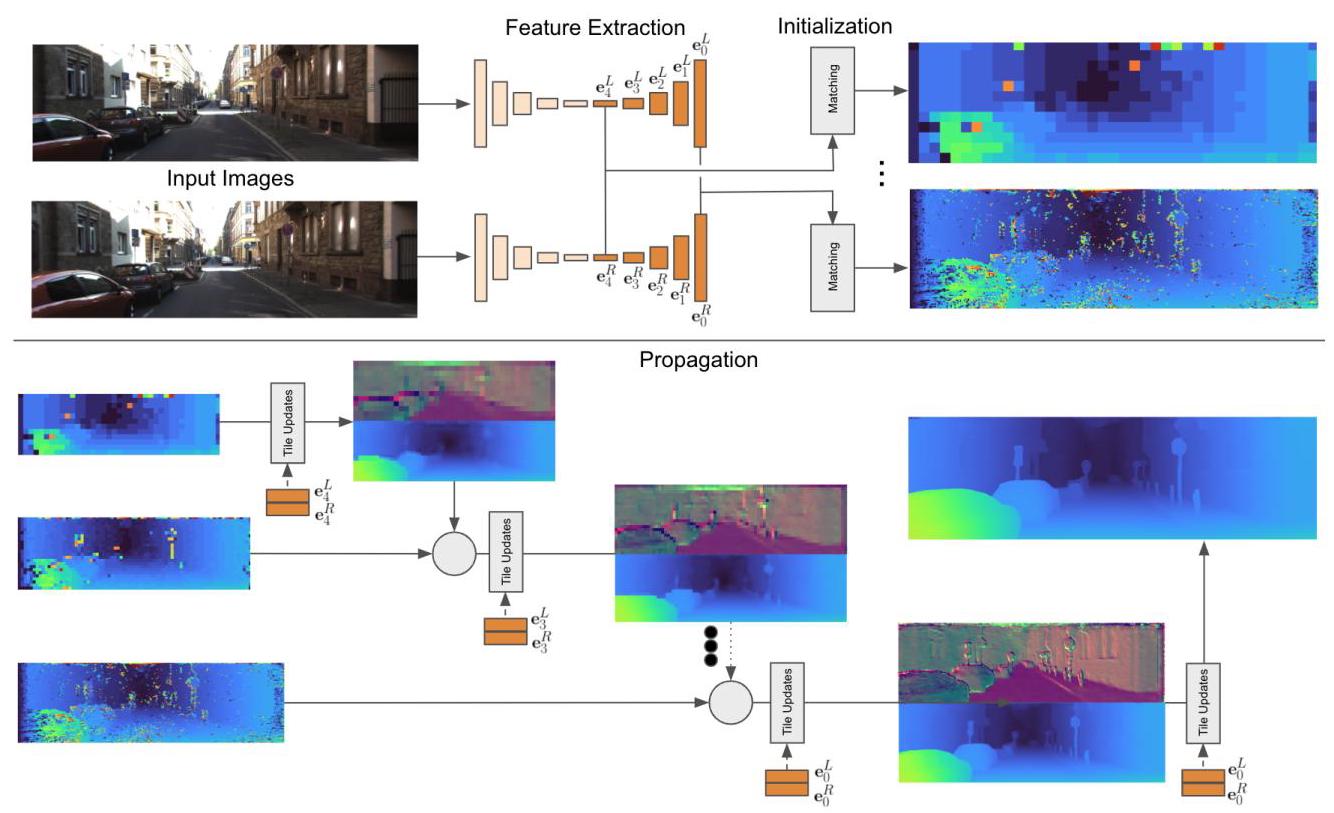 本文提出了HITNet,一种用于实时立体匹配的新型神经网络架构。与许多近期在全代价体上运行并依赖${3D}$卷积的神经网络方法不同,我们的方法并不显式构建代价体,而是依靠快速多分辨率初始化步骤、可微的${2D}$几何传播和变形机制来推断视差假设。为了达到较高的精度,我们的网络不仅从几何角度推理视差,还推断倾斜平面假设,从而能够更准确地执行几何变形和上采样操作。我们的架构本质上是多分辨率的,允许信息在不同层次之间传播。多项实验证明,与最先进的方法相比,所提出的方法在所需计算量大幅减少的情况下仍具有有效性。
本文提出了HITNet,一种用于实时立体匹配的新型神经网络架构。与许多近期在全代价体上运行并依赖${3D}$卷积的神经网络方法不同,我们的方法并不显式构建代价体,而是依靠快速多分辨率初始化步骤、可微的${2D}$几何传播和变形机制来推断视差假设。为了达到较高的精度,我们的网络不仅从几何角度推理视差,还推断倾斜平面假设,从而能够更准确地执行几何变形和上采样操作。我们的架构本质上是多分辨率的,允许信息在不同层次之间传播。多项实验证明,与最先进的方法相比,所提出的方法在所需计算量大幅减少的情况下仍具有有效性。 ![[论文阅读]A_Real-Time_Incremental_Video_Mosaic_Framework_for_UAVRemote_Sensing](https://img2024.cnblogs.com/blog/1564596/202504/1564596-20250401090742111-170757542.png) Article 文章 A Real-Time Incremental Video Mosaic Framework for UAV Remote Sensing 一种用于无人机遥感的实时增量视频拼接框架 Ronghao Li \({}^{1}\) , Pengqi Gao \({}^{2}\) ,
Article 文章 A Real-Time Incremental Video Mosaic Framework for UAV Remote Sensing 一种用于无人机遥感的实时增量视频拼接框架 Ronghao Li \({}^{1}\) , Pengqi Gao \({}^{2}\) , 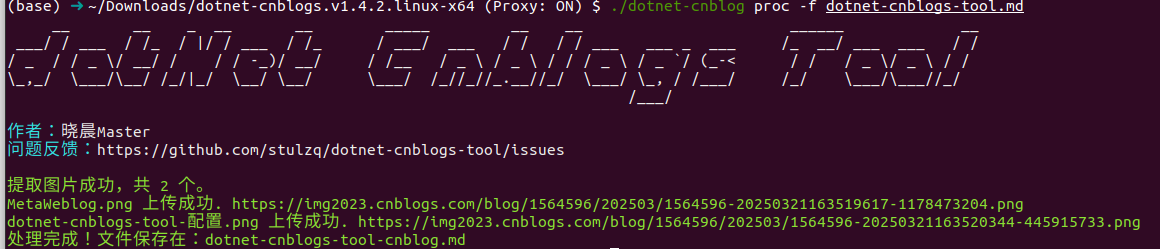 1. 解决的问题: 在本地编辑 md 后,如果有图像,直接复制该 md 到 博客园,或者使用 vscode 插件,会自动上传到博客园,但是上传后,因为没有真正上传图片,图片会无法显示。 2. 解决方法: 参考: dotnet-cnblogs-tool 本文环境为 linux 环境。 直接下载 dot
1. 解决的问题: 在本地编辑 md 后,如果有图像,直接复制该 md 到 博客园,或者使用 vscode 插件,会自动上传到博客园,但是上传后,因为没有真正上传图片,图片会无法显示。 2. 解决方法: 参考: dotnet-cnblogs-tool 本文环境为 linux 环境。 直接下载 dot  浙公网安备 33010602011771号
浙公网安备 33010602011771号