摘要:
教程 古月居:7ROS理论与实践_.Moveit!机械臂控制_视频_哔哩哔哩_bilibili 对应源码:Whiffe/arm-of-robot-using-Moveit-in-ros-gazebo-rviz (github.com) 问题 ImportError: cannot import na 阅读全文
posted @ 2022-10-01 18:42
Yo然儿
阅读(833)
评论(0)
推荐(0)
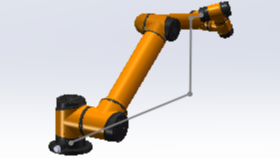 建立模型,确认关节 六自由度的机械臂应该有六处可旋转的关节,这就意味着在绑定约束的时候需要提供六个自由度,需要找出这六个关节,典型六自由度关节如图示。 添加关节约束 需要添加的是6个角度限制约束,建议为面与面之间的转角限制,以基座为例,找到两个可以描述转动关系的面: 这里展示一下我建好的6个转角约束 阅读全文
建立模型,确认关节 六自由度的机械臂应该有六处可旋转的关节,这就意味着在绑定约束的时候需要提供六个自由度,需要找出这六个关节,典型六自由度关节如图示。 添加关节约束 需要添加的是6个角度限制约束,建议为面与面之间的转角限制,以基座为例,找到两个可以描述转动关系的面: 这里展示一下我建好的6个转角约束 阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号