使用Solidworks制作六轴机械臂动画
建立模型,确认关节
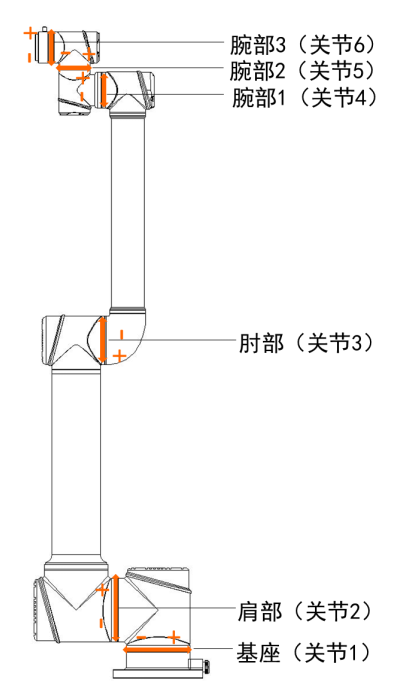
六自由度的机械臂应该有六处可旋转的关节,这就意味着在绑定约束的时候需要提供六个自由度,需要找出这六个关节,典型六自由度关节如图示。
添加关节约束
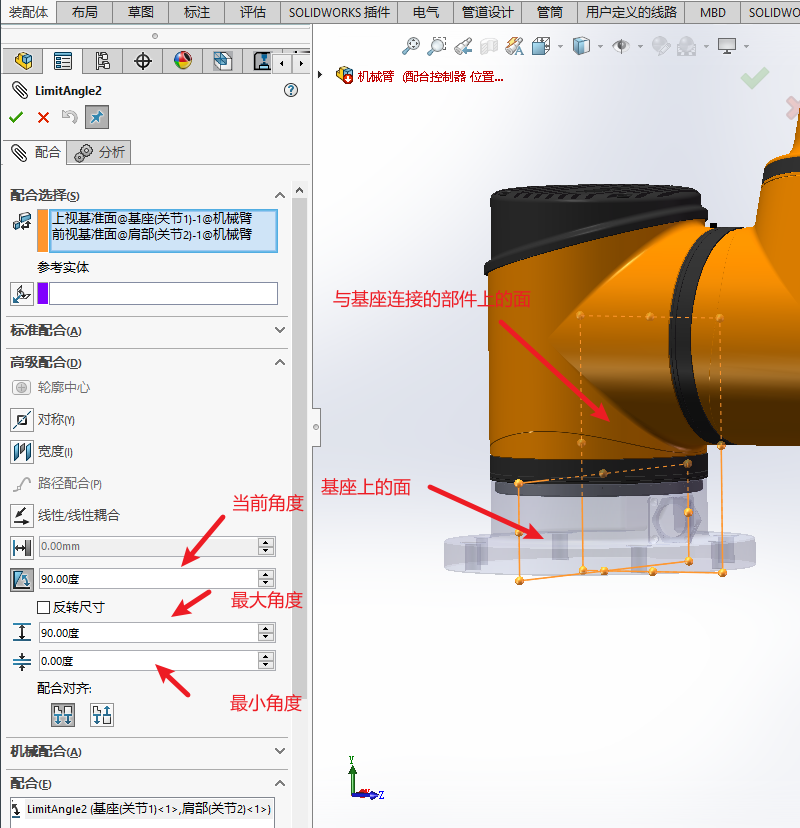
需要添加的是6个角度限制约束,建议为面与面之间的转角限制,以基座为例,找到两个可以描述转动关系的面:
这里展示一下我建好的6个转角约束
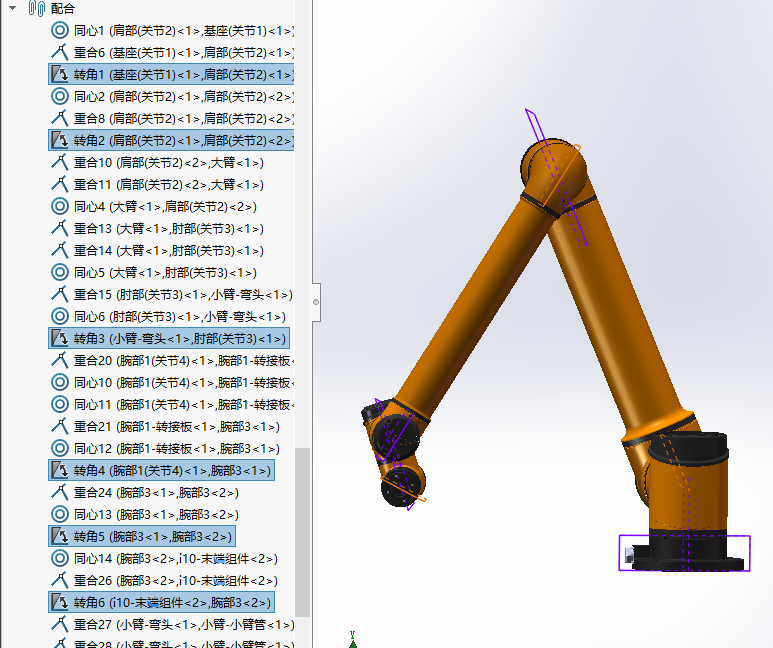
此时已经可以自由拖动机械臂了:
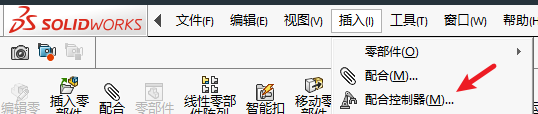
我希望能够统一管理这六个约束,于是添加配合控制器,位置在插入->配合控制器:
使用配合控制器收集配合,然后添加几个期望的位置点
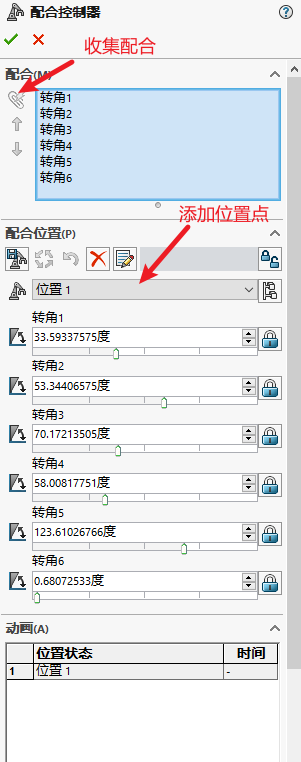
添加位置点
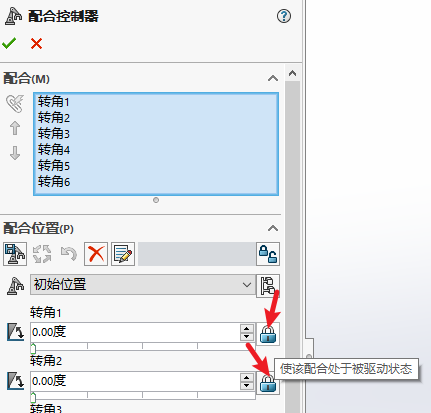
①手动拖动:点击配合控制器中的运动锁定,使配合处于被驱动状态后,即可手动拖动位置
②直接改变角度:拖动转角即可
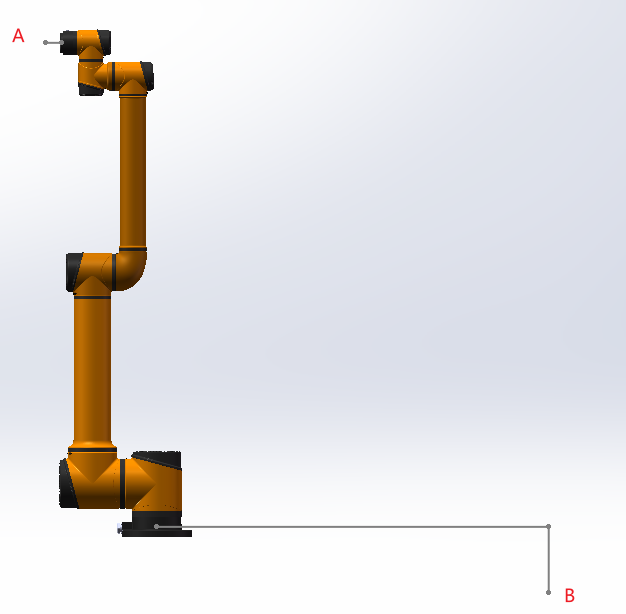
③使末端抵达某特定位置点
这需要使用到配合,例如需要图中A点抵达B点,首先在配合控制器中,让所有配合处于被驱动状态
建立配合,勾选只用于定位
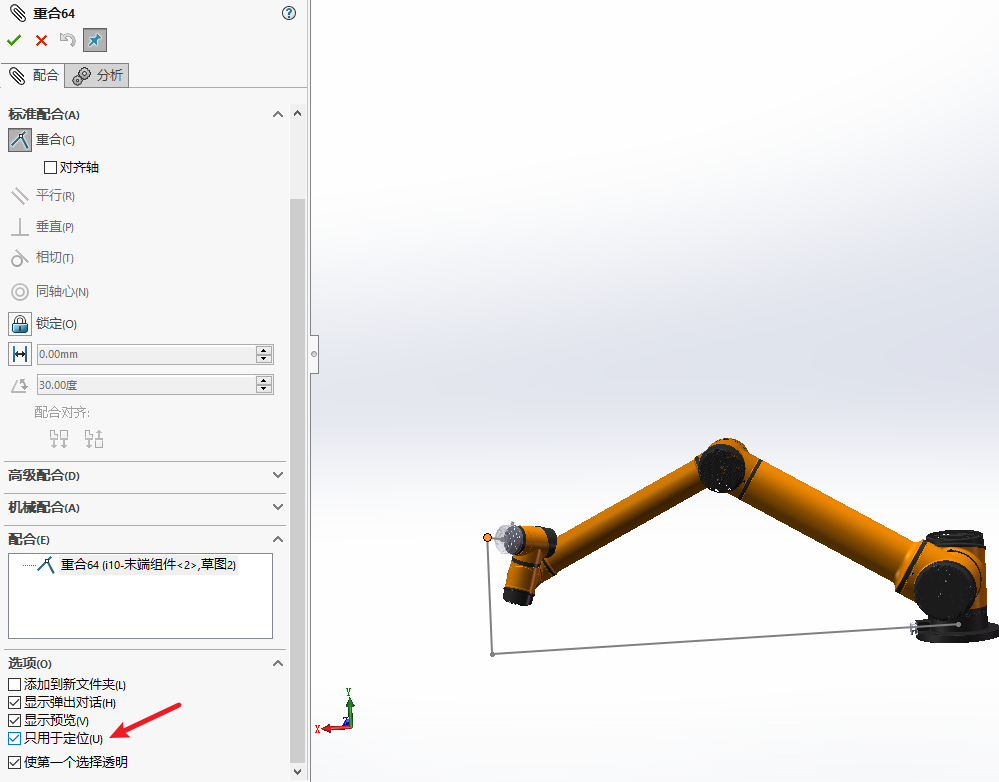
然后在配合控制器内添加目前的位置即可
在配合控制器最下方点击计算动画按钮(带个小齿轮),可以看到目前的动画
生成动画
点击动画向导,选择配合控制器,即可生成动画
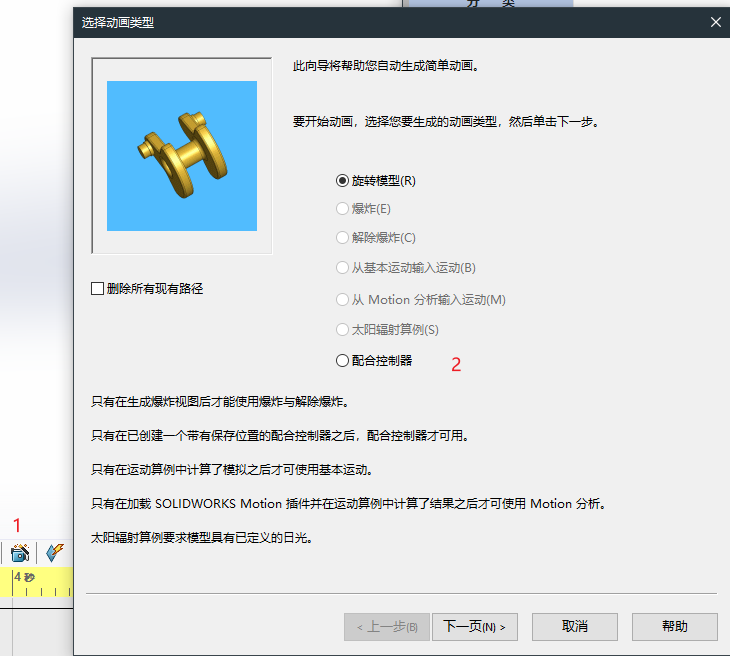
一个简单的机械臂动画就完成啦

 浙公网安备 33010602011771号
浙公网安备 33010602011771号