摘要:  摘要:本项目开发了一套基于YOLO算法的红外行人识别系统,支持图片、视频及实时摄像头检测。系统采用PyQt5界面,具备用户登录、模型切换、结果保存等功能,集成YOLOv5/v8/v11/v12多种模型。通过3000张图片数据集训练,YOLO12n模型达到91.4%的mAP@0.5准确率,YOLO11n实现56.1ms的CPU推理速度。系统提供图形化操作与脚本检测两种模式,适用于安防监控等红外场景下的行人识别需求。源码可通过指定链接获取。 阅读全文
摘要:本项目开发了一套基于YOLO算法的红外行人识别系统,支持图片、视频及实时摄像头检测。系统采用PyQt5界面,具备用户登录、模型切换、结果保存等功能,集成YOLOv5/v8/v11/v12多种模型。通过3000张图片数据集训练,YOLO12n模型达到91.4%的mAP@0.5准确率,YOLO11n实现56.1ms的CPU推理速度。系统提供图形化操作与脚本检测两种模式,适用于安防监控等红外场景下的行人识别需求。源码可通过指定链接获取。 阅读全文
摘要:本项目开发了一套基于YOLO算法的红外行人识别系统,支持图片、视频及实时摄像头检测。系统采用PyQt5界面,具备用户登录、模型切换、结果保存等功能,集成YOLOv5/v8/v11/v12多种模型。通过3000张图片数据集训练,YOLO12n模型达到91.4%的mAP@0.5准确率,YOLO11n实现56.1ms的CPU推理速度。系统提供图形化操作与脚本检测两种模式,适用于安防监控等红外场景下的行人识别需求。源码可通过指定链接获取。 阅读全文
posted @ 2026-01-10 19:12
Coding茶水间
阅读(63)
评论(0)
推荐(0)
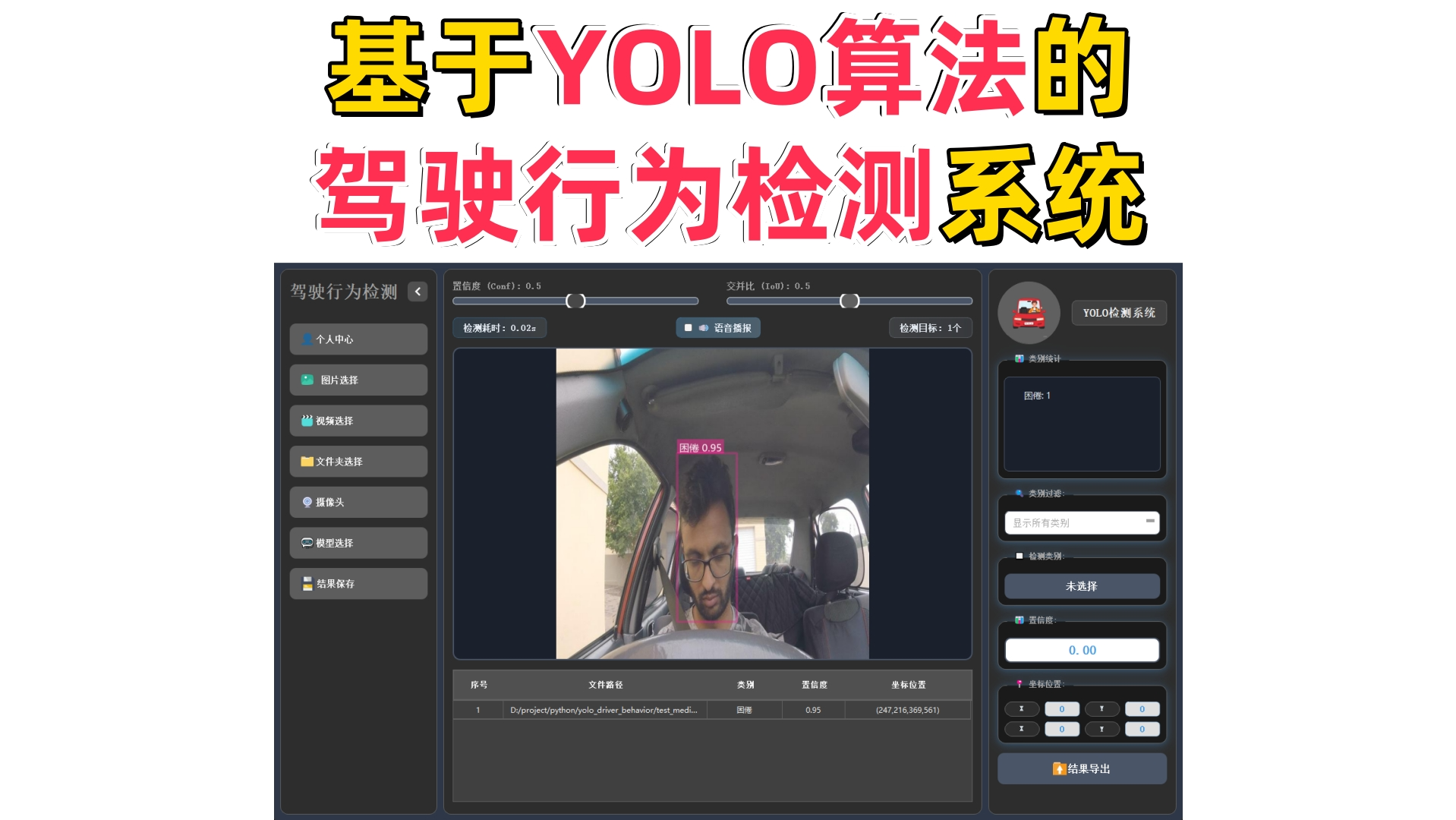 摘要:本文介绍了一套基于YOLO算法的驾驶行为检测系统,采用计算机视觉技术实时识别驾驶员分心、异常姿态等行为。系统具备三区布局界面,支持图片/视频/摄像头多模态检测,并集成语音播报、数据统计和结果导出功能。技术栈采用Python+PyQt5+SQLite,对比分析了YOLOv5/v8/v11/v12模型的性能差异,其中YOLO12n以40.6%mAP精度最优,YOLO11n以56.1ms推理速度最快。系统训练数据包含15类驾驶行为,最终模型在0.5IoU阈值下达到97.4%的mAP准确率。
摘要:本文介绍了一套基于YOLO算法的驾驶行为检测系统,采用计算机视觉技术实时识别驾驶员分心、异常姿态等行为。系统具备三区布局界面,支持图片/视频/摄像头多模态检测,并集成语音播报、数据统计和结果导出功能。技术栈采用Python+PyQt5+SQLite,对比分析了YOLOv5/v8/v11/v12模型的性能差异,其中YOLO12n以40.6%mAP精度最优,YOLO11n以56.1ms推理速度最快。系统训练数据包含15类驾驶行为,最终模型在0.5IoU阈值下达到97.4%的mAP准确率。  本文介绍了一个基于YOLO算法的多种类动物检测识别系统。系统实现了50多种动物的精准识别,具有模块化GUI界面,支持多源输入、模型切换、实时调节和数据可视化。核心功能包括用户管理、多模态检测、结果保存等。通过对比YOLOv5/YOLOv8/YOLOv11/YOLOv12模型,YOLO12n在精度上表现最优(mAP40.6%),YOLO11n在速度上最快(56.1ms)。系统使用19000张图片的数据集训练,最终mAP@0.5达到84.2%,F1值0.79。源码可通过指定链接获取。
本文介绍了一个基于YOLO算法的多种类动物检测识别系统。系统实现了50多种动物的精准识别,具有模块化GUI界面,支持多源输入、模型切换、实时调节和数据可视化。核心功能包括用户管理、多模态检测、结果保存等。通过对比YOLOv5/YOLOv8/YOLOv11/YOLOv12模型,YOLO12n在精度上表现最优(mAP40.6%),YOLO11n在速度上最快(56.1ms)。系统使用19000张图片的数据集训练,最终mAP@0.5达到84.2%,F1值0.79。源码可通过指定链接获取。  本文介绍了一个基于YOLO算法的夜间物体检测系统,该系统通过深度学习技术优化了在光线不足环境下的物体识别性能。系统具备多模态检测能力,支持图片、视频和实时摄像头输入,并提供可视化界面、语音播报和数据统计功能。文章详细展示了系统架构、用户界面和核心训练代码,并对YOLOv5/YOLOv8/YOLOv11/YOLOv12模型性能进行了对比分析,其中YOLO12n在mAP指标上表现最优。该系统使用Python3.10开发,采用PyQt5前端和SQLite数据库,训练数据集包含17000张夜间场景图片,最终实现了77.2%的mAP@0.5检测准确率。
本文介绍了一个基于YOLO算法的夜间物体检测系统,该系统通过深度学习技术优化了在光线不足环境下的物体识别性能。系统具备多模态检测能力,支持图片、视频和实时摄像头输入,并提供可视化界面、语音播报和数据统计功能。文章详细展示了系统架构、用户界面和核心训练代码,并对YOLOv5/YOLOv8/YOLOv11/YOLOv12模型性能进行了对比分析,其中YOLO12n在mAP指标上表现最优。该系统使用Python3.10开发,采用PyQt5前端和SQLite数据库,训练数据集包含17000张夜间场景图片,最终实现了77.2%的mAP@0.5检测准确率。  本文介绍了一款基于YOLO算法的车型识别系统,支持轿车、卡车、公共汽车和摩托车等多种车型识别。系统具备图片、视频、摄像头实时检测及批量处理功能,集成语音播报、结果导出等实用模块,并提供用户登录和模型训练功能。技术栈采用Python 3.10、PyQt5和SQLite,支持YOLOv5至v12多模型切换。测试数据显示,YOLO12n模型以40.6%的mAP表现最优,YOLO11n在CPU推理速度最快(56.1ms)。系统训练数据集包含19,000张图片,mAP@0.5达到70.8%,F1值为0.67,识别效果良好。完整源码可通过指定视频链接获取。
本文介绍了一款基于YOLO算法的车型识别系统,支持轿车、卡车、公共汽车和摩托车等多种车型识别。系统具备图片、视频、摄像头实时检测及批量处理功能,集成语音播报、结果导出等实用模块,并提供用户登录和模型训练功能。技术栈采用Python 3.10、PyQt5和SQLite,支持YOLOv5至v12多模型切换。测试数据显示,YOLO12n模型以40.6%的mAP表现最优,YOLO11n在CPU推理速度最快(56.1ms)。系统训练数据集包含19,000张图片,mAP@0.5达到70.8%,F1值为0.67,识别效果良好。完整源码可通过指定视频链接获取。  本文提出基于YOLO深度学习算法的铁轨缺陷检测系统,通过构建专用数据集训练模型,并开发图形化界面实现自动化检测。系统支持图片、视频、摄像头及批量检测,具备实时显示、语音报警、数据导出等功能。对比YOLOv5/v8/v11/v12模型,YOLO12n精度最高(mAP40.6%),YOLO11n速度最优(56.1ms)。训练结果显示综合mAP@0.5达88.6%,F1值0.85,验证了系统的高效性。该系统为铁路巡检提供了智能化解决方案。
本文提出基于YOLO深度学习算法的铁轨缺陷检测系统,通过构建专用数据集训练模型,并开发图形化界面实现自动化检测。系统支持图片、视频、摄像头及批量检测,具备实时显示、语音报警、数据导出等功能。对比YOLOv5/v8/v11/v12模型,YOLO12n精度最高(mAP40.6%),YOLO11n速度最优(56.1ms)。训练结果显示综合mAP@0.5达88.6%,F1值0.85,验证了系统的高效性。该系统为铁路巡检提供了智能化解决方案。  本文提出基于YOLO深度学习算法的轨道缺陷检测系统,通过构建专用数据集训练模型并开发图形化界面,实现自动化检测。系统支持图片、视频、摄像头及批量检测,具备实时参数显示、语音报警及数据导出功能。实验对比了YOLOv5/v8/v11/v12模型性能,其中YOLO12n精度最高(mAP40.6%),YOLO11n速度最优(56.1ms)。训练结果显示系统综合mAP@0.5达81.8%,F1值0.80,验证了方法的有效性。该系统为铁路巡检提供了一套高效、智能的解决方案。
本文提出基于YOLO深度学习算法的轨道缺陷检测系统,通过构建专用数据集训练模型并开发图形化界面,实现自动化检测。系统支持图片、视频、摄像头及批量检测,具备实时参数显示、语音报警及数据导出功能。实验对比了YOLOv5/v8/v11/v12模型性能,其中YOLO12n精度最高(mAP40.6%),YOLO11n速度最优(56.1ms)。训练结果显示系统综合mAP@0.5达81.8%,F1值0.80,验证了方法的有效性。该系统为铁路巡检提供了一套高效、智能的解决方案。  本文介绍了一套基于YOLO算法的杂草检测系统,支持图片、视频及实时视频流的多模态检测。系统具备模型管理、结果导出、参数调节、语音提醒等功能,采用YOLOv5/v8/v11/v12等模型进行训练,在4000张农田影像数据集上实现了87.5%的mAP@0.5准确率。其中YOLO12n模型表现最优(mAP40.6%),YOLO11n推理速度最快(56.1ms)。系统提供完整的训练脚本和跨平台部署方案,可应用于精准农业中的杂草识别与自动化除草场景。
本文介绍了一套基于YOLO算法的杂草检测系统,支持图片、视频及实时视频流的多模态检测。系统具备模型管理、结果导出、参数调节、语音提醒等功能,采用YOLOv5/v8/v11/v12等模型进行训练,在4000张农田影像数据集上实现了87.5%的mAP@0.5准确率。其中YOLO12n模型表现最优(mAP40.6%),YOLO11n推理速度最快(56.1ms)。系统提供完整的训练脚本和跨平台部署方案,可应用于精准农业中的杂草识别与自动化除草场景。  本文设计并实现了一套基于YOLO算法的轮船分类检测系统,支持图片、视频及实时视频流的多类别船舶检测。系统具备多源检测、模型管理、结果保存、参数调节等功能,采用YOLOv5/v8/v11/v12系列模型,经测试YOLO12n精度最高(mAP40.6%),YOLO11n速度最优(56.1ms)。基于4000张船舶图像训练,系统在mAP@0.5达到93%,F1值0.90,可广泛应用于港口监控、海事巡逻等场景。系统采用Python开发,前端使用PyQt5,支持模型训练与跨平台部署。
本文设计并实现了一套基于YOLO算法的轮船分类检测系统,支持图片、视频及实时视频流的多类别船舶检测。系统具备多源检测、模型管理、结果保存、参数调节等功能,采用YOLOv5/v8/v11/v12系列模型,经测试YOLO12n精度最高(mAP40.6%),YOLO11n速度最优(56.1ms)。基于4000张船舶图像训练,系统在mAP@0.5达到93%,F1值0.90,可广泛应用于港口监控、海事巡逻等场景。系统采用Python开发,前端使用PyQt5,支持模型训练与跨平台部署。  本文提出了一种基于YOLO算法的香蕉成熟度智能检测系统,能够识别5种成熟度类别。系统集成了可视化界面、多模态检测、结果保存等功能,支持图片、视频和实时摄像头检测。通过对比YOLOv5/v8/v11/v12模型性能,推荐YOLO12n(mAP40.6%)用于高精度场景,YOLO11n(56.1ms)用于实时检测。实验显示系统综合mAP@0.5达93.8%,F1值0.88,具有较高准确率。该系统为水果成熟度检测提供了实用解决方案,可应用于果园采收和仓储管理。
本文提出了一种基于YOLO算法的香蕉成熟度智能检测系统,能够识别5种成熟度类别。系统集成了可视化界面、多模态检测、结果保存等功能,支持图片、视频和实时摄像头检测。通过对比YOLOv5/v8/v11/v12模型性能,推荐YOLO12n(mAP40.6%)用于高精度场景,YOLO11n(56.1ms)用于实时检测。实验显示系统综合mAP@0.5达93.8%,F1值0.88,具有较高准确率。该系统为水果成熟度检测提供了实用解决方案,可应用于果园采收和仓储管理。  浙公网安备 33010602011771号
浙公网安备 33010602011771号