Games202笔记:实时阴影(RTR Shadow)
回顾
渲染方程
渲染方程(Rendering Equation)描述光传输的核心公式. 本质是能量守恒的积分方程,描述了一个点在某个方向上的出射辐射度(Radiance)是来自场景中所有其他方向的入射光的加权平均,同时考虑材料表面的反射特性.
标准形式:
- \(L_o(p,ω_o)\):点p在\(ω_o\)方向上的出射辐射度(outgoing radiance);
- \(L_e(p,ω_o)\):点p在\(ω_o\)方向上的自发辐射(emission);
- \(f_r(p,ω_i\to ω_o)\):BRDF(双向反射分布函数),描述表面从入射方向\(ω_i\)到出射方向\(ω_o\)的反射特性;
- \(L_i(p,ω_i)\):点p在\(ω_i\)方向上的入射辐射度(incident radiance from source);
- \(cos θ_i\):值为\(ω_i\cdot \bm{n}\),\(θ_i\)是方向\(ω_i\)与p点法向量\(\bm{n}\)的夹角;
- \(H^2\):p为球心的单位半球面上所有的入射方向.
实时渲染(Real-time rendering, RTR)
1)经常会考虑可见性(Visibility)
2)BRDF常与\(cos θ_i\)一起考虑
于是,RTR渲染方程:
注:未考虑自发光.
与普通渲染方程不同点:
- \(f_r(p,ω_i\to ω_o)cosθ_i\):cos加权的BRDF(cosine-weighted BRDF),常放一起考虑;
- \(V(p,ω_i)\):可见性(Visibility),光源发出的光和visibility结合一起,才是到达p点的incident lighting(入射光);而有些点被遮挡,则无需考虑;
- Ω:单位球面半球(以法线方向为中心)上的所有入射方向.
渲染方程推导过程,参见:计算机图形:辐射度光照模型
环境光
环境光(Environment Lighting)指来自各个方向的入射光照. 典型实现技术:
1)立方体贴图(cube map),或球体贴图(sphere map);
全局光照
全局光照 = 直接光照 + 间接光照
直接光照(Direct illumination):光线只弹射1次;
间接光照(One-bounce global illumination):光线弹射2次(及以上).
阴影贴图
概念
阴影贴图(Shadow Mapping, SM)是一个2趟算法(2-Pass Algorithm),即渲染场景2遍:
1)light pass: 从light出发看向场景,输出light能看到的场景深度,得到距离光源最近的深度,即SM对应的"depth buffer".
2)camera pass: 从camera位置出发,利用SM渲染整个场景.
优点(Pro):无需知道场景的几何结构;
缺点(Con):可能导致自遮挡和锯齿问题;
早期离线渲染,常用阴影贴图实现阴影,现在可用光线追踪.
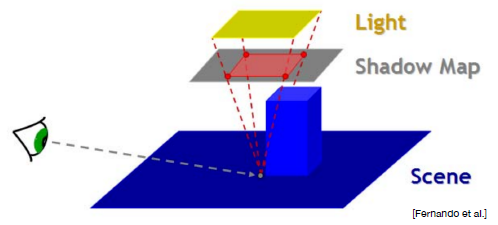
具体做法
第一趟(Pass 1):从光源位置看向场景,输出深度图(depth texture),描述距离光源最近点距离.
第二趟(Pass 2):从眼睛/相机位置看向场景,对每个片元(fragment,也是着色点shading point),都用深度图判断物体是否能被Pass 1中光源所照到,如果不能被照到,说明在阴影里.
如下图,眼睛观察到物品表面上2个点,其中一个在阴影里,称为Blocked;另一个不在,称为Visible.

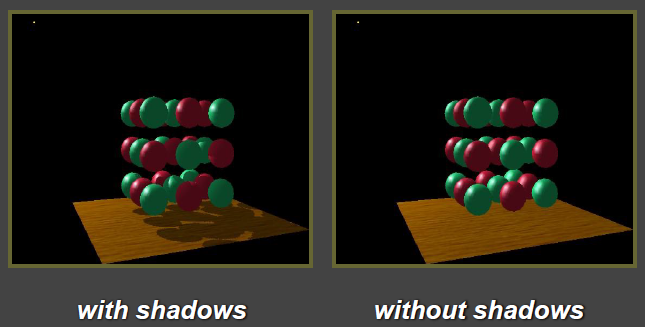
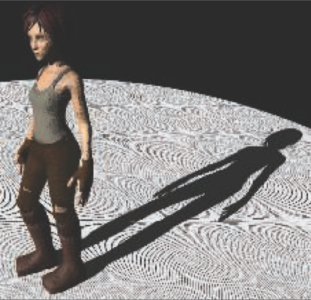
下图是点光源下,有阴影和无阴影的效果图对比:
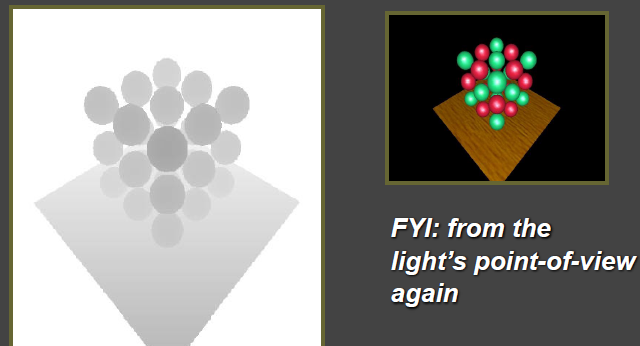
从光源视角看,深度图如下所示:
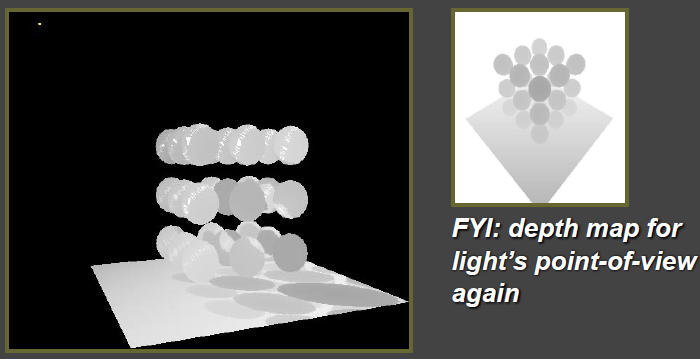
如果将深度图投影到眼睛的视图:
问题
自遮挡
阴影贴图存在自遮挡(self occulusion)问题.
如下图所示,
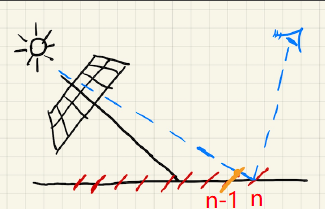
这是因为数值精度. 从光源角度看,深度图上记录的每个像素深度,在场景中目标位置对应一个小的区域(该区域垂直于光源到像素的观察方向).
也就是说,在Shadow Maps看来,场景是离散成一个个小区域的(下图红色区域),而并非是平面(下图底部黑色).
当眼睛观察到物体表面第n区域(实际深度)时,由于Shadow Maps的深度图是离散的,在光源看来,是第n-1区域对应深度(记录深度,比实际深度小). 这样,第n区域就被第n-1区域遮挡,形成自遮挡现象.
什么时候会发生自遮挡现象?
当光线方向与物体表面垂直时,自遮挡现象不明显;
当光线方向与物体表面几乎平行时,自遮挡最严重.
如何解决自遮挡问题?
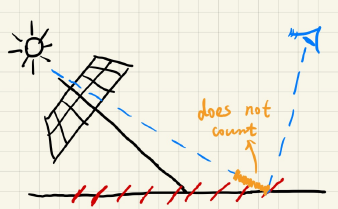
可以为区域设置一个bias作为容忍区间,降低自遮挡现象. 具体来说,
当沿着到光源的方向,实际深度 ~ 实际深度+bias 之间,还存在障碍物时,不算遮挡. 这样,眼睛看到的实际深度(第n区域),就不会被记录成第n-1区域.
但是,又会带来新问题detached shadow,如下图所示,当bias过大时,人物阴影与脚断开了.

目前,工业界还没有真正解决该问题的办法,只是找一个合适的bias,使得渲染结果既不存在自遮挡,又不存在detached shadow问题.
学术界提出了一些解决方法.
- 第二深度阴影贴图(second-depth shadow mapping)
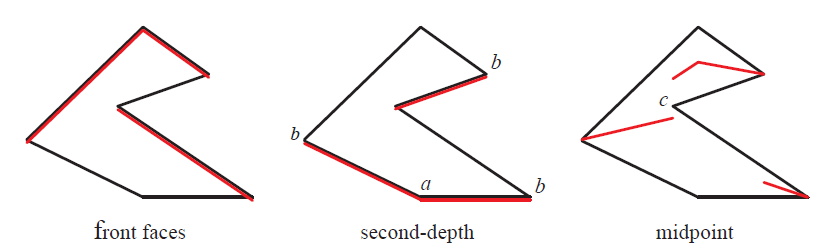
SM中,不仅记录最小深度,还记录第二小深度(次小深度). 当进行深度比较时,用最小深度和第二小深度的平均值(midpoint)与片元深度比较.
如下图是一个鞋子模型,光线垂直向下.
front faces: 是最小深度对应表面示意图;
second-depth:是次小深度对应表面示意图;
midpoint:是二者的均值.
因为该方法存在缺点,导致工业性并未采用:
1)要求物体必须是封闭的(即水密的,watertight);
2)开销可能并不值得. 因为所有片元深度必须比较2次,才能得到最小和次小深度.
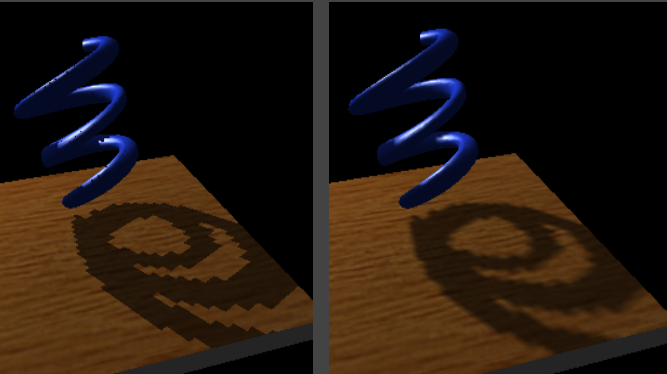
锯齿(Aliasing)
Shadow Maps对场景,是一种离散表示,有一定分辨率. 如果分辨率不够大,就可能存在锯齿(Aliasing)的现象.
如下图阴影:

实时渲染中的数学
近似相等
RTR中,我们不关心不等式,关心近似相等(approximately equal).
RTR中一个重要近似相等:
什么时候结果是准确的(可接受)?
有2种情况,
1)实际积分范围小的时候(Small support);
2)g(x)足够光滑(Smooth integrand),即在积分范围内变化不大.
实时渲染方程的近似相等
RTR中的渲染方程(带可见性):
近似求解:
注:这个公式会在后面用到.
什么时候积分准确?
1)积分范围足够小的时候(点光源 / 方向光源);
2)被积函数光滑(漫反射BSDF / 恒定radiance的面光源).
对于1),光源是点光源或方向光源时,在前面路径追踪(参见计算机图形:Path Tracing)中讲过,为了避免大量光线浪费,我们对光源进行积分. 如果光源面积足够小,那么积分范围足够小.
对于2),
面光源辐射的radiance恒定,可认为\(L_i(p,ω_i)\)不变.
当表面是diffuse材质,发生漫反射,BSDF可认为是光滑的;
当表面是glossy材质,BSDF不能认为是光滑的.
关于材质,参见计算机图形:材质和外观
BSDF = BRDF + BTDF
S: Scattering,散射;
R: Reflective,反射;
T: Transmit,折射.
软阴影
基本概念
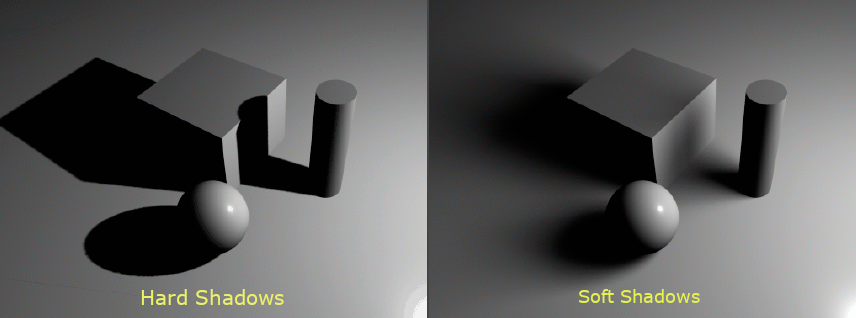
如果使用了面光源或者体积光源,那么则会产生软阴影.
硬阴影(Hard Shadows):没有从有阴影到无阴影的界限.
软阴影(Soft Shadows):从有阴影到无阴影,有一个过渡. 看起来会更自然.
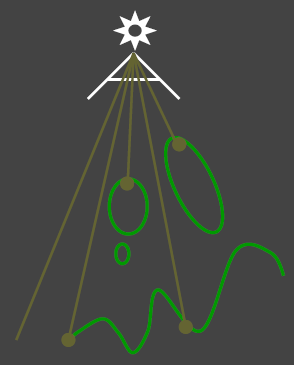
在日食的光照模型中,如果从光源看向阴影,会有部分被遮挡,部分没被遮挡,这就是软阴影的本质.
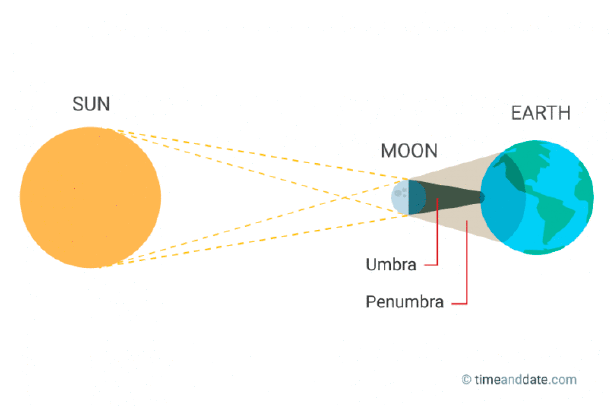
from: https://www.timeanddate.com/eclipse/umbra-shadow.html
本影(umbra):完全被覆盖的阴影区域,如日食时完全被遮挡的部分;
半影(penumbra):部分被阴影覆盖的区域,如日食时部分被遮挡的过渡带.
shadow = umbra + penumbra
PCF
百分比渐进过滤(Percentage Closer Filtering, PCF) 可用来做阴影边缘的抗锯齿的功能. 如果用PCF来做软阴影,则称为百分比渐进软阴影(Percentage closer soft shadows, PCSS).
PCF不是对最后具体的阴影进行filter,也不是对最后的shadow map进行filter.
在之前的阴影贴图中,对片元P点着色时,如何判断P是否在阴影里?
投影到Light视角后,连接P与光源(Light),得到其深度(光源视角),然后与shadow maps上该方向的深度进行比较,看是否是距离光源最近的点. 这里做了一次比较.
tips: shadow maps上每个像素值代表一个深度.
PCF与阴影贴图的区别:投影到Light视角后,我们在shadow maps上找一圈(如7x7)的像素(深度),每一个深度都与片元深度进行比较;然后,将比较结果(0或1)求平均.
例如,对于地面上P点,投影到光源视角后,
1)将其深度与方框内所有像素(如3x3区域)的深度进行比较
2)获取比较结果,例如
1,0,1,
1,0,1,
1,1,0
挡住是0,未挡住是1.
3)求平均值,得到visibility(可见性),如0.667
当然,也可以进行加权平均.
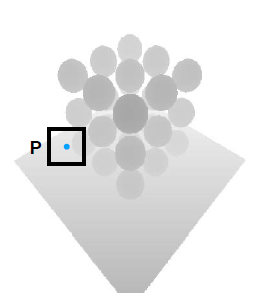
求visibility:
上图中,x是shading point,x投影到shadow map上像素点为p,p像素值代表挡住x的点的深度(如果p depth < x depth).
PCF考虑的不仅仅是p,而是p周围一圈的像素(大小filter size),会对该区域的每个像素点的深度都与x深度进行比较,从而判断有哪些点挡住了x.
最后,将比较结果加权平均,于是得到visibility.
如果用数学表达这个过程,那就是滤波器(Filter)/卷积(convolution):
其中,
- \(N(p)\)代表p点邻域
- \(f(q)\)是q depth与x depth比较结果(是否挡住x)
- \(\omega(p,q)\)是求平均时权值
在PCSS中,我们最终要得到是的x点的Visibilty,即
其中,
- \(χ^+\)是符号函数,值域{0,1}. 0代表q挡住x,1代表q未挡住x
- \(D_{SM}\) shadow map上q点的depth
- \(D_{scene}\) x点的depth
当\(D_{SM} - D_{scene} < 0\)时,\(χ^+[D_{SM}(q)-D_{scene}(x)]=0\),代表q距离光源更近,即q挡住x;
否则,\(χ^+[D_{SM}(q)-D_{scene}(x)]=1\),代表q未挡住x.
注意:
1)PCF并不直接对shadow map进行过滤(filter)/模糊,因为shadow map存放的是Light视角的depth,而我们要求的\(V(x)\)是x的可见性
2)PCF也不是在图像上做过滤(filter)
PCF效果图
下图是直接对阴影的结果(图像)进行filter,得到的不是软阴影:
可以看到,仍然有锯齿问题.
下图是用PCF的处理效果:

可以看到,没有锯齿问题,有较好的软阴影效果.
PCF过滤窗口大小(filtering size)与软阴影:
1)越小,得到的阴影越锐利;
2)越大,得到的阴影越柔和;
PCSS
能否用PCF实现软阴影效果?
答案: 是的. 可以用一个比较大的filtering size. 但不是越大越好,阴影不是越软越好.
例如,下图中,有些地方阴影应该硬,有些地方应该软:
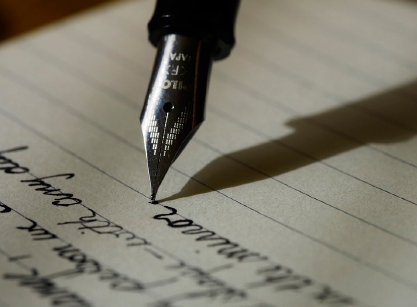
不难发现,距离钢笔尖(光线的遮挡物)越近的地方,阴影越锐利;距离越远,阴影越柔和.
于是,针对不同地方,应该有不同的filter size,以得到不同的阴影的柔和效果.
- Filter size <-> 遮挡物距离(blocker distance),准确来说,相对平均的、投射的遮挡物的深度(relative average projected blocker depth)
确定filter size
如何确定filter size?
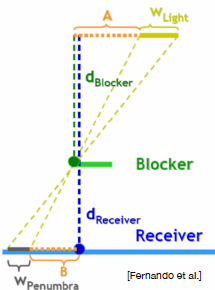
如上图,根据三角形相似性:
其中,
- \(w_{Penumbra}\) 半影区域宽度(Penumbra width),即软阴影区域宽度,通常用该项作为filter size;/
- \(w_{Light}\) 光源区域的宽度(Light width);
- \(d_{Receiver}\) 光源到Receiver的距离(Receiver depth);
- \(d_{Blocker}\) 光源到遮挡物的距离(Blocker depth).
注意: 光源是面光源(或称区域光,Area Light). PCSS的核心目标是模拟软阴影(边缘柔和的阴影),而软阴影通常由非点光源(如面光源、线光源等)产生.
blocker不一定是一个规则的平面,可能是球心,钢笔形状,或其他任意形状. 对于一个shading point,我们要计算的是,在一定范围内,在shadow map上有多少挡住它的像素,这些像素记录的深度的平均值,就是blocker depth.
为了确定filter size,我们得确定blocker到shading point的距离,即\(d_{Receiver} - d_{Blocker}\)
PCSS算法步骤
1)Blocker search:搜索Blocker,在一定区域内得到blocker depth平均值
shading point连向点光源,找shadow map上周围的一个区域,判断shading point是否在阴影里.
如果在阴影里,那么找到的那个像素对应的深度,就是blocker depth. 当然,我们会找附近几个像素点对应的区域的深度值,求平均,作为blocker depth平均值.
2)Penumbra estimation:半影估计,计算\(w_{Penumbra}\)
用平均blocker depth计算出\(w_{Penumbra}\),从而决定filter size.
3)PCF filter
确定了filter size,就能进行PCF过滤.
搜索blocker时,应该用多大范围?
2类方法:
1)用一个常数区域,如5x5;
2)启发式方法可能更佳.
启发式方法:连接面光源与shading point,形成四棱锥,与shadow map(假设放在Light视角观察空间的近平面)相交的区域,就是可能遮挡shading point的区域.
第1)、3)步会访问邻域范围所有像素,然后再求平均,可能会很慢. 如何解决这个问题?
答:在对应区域内随机取样. 不过可能会存在噪声,可以在图像空间降噪处理.
VSSM
方差软阴影映射(Variance Soft Shadow Mapping,VSSM)
-
针对性解决PCSS中,第1)步(blocker search)、第3)步(PCF filtering)慢的问题.
-
PCF中,如何知道:
- 在shading point前面的texels的百分比,即有多少texels深度 < shading point depth?
- 有多少texels在搜索区域范围内?
如果知道这两点信息,是不是就能知道,在搜索区域内,有多少texels遮挡了shading point?
这就好比一场考试中,我知道自己成绩,如何知道自己排名第几,有多少人比自己考得好.
可以用直方图来精确回答该问题,但直方图的前提是对所有数据统计;可以用正态分布(Normal distribution)近似回答该问题.
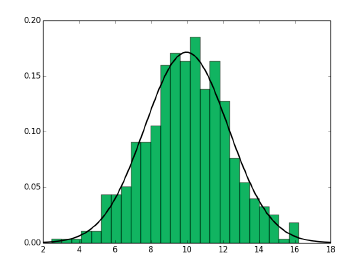
而用正态分布的关键点是:快速计算区域内深度的期望(mean)和方差(variance).
- 求期望(均值)
1)求平均值可以用硬件MIMAP(Hardware MIPMAPing),缺点只能求正方形区域均值;
2)Summed Area Tables (SAT),也称为积分图(Integral Image),一种用于快速计算矩形区域求和的数据结构和算法.
- 方差
可以用另一张texture存放\(depth^2\),从而计算其期望;
实践中,shadow map像素值R通道可存放深度(depth),B通道可存放深度平方(\(depth^2\)).
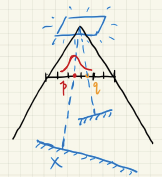
回到我们的主体. 我们求期望、方差,是为了求出正态分布的pdf,进而求出有多少texels深度比x深度大,有多少texsel深度比x深度小. 这就是概率论中的CDF(Cumulative Distribution Function,累积分布函数).
CDF定义:对于一个随机变量 X,其累积分布函数\(F_X(x)\)定义为:
\[F_X(x) = P(X\le x) \]即\(F_X(x)\)表示随机变量X取值小于等于x的概率.
CDF(x)的几何意义:PDF(x)对x在\((-∞,x]\)上求积分结果(下图阴影面积).
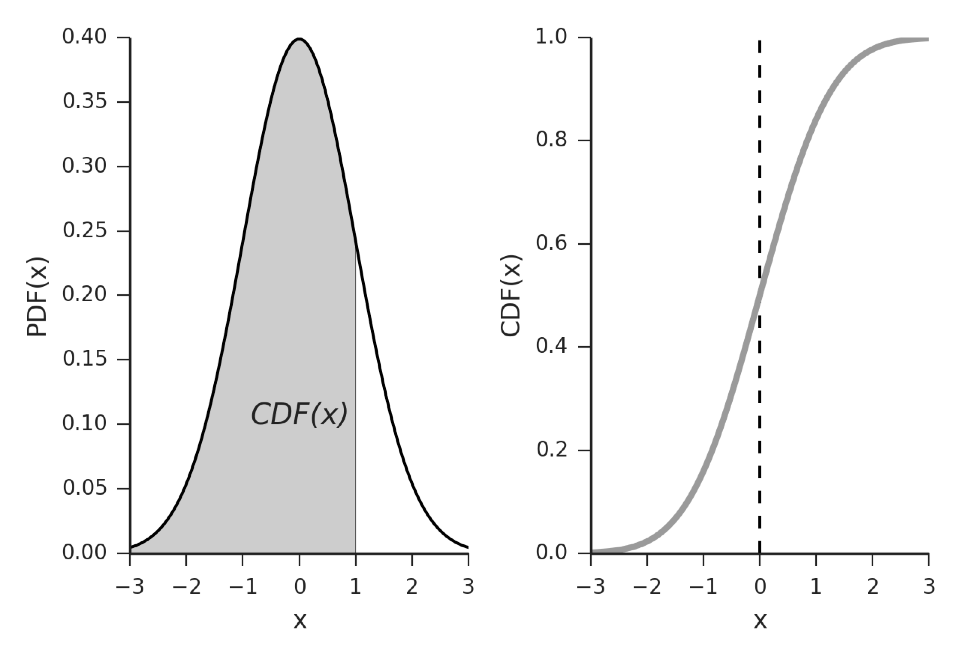
该积分解没有解析函数,不过有数值解,称为Error Function(误差函数). C++中erf实现了该功能.
VSSM用一个不等式对其进行了改进:
- 单边切比雪夫不等式(On-tailed Chebyshev's Inequality)
描述任意随机变量的取值偏离其期望值的概率上限.
单边切比雪夫不等式定义:
设 X 是一个随机变量,其期望为 \(μ\),方差为 \(σ^2\). 则对任意正数 t > 0,有:
\[P(X-μ\ge t)\le \frac{σ^2}{σ^2+t^2} \]
证明参见:概率论:切比雪夫不等式
可用单边切比雪夫不等式求得概率\(P(X>t)\),即下图阴影面积:
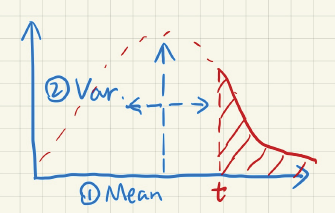
切比雪夫不等式不要求正态分布.
针对PCSS第3)步,根据切比雪夫不等式,知道shadow map上有多少(百分比)像素深度比shading point大,有多少比shadping point小,再乘以filter size,就能得到数量. 进而求出visibility.
针对PCSS第1)步,我们要求的是在一个区域范围内,遮挡住shadping point的blocker的平均深度. 而整个区域的平均深度可以通过Hardware MIPMAPS或者SAT快速求解,记为\(z_{avg}\).
我们关心的是shadow map上指定区域内,深度 < shading point 的点.

假设blocker(z<t)的平均深度\(z_{occ}\),non-blocker(z>t)的平均深度\(z_{unocc}\).
设non-blocker的像素数量\(N_1\),blocker的像素数量\(N_2\),像素总数\(N=N_1+N_2\)
有,
记shading point深度为t,
\(\frac{N_1}{N}=P(X>t)\),可通过切比雪夫不等式求解\(P(X>t)\);
\(\frac{N_2}{N}=P(X<t)=1-P(X>t)\).
我们要求的是\(z_{occ}\),现在还差\(z_{unocc}\)未知. 由于shadow receiver(阴影接收者)常常是一个平面,因此假设非遮挡物深度与shading point深度一样,即\(z_{unocc}=t\)
下图是VSSM阴影效果:

from: https://developer.nvidia.com/gpugems/GPUGems3/gpugems3_ch08.html
MIPMAP
给定一个区域,如何快速得出该区域平均值?并且该区域保证是矩形.
之前提过有两种方法:
1)MIPMAP
2)SAT
MIPMAP做的是快速的、近似的、方形的范围查询.
对于一张纹理贴图,我们每次减小其一半分辨率,得到一组Mimmap.
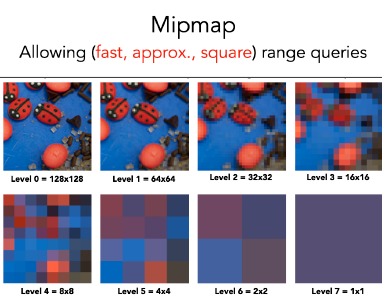
如果原图(Level 0)的任意位置(x,y),如何在Level 5上找到对应位置?
那就需要做双线性插值.
具体可参见GAMES101 Lecture 09
缺点:
1)因为是做插值,所以不准;
2)如果如果查询范围不与现成Mipmap的level一致,就需要在Mipmap的层级之间插值,即三线性插值.
SAT
SAT(Summed Area Tables), 是一种求和的经典数据结构和算法,与前缀和算法紧密联系.
- 1维
数据结构如下:
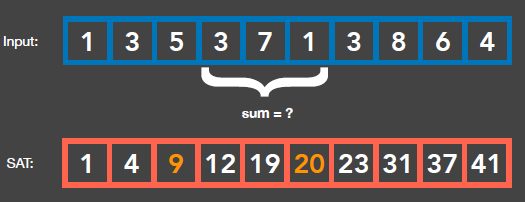
SAT的每个元素,代表的是从输入第0个元素开始,加到这个位置元素的和. 即\(SAT[i]=sum\{input[0],...,input[i-1]\},i=0,1,...,n\)
这样,当我们想求input的第3~5个元素和时,
\(SAT[5]-SAT[2]=20-9=11\)
- 2维
如下图,对于2维情况,我们如何求蓝色矩形内所有值的内?

从左到右依次是:蓝色矩形、绿色矩形、左半边橙色矩形、右半边橙色矩形、左上角绿色矩形
绿色矩形 - 左半边橙色矩形 - 上半边橙色矩形 + 左上角绿色小矩形 = 蓝色矩形
式中,除了蓝色矩形,其他矩形的起点都是左上角. 于是,可以预计算一张表,表里的元素表示,从左上角开始加到当前位置元素(图中白色点)的和,对应整个矩形的值.
i.e. 我们只需要查4次,就能得到指定矩形区域内所有元素的和.
如何建立该SAT?
每行都是一个1维SAT,代表这一行从左加到右对应的和;每一列都是一个1维SAT,代表这一列从上到下对应的和. i.e. 只需要横着对每行做一遍,竖着对每一列做一遍.
由于横、竖计算和相互独立,因此可以用GPU加速.
Moment Shadow Mapping
VSSM存在缺陷:
对于一些特殊的障碍物,如下图右,如果还是按正态分布来估计深度,那么得到的阴影是不正确的.
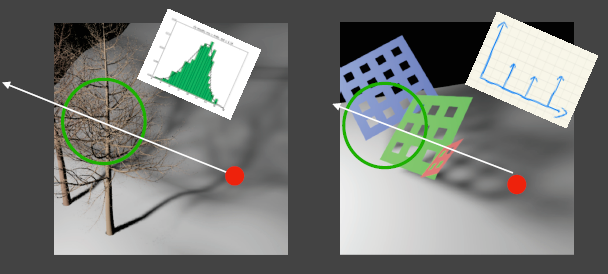
深度分布不准确,可能导致2类问题:
1)过暗:可能可以接受
2)过亮:漏光(Light Leaking)
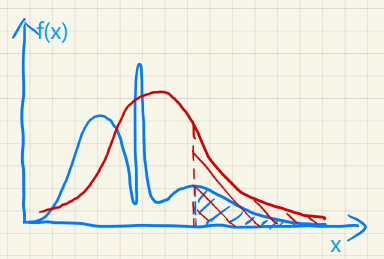
问题原因:真实的障碍物深度(x)对应概率密度函数(f(x)),可能如下图蓝色曲线,而我们用红色的正态分布曲线来计算,会导致\(P(X>t)\)多算了(对应图中阴影面积),也就是障碍物少算了,最终导致漏光现象.
于是,Peters提出Moment Shadow Mapping(MSM) 解决该问题. Moment Shadow Mapping是一种改进的阴影映射技术,用于生成更高质量的软阴影(Soft Shadows). 它通过高阶矩(Moments)来存储深度分布信息,相比传统的Shadow Mapping或Variance Shadow Mapping(VSM),能更有效地减少阴影的走样(Aliasing)、光渗(Light Bleeding)(俗称漏光)等问题.
PCSS中,shadow map存放depth的一阶信息,用于表示Light视角的深度信息;
VSMM中,存放depth的一阶、二阶信息,其中二阶用于快速求方差;
Moment Shadow Mapping中,通过高阶矩(Moments),存放depth更高阶的信息.
如下图,分别是PCF和一系列阶跃函数堆积而成的函数(深度的CDF),每条曲线最高价分别是2、3、4.
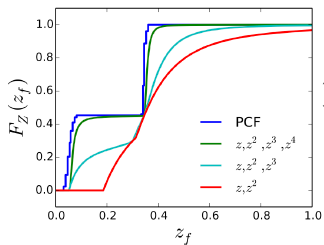
PCF是对filter size区域的depth与shading point比较结果求平均,因此较为准确;
阶跃函数堆积而成的函数是对深度的估计,因此可能存在较大误差.
m阶的moments,能存放m/2阶梯. 上图最高4阶阶跃函数,因此最多存在2个台阶.
通常,使用4阶moments即可,能实现较好阴影效果.
下图是使用VSSM和Moment Shadow Mapping的效果对比:
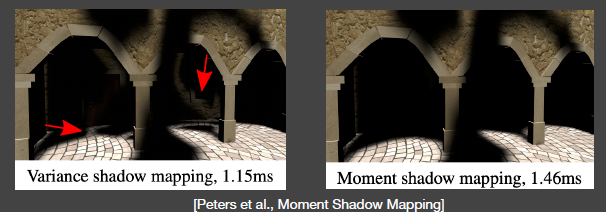
可以看出,Moment Shadow Mapping效果更好,不存在漏光现象.
Distance Field Soft Shadows
距离场软阴影(Distance Field Soft Shadows,DFSS),一种基于有向距离场(Signed Distance Field, SDF)的高效软阴影渲染技术.
核心思想:通过距离场快速估算光线与遮挡物的接近程度,动态计算阴影的软硬程度.
先来看一个使用DFS和Hard Shadow渲染阴影效果对比:
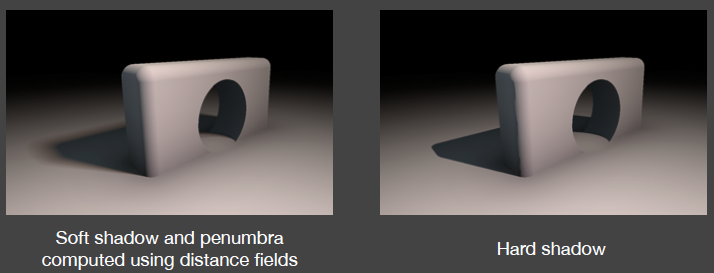
使用DFS的阴影明显柔和很多.
距离函数(Distance Functions):
在空间中任意一点,定义它到某个物体表面上最近一个点的距离,即它到物体表面的最小距离. 这个距离是有向距离,带正负号,例如,物体内部为负号,物体外部为正号.
距离场([Signed] Distance Field),通常缩写为SDF.
下图是字母A的SDF:
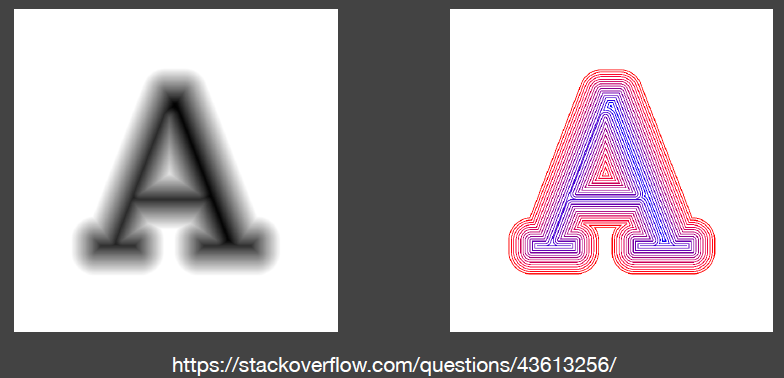
左图,图上任一点都能计算该点到字母A的轮廓的最近距离,距离A越远,值越来越小,看起来越来越模糊;
右图,类似等值线,类比于地图的等高线,同样颜色表示的值一样,因此轮廓看起来是一圈圈的.
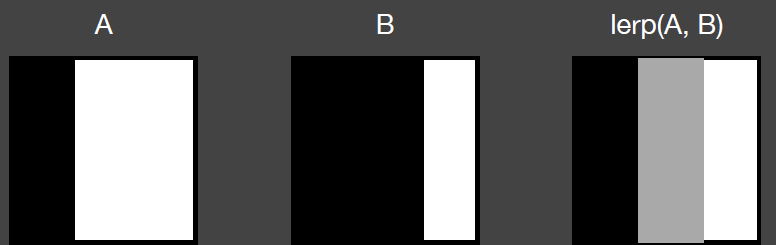
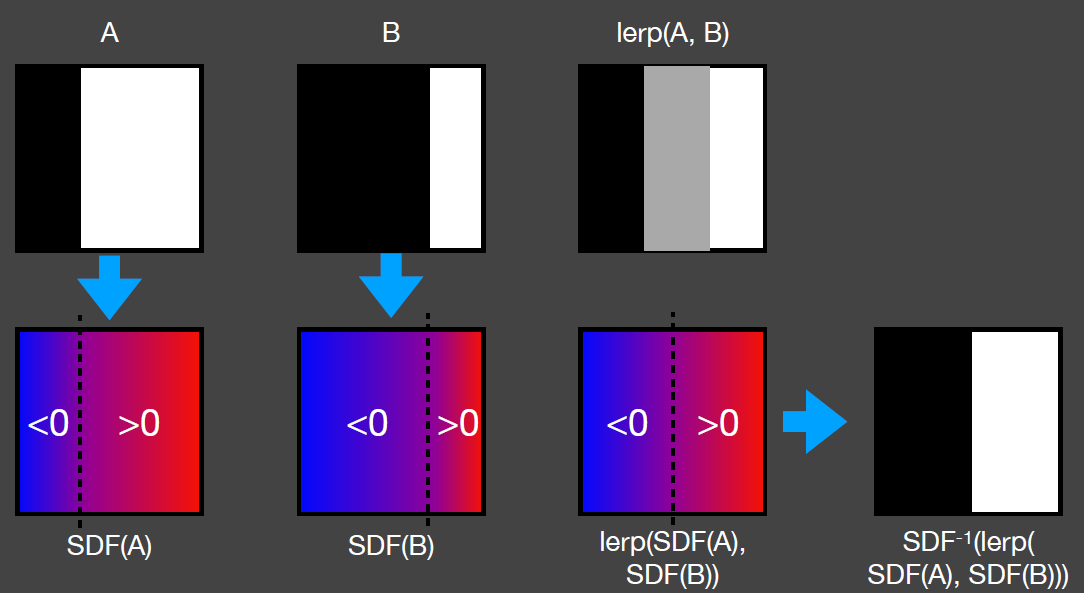
上图blend(混合)运动的边界. A、B两张图,左半边(黑色)有个物体,在从左往右移动.
假设A代表某个时刻,物体在黑白边界;B代表未来另一个时刻,物体移动到新的黑白边界.
现在对A、B进行线性插值:取A、B相同位置像素,做线性平均(如A占50%、B 占50%),可得到第三幅图(lerp(A,B)).
但是,这样得到的是中间灰色过渡带. 如何能得到在中间的边界?
现在我们做些改进.
我们定义,在物体内部(黑色部分),规定为负值,物体外部(白色部分),规定为正值. 随着点距离边界不同位置,可以赋以不同大小.
于是,可以得到如下图所示A、B转化而成的SDF. 这样,我们对A、B对应位置的SDF做线性平均,可得到第三幅图(lerp(SDF(A),SDF(B))).
然后,根据SDF=0,可恢复出边界.
优点:可表示物体边界,不需要关注物体拓扑关系.
如何计算场景的SDF?
可以每个问题单独计算SDF,然后空间中每个点的SDF是所有物体SDF的最小值.
SDF的使用
- 应用1
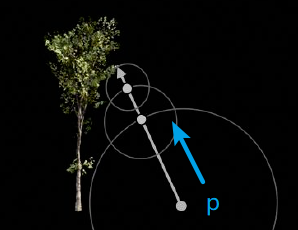
光线步进(Ray Marching)(球体追踪):假设已经得到场景的SDF,现在有一根光线,就能对光线和SDF所隐含的表面求交
SDF背后隐含了一个思想:
SDF的数值等于一个“安全”半径范围,在安全范围内,不可能与任何物体相交.
于是,任何时候在p点,都能往给定方向往前轴SDF(p)的距离,不会与其他物体相交.
优缺点:
场景中每个点都需要计算并存储SDF,所需存储量极大;
运动的物体,可以用SDF,但形变的物体不行,因为物体的SDF需要重新算一遍.
- 应用2
使用SDF(有向距离场)估算遮挡百分比(percentage of occlusion).
任意一个点的SDF,告诉我们一个安全角度(从眼睛看向物体)
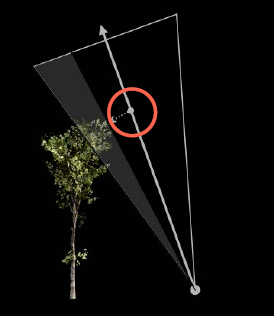
越小的安全角度,意味着更少的可见性.
如下图,在光线步进过程中,从眼角出发,在每一步计算安全角度. 我们取最小的安全角度,就能知道阴影偏黑,还是偏白.
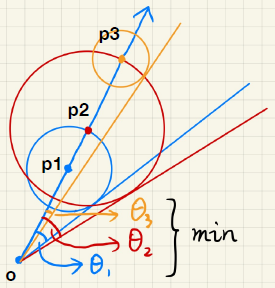
计算p点安全角度:
但是,在shader和RTR中,反三角计算量非常大,通常应该避免. 可以用下面方法减少计算量:
k作用:
一个比较大的k值,意味着很小的安全角度也会被当做1,0~1之间过渡带变窄. 极端情况下,k特别大,会变成硬阴影,要么是0,要么是1.
- 距离场做软阴影
优势(Pros):
1)快(忽略了距离场的生成时间)
2)高质量
缺点(Cons):
1)需要预计算(precomputation)
2)需要大量存储(三维场景中每个点都需要存储SDF)
小结
点光源本来就应该产生Hard Shadow,所以不用考虑PCSS;面光源、多个光源,才会产生Soft Shadow,需要考虑PCSS.
参考
[1] Games202 Lecture3
[2] Tomas Möller, Haines E .Real-Time Rendering 4th Edition[M].DBLP,1999.
[3] Peters C , Klein R .Moment shadow mapping[J].ACM, 2015.DOI:10.1145/2699276.2699277.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号