会员
周边
新闻
博问
闪存
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
数星星的猫
博客园
新随笔
联系
订阅
管理
2025年9月7日
Ubuntu22.04 上安装ros1 Neotic 方法
摘要: Ubuntu22.04 上安装ros1 Neotic 方法
阅读全文
posted @ 2025-09-07 14:44 数星星的猫
阅读(467)
评论(0)
推荐(0)
2024年2月12日
树莓派相关配置
摘要: 树莓派配置记录 1、网络配置 系统为ubuntu 16.04,配置wifi 连接固定wifi 网络,以及配置静态IP方便ssh登录,配置步骤: sudo vim /etc/network/interfaces 添加以下内容: auto wlan0 allow-hotplug wlan0 iface
阅读全文
posted @ 2024-02-12 22:32 数星星的猫
阅读(72)
评论(0)
推荐(0)
2024年2月5日
Android Studio导入机智云SDK
摘要: 1 New project 修改build.gradle buildscript { repositories { jcenter() google() } dependencies { classpath 'com.android.tools.build:gradle:3.5.2' // NOTE
阅读全文
posted @ 2024-02-05 18:12 数星星的猫
阅读(87)
评论(0)
推荐(0)
2021年11月7日
LS01D 激光雷达使用教程
摘要: 1、首先通过USB线连接雷达转接板与电脑,此时转接板指示灯点亮。 2、修改端口映射,可以参考https://www.cnblogs.com/xgth/p/12968243.html 也可以用配置好的文件:https://files.cnblogs.com/files/xgth/lidar.rules
阅读全文
posted @ 2021-11-07 22:39 数星星的猫
阅读(1478)
评论(0)
推荐(0)
2020年12月14日
ubuntu16.04 扩容
摘要:
ubuntu16.04 使用gparted 扩展磁盘空间
阅读全文
posted @ 2020-12-14 17:03 数星星的猫
阅读(641)
评论(0)
推荐(0)
2020年12月8日
autoware安装
摘要: autoware 安装过程
阅读全文
posted @ 2020-12-08 09:12 数星星的猫
阅读(977)
评论(0)
推荐(0)
2020年12月6日
C++ 标准模板库
摘要: C++中的容器、迭代器、算法与函数对象。
阅读全文
posted @ 2020-12-06 10:11 数星星的猫
阅读(380)
评论(0)
推荐(0)
2020年12月5日
ROS MoveBase与路径规划
摘要: ROS中movebase框架介绍与Navigation
阅读全文
posted @ 2020-12-05 18:30 数星星的猫
阅读(2348)
评论(0)
推荐(0)
2020年12月3日
ROS通信机制
摘要: ROS 通信机制;Topic、Service、Action
阅读全文
posted @ 2020-12-03 10:49 数星星的猫
阅读(735)
评论(0)
推荐(0)
2020年11月10日
在ROS Kinetic上运行loam_velodyne
摘要:
LOAM原理简介,并在ROS Kinetic中使用数据包进行测试
阅读全文
posted @ 2020-11-10 11:15 数星星的猫
阅读(474)
评论(0)
推荐(0)
下一页
公告
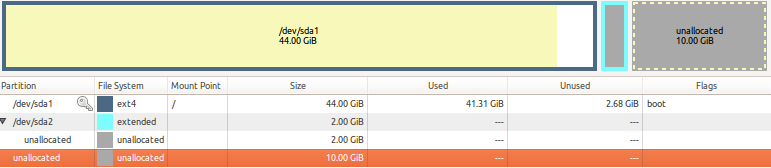 ubuntu16.04 使用gparted 扩展磁盘空间 阅读全文
ubuntu16.04 使用gparted 扩展磁盘空间 阅读全文
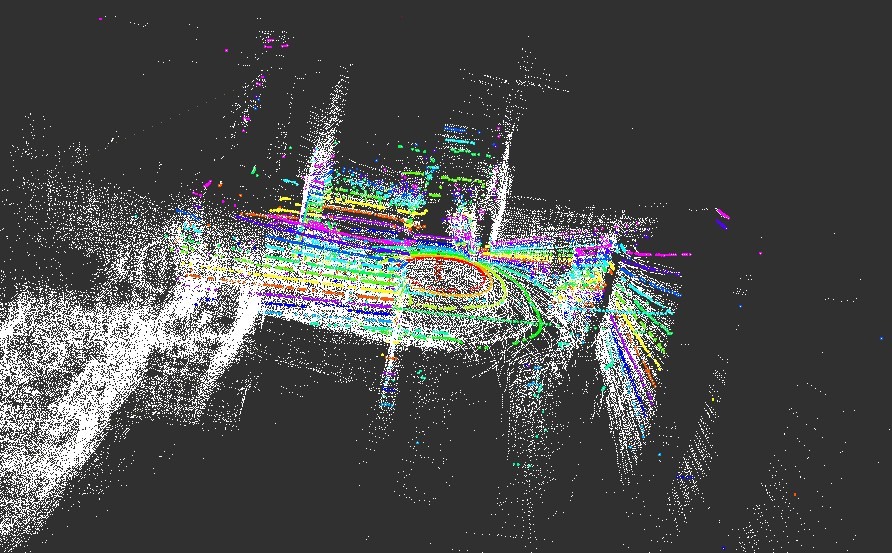 LOAM原理简介,并在ROS Kinetic中使用数据包进行测试 阅读全文
LOAM原理简介,并在ROS Kinetic中使用数据包进行测试 阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号