autoware安装
ubuntu 16.04 使用源码方式安装autoware 1.12.0版本。
1.版本列表
系统:Ubuntu16.04+Kinetic
autoware_version: 1.12.0
Qt:5.2.1 or higher
CUDA:9.0
2. System dependencies for Ubuntu 16.04 / Kinetic
$ sudo apt-get update $ sudo apt-get install -y python-catkin-pkg python-rosdep ros-$ROS_DISTRO-catkin gksu $ sudo apt-get install -y python3-pip python3-colcon-common-extensions python3-setuptools python3-vcstool $ pip3 install -U setuptools
3. 创建工作区
$ mkdir -p autoware.ai/src
$ cd autoware.ai
4. Download the workspace configuration for Autoware.AI.
wget -O autoware.ai.repos "https://raw.githubusercontent.com/Autoware-AI/autoware.ai/1.12.0/autoware.ai.repos"
下载时间较久,用了半天时间。
5. 下载到工作空间中
$ vcs import src < autoware.ai.repos
6. 安装依赖
$ rosdep update $ rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
7. 编译工作空间
//With CUDA support $ AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release //Without CUDA Support $ colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
8. 数据包下载:
-
Download the sample 3D pointcloud/vector map data. [link]
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz
2. Download the sample data (LiDAR: VELODYNE HDL-32E, GNSS: JAVAD GPS RTK Delta 3) in ROSBAG format
$ wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gz
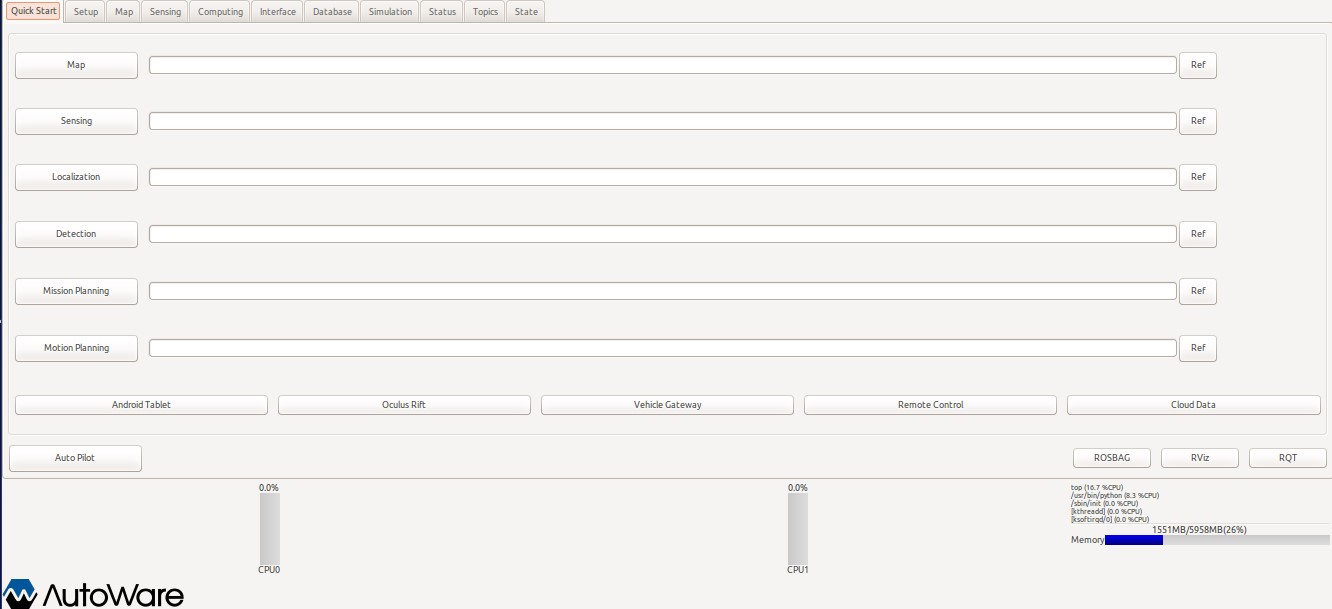
9. 运行结果
roslaunch runtime_manager runtime_manager.launch
参考链接:https://github.com/Autoware-AI/autoware.ai/wiki/Source-Build

 浙公网安备 33010602011771号
浙公网安备 33010602011771号