会员
周边
新闻
博问
闪存
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
数星星的猫
博客园
新随笔
联系
订阅
管理
上一页
1
2
2020年11月1日
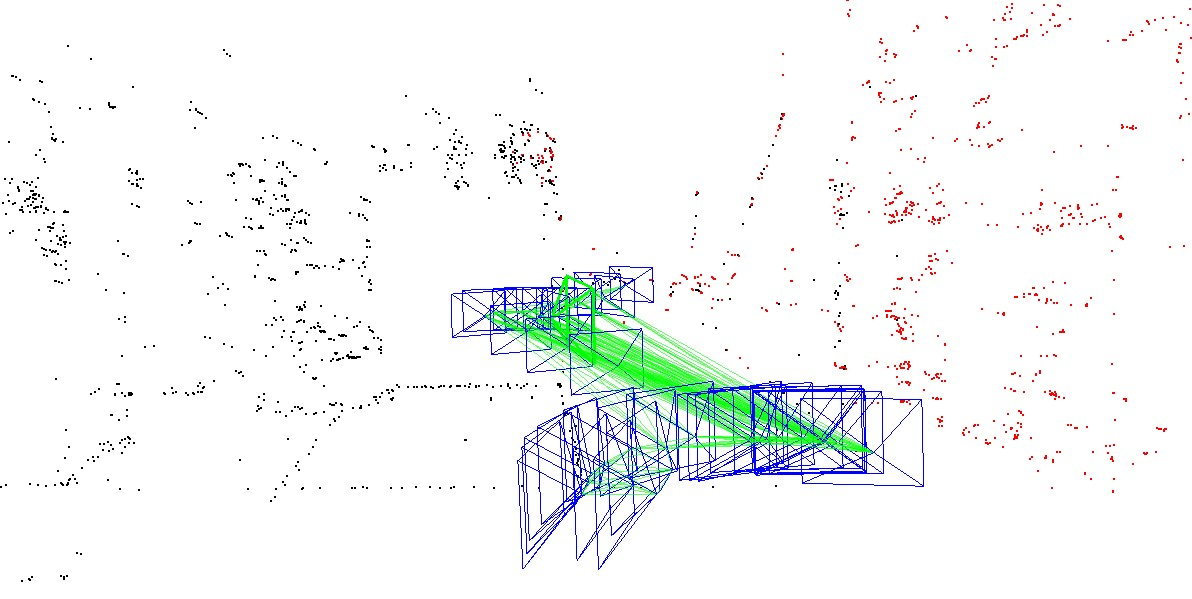
使用奥比中光RGBD摄像头运行ORB_SLAM2
摘要:
使用奥比中光摄像头运行ORB_SLAM2
阅读全文
posted @ 2020-11-01 11:22 数星星的猫
阅读(3155)
评论(4)
推荐(0)
2020年10月29日
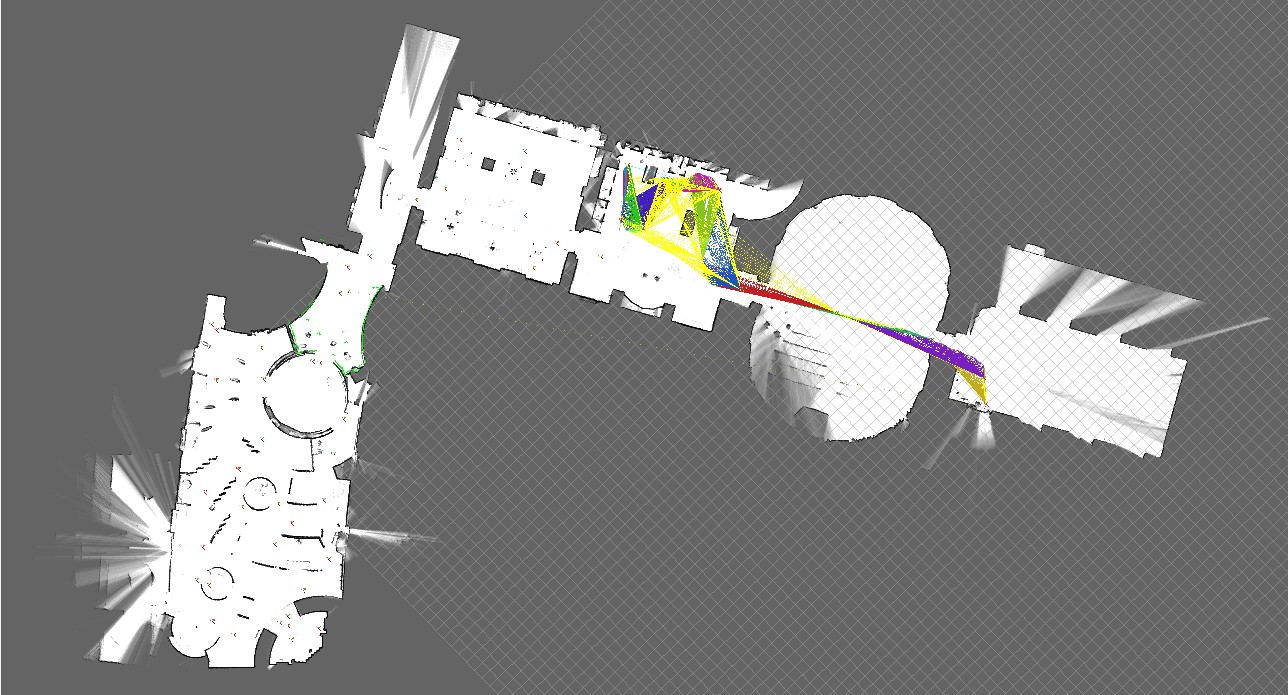
ubuntu16.04安装cartographer
摘要:
ubuntu16.04上安装cartographer,并使用数据包进行测试。
阅读全文
posted @ 2020-10-29 19:51 数星星的猫
阅读(1517)
评论(0)
推荐(0)
2020年10月18日
C++ 相关知识点
摘要: c++ 知识点总结
阅读全文
posted @ 2020-10-18 10:37 数星星的猫
阅读(344)
评论(0)
推荐(0)
2020年10月17日
gmapping 源码详解
摘要: 通过对gmapping源码分析,并进行概括,讨论gmapping建图流程。分析drawFromMotion、scanMatch、updateTreeWeights、resample等函数实现过程。
阅读全文
posted @ 2020-10-17 11:10 数星星的猫
阅读(6350)
评论(0)
推荐(0)
2020年5月26日
Linux 系统下USB端口绑定
摘要: 为保证每一次系统重启后都能操作指定的USB设备,需要对USB端口进行映射绑定。 1.$lsusb 查看端口 ID 1a86:7523 表示usb设备的ID,ID由芯片制造商设置,可以唯一表示该设备。 1a86 usb_device_descriptor.idVendor 7523 usb_devic
阅读全文
posted @ 2020-05-26 19:41 数星星的猫
阅读(2610)
评论(0)
推荐(0)
2019年11月13日
机器人底盘运动控制
摘要: 机器人底盘
阅读全文
posted @ 2019-11-13 22:24 数星星的猫
阅读(1151)
评论(0)
推荐(0)
机器人底盘
摘要: 机器人底盘程序概述 ROS运行在Ubuntu平台上,需要将控制指令传递至下位机即机器人底盘,进行运动控制,同时将底盘采集的距离、速度等传感器数据传递至上位机。下位机使用STM32作为主控,负责根据上位机指令进行运动控制,并根据上位机指令将相应的数据进行上传,上位机通过USB转TTL模块与下位机通过串
阅读全文
posted @ 2019-11-13 20:11 数星星的猫
阅读(698)
评论(0)
推荐(0)
上一页
1
2
公告
 使用奥比中光摄像头运行ORB_SLAM2 阅读全文
使用奥比中光摄像头运行ORB_SLAM2 阅读全文
使用奥比中光摄像头运行ORB_SLAM2 阅读全文
使用奥比中光摄像头运行ORB_SLAM2 阅读全文
使用奥比中光摄像头运行ORB_SLAM2 阅读全文
使用奥比中光摄像头运行ORB_SLAM2 阅读全文
 ubuntu16.04上安装cartographer,并使用数据包进行测试。 阅读全文
ubuntu16.04上安装cartographer,并使用数据包进行测试。 阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号