在ROS Kinetic上运行loam_velodyne
 LOAM原理简介,并在ROS Kinetic中使用数据包进行测试
LOAM原理简介,并在ROS Kinetic中使用数据包进行测试
-
系统框架简介
系统主要分为Lidar Odometry与Lidar Mapping 两部分,里程计部分默认以10Hz的频率计算里程计,Mapping 部分以1Hz的频率进行地图的维护。
 (1)Lidar Odometry主要部分包括:点云过滤;特征提取与分类;帧间时间补偿与运动补偿。
(1)Lidar Odometry主要部分包括:点云过滤;特征提取与分类;帧间时间补偿与运动补偿。
点云过滤:剔除无效值,并避免选择与极线方向平行的点以及存在遮挡的点,因为这两种点会导致较大的不确定性。

图(a)中的点B与(b)中的A点均应避免选取
特征提取与分类:计算曲率,根据曲率可将特征划分为corner与surface两类,并进一步细分为sharp、sharp less、flat、flat less,并将特征保存至KDtree εk+1、Hk+1。
帧间时间、运动补偿:消除由运动、帧间时间切换导致的畸变。若配有IMU,则初始pose由IMU进行预测。时间上通过时序与扫描顺序的逻辑关系进行补偿,具体实现如下。
bool halfPassed = false; float ori = -atan2(point.x, point.z); if (!halfPassed) { if (ori < startOri - M_PI / 2) { ori += 2 * M_PI; } else if (ori > startOri + M_PI * 3 / 2) { ori -= 2 * M_PI; } if (ori - startOri > M_PI) { halfPassed = true; } } else { ori += 2 * M_PI; if (ori < endOri - M_PI * 3 / 2) { ori += 2 * M_PI; } else if (ori > endOri + M_PI / 2) { ori -= 2 * M_PI; } }
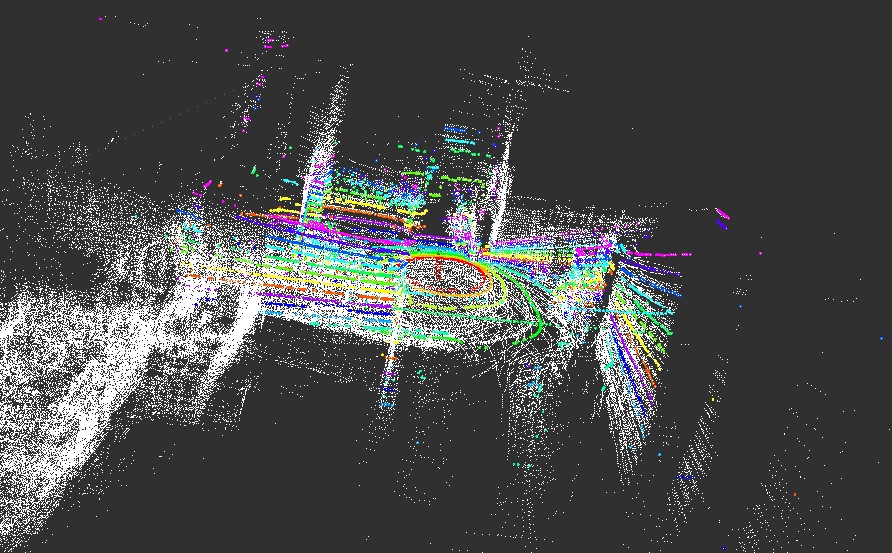
运动配准主要通过构建点到直线以及点到平面的残差项,通过高斯牛顿方法求解,迭代。若为第一帧扫描Tk+1 =0 ,若一帧扫描结束则k+1时刻的点云映射到k+2时刻,并返回tk+1 到t时刻点云的位姿变换关系Tk+1,若为一线激光扫描结束,则只返回Tk+1,具体算法如下图所示。
(2)Lidar Mapping部分以较低频率运行,每完成一帧扫描调用一次。
对corner与surface特征点基于pose进行拼接,通过五个点求点云簇的协方差矩阵的特征值和特征向量,基于ICP方法,将新的帧与submap进行配准,最后进行地图发布。
-
源码地址
https://github.com/daobilige-su/loam_velodyne
-
测试
第一个终端启动建图:
roslaunch loam_velodyne loam_velodyne.launch
第二个终端回放录制的bag数据:
rosbay play nsh_indoor_outdoor.bag -r 0.5
bag链接:https://pan.baidu.com/s/1yPn6Eyu2KRWONn5N5_WDHg 提取码:slam
-
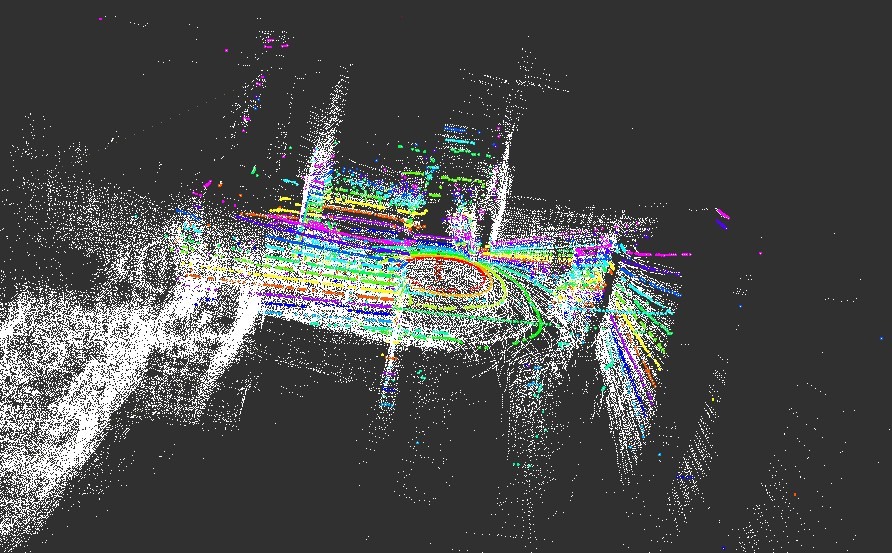
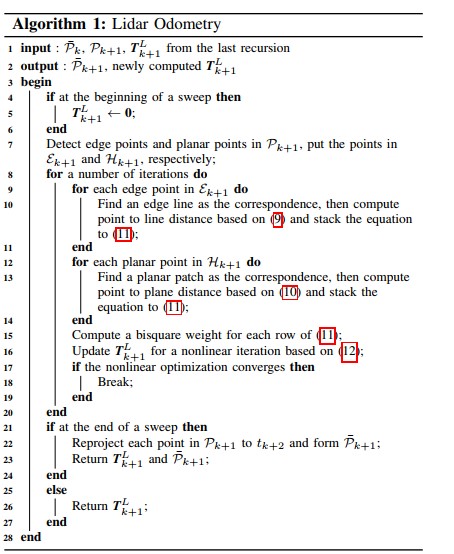
运行结果
 |
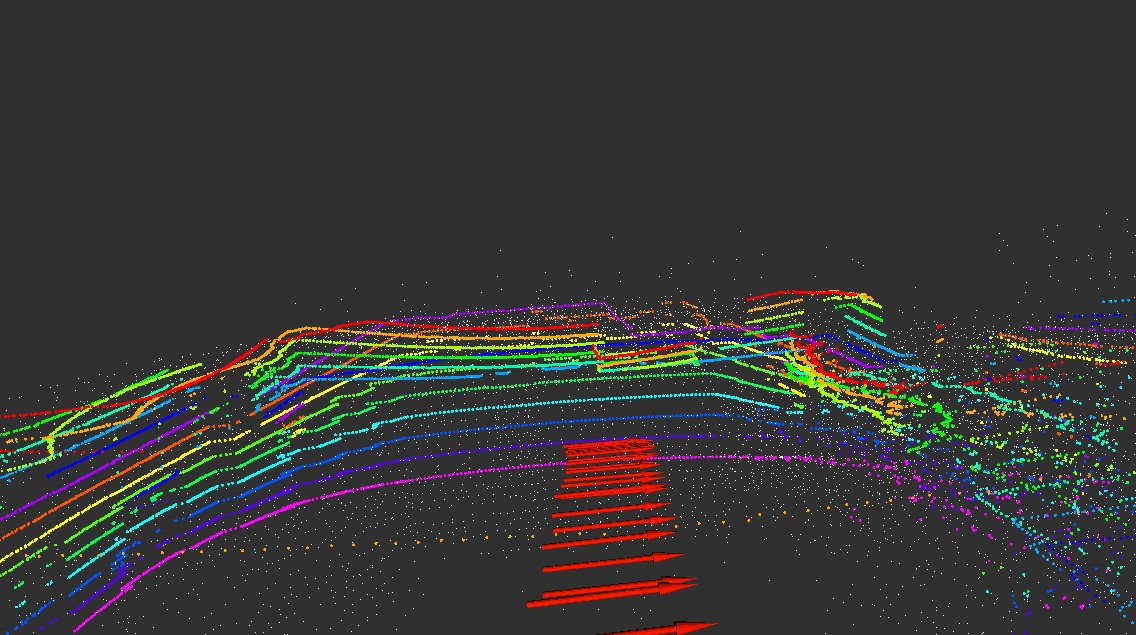 |
-
参考文献
[1] Zhang J , Singh S . LOAM: Lidar Odometry and Mapping in Real-time[C]// Robotics: Science and Systems Conference. 2014.
[2] Zhang J , Singh S . Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots, 2017, 41(2):401-416.
[3] https://zhuanlan.zhihu.com/p/57351961

 浙公网安备 33010602011771号
浙公网安备 33010602011771号