LS01D 激光雷达使用教程
1、首先通过USB线连接雷达转接板与电脑,此时转接板指示灯点亮。
2、修改端口映射,可以参考https://www.cnblogs.com/xgth/p/12968243.html
也可以用配置好的文件:https://files.cnblogs.com/files/xgth/lidar.rules.tar.gz,下载后解压放到/etc/udev/rules.d/ 目录下。内容如下:
KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", MODE:="0666", GROUP:="dialout", SYMLINK+="lidar"
重新插拔USB
ls -l /dev |grep ttyUSB查看是否生效,查看是否出现有关lidar的端口
3、下载驱动程序到工作ROS工作空间,然后使用catkin_make 编译。
(1)https://files.cnblogs.com/files/xgth/LS01D.tar.gz
(2)或是 https://github.com/leishen-lidar/LS01D.git
(3)修改launch/ls01D.launch文件,添加激光到base_link的TF,修改端口号为:/dev/lidar,(1)中已修改,修改好的内容如下:
<launch> <node name="talker" pkg="talker" type="talker"> <param name="serial_port" value="/dev/lidar"/> <param name="scan_topic" value="scan"/> <param name="laser_link" value="laser_link"/> </node> <node pkg="tf" type="static_transform_publisher" name="laser_baselink_broadcaster" args="0 0 0 0 0 0 base_link laser_link 100" /> </launch>
4、启动雷达
roslaunch talker ls01D.launch
此时激光雷达启动,开始旋转并采集数据。
5、启动rviz
订阅/scan,结果如下:

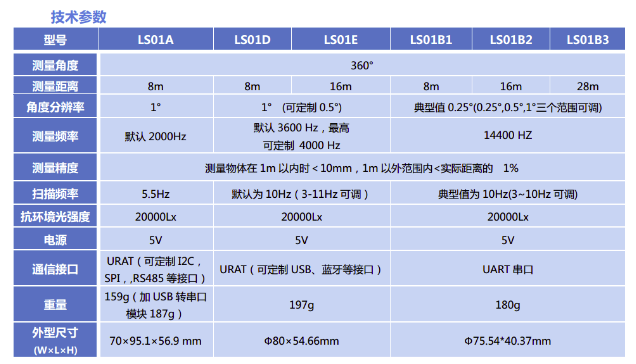
6、相关参数

 浙公网安备 33010602011771号
浙公网安备 33010602011771号