随笔分类 - ROS
摘要:1、理解 1、f(n) = g(n) + h(n) 当g(n) = 0 ,退化成gbfs 当h(n) = 0, 退化成dijkstart 2、g(n) 使用欧式距离计算,h(n)使用曼哈顿距离计算 3、使用开集合与闭集合 开集合用于保存待搜索的节点,闭集合用于存储上一轮搜索到的最小g(n) + h(
阅读全文
posted @ 2025-09-14 16:26
数星星的猫
摘要:ubuntu22.04编译ROS Motion Planning
阅读全文
摘要:Ubuntu22.04 上安装ros1 Neotic 方法
阅读全文
摘要:1、首先通过USB线连接雷达转接板与电脑,此时转接板指示灯点亮。 2、修改端口映射,可以参考https://www.cnblogs.com/xgth/p/12968243.html 也可以用配置好的文件:https://files.cnblogs.com/files/xgth/lidar.rules
阅读全文
摘要: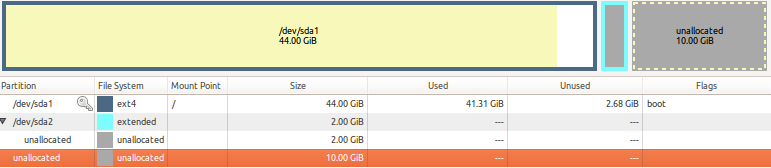 ubuntu16.04 使用gparted 扩展磁盘空间
阅读全文
ubuntu16.04 使用gparted 扩展磁盘空间
阅读全文
ubuntu16.04 使用gparted 扩展磁盘空间
阅读全文
摘要:ROS中movebase框架介绍与Navigation
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号