随笔分类 - 四足机器人+RL
从运动步态到强化学习,再到一些基本的控制算法,这里都将有所介绍和学习
摘要:1. 前言 本文对带臂机器人的运动控制任务做一个简要总结 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.1 《Versatile Multi-Contact Planning and Control for Le
阅读全文
摘要:1. 前言 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.1 yield 最开始发现于:rollout_storage.py文件下的mini_batch_generator函数: 感觉这个最外层的num_epoc
阅读全文
摘要:1.前言 比如你在Issac里训练了一个机器人行走,但是command确实已经定下来的, 我想用键盘操作要怎样??或者手柄呢?给个指令让机器人去追?? 下面我来教大家 2.正文 2.1 pygame 开多线程即可,把命令赋给play.py里面的command 我看智元机器人X1的配置文件play.p
阅读全文
摘要:1 前言 我很好奇,训练出来的模型到底是个啥? 今天直接来一探究竟。 2 正文 2.1 其实存的是网络的参数、偏置bias等: 每隔一段时间存储一次: 这是存储的信息: 好了,问题解决了。 2.2 A-C网络(非对称网络)网络结构: 然后我把网络的参数量打印出来了: 我们来计算下 Actor总参数:
阅读全文
摘要:1. 前言 这篇博客主要用于记录1111。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.1 最大的迭代次数 在on_policy_runner文件里,有learn的函数: 其中函数中: 其中num_learni
阅读全文
摘要: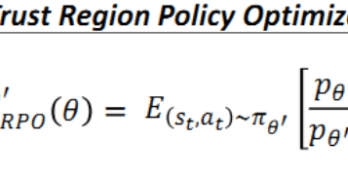 0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,
阅读全文
0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,
阅读全文
0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,
阅读全文
摘要:前言 这篇博客主要用于记录一些关于mujoco 如何安装、urdf模型如何导入以及如何进行仿真的记录的事情,特此记录,一方面便于日后自己的温故学习,另一方面也比便于大家的学习和交流。如有不对之处,欢迎评论区指出错误,你我共同进步学习! 正文 让我们安装mujoco 1、安装 安装mojoco 进行这
阅读全文
摘要: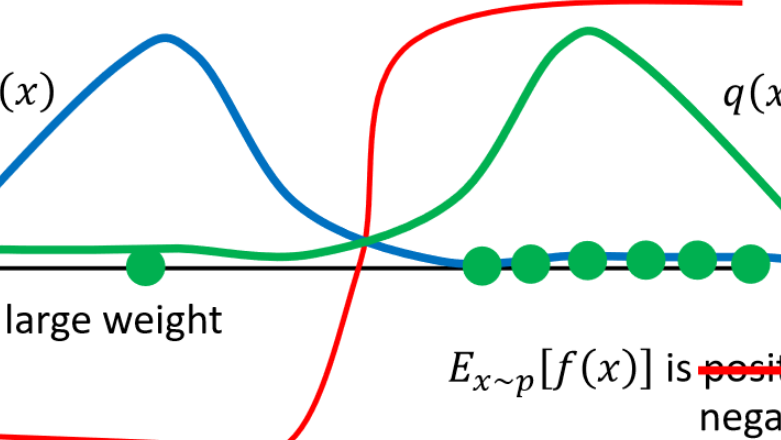 这个题图就涵盖了PPO主要的改进之处
阅读全文
这个题图就涵盖了PPO主要的改进之处
阅读全文
这个题图就涵盖了PPO主要的改进之处
阅读全文
摘要: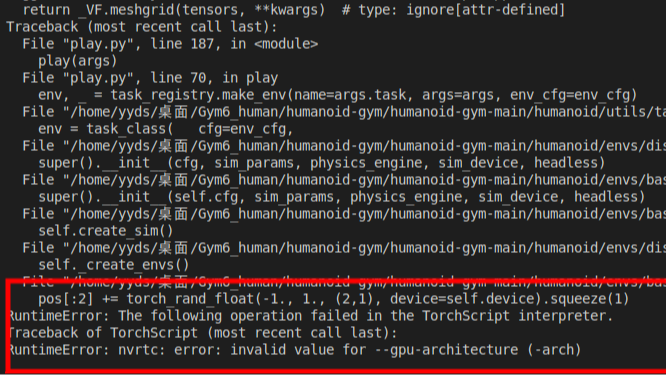 起因 一开始我什么都没干,就突然报了这么一个错误: 我震惊了,因为我以为又是cuda沙雕了,没想到网上一查,真是如此 分析 一些网上博客的解决方法 都说其实是因为pytorch的版本问题,然后重新安装之类的blablabla 我也照做了,但是,却并没有解决问题: 就在我非常狂躁之时,我发现我的输出竟
阅读全文
起因 一开始我什么都没干,就突然报了这么一个错误: 我震惊了,因为我以为又是cuda沙雕了,没想到网上一查,真是如此 分析 一些网上博客的解决方法 都说其实是因为pytorch的版本问题,然后重新安装之类的blablabla 我也照做了,但是,却并没有解决问题: 就在我非常狂躁之时,我发现我的输出竟
阅读全文
起因 一开始我什么都没干,就突然报了这么一个错误: 我震惊了,因为我以为又是cuda沙雕了,没想到网上一查,真是如此 分析 一些网上博客的解决方法 都说其实是因为pytorch的版本问题,然后重新安装之类的blablabla 我也照做了,但是,却并没有解决问题: 就在我非常狂躁之时,我发现我的输出竟
阅读全文
摘要:Deep Deterministic Policy Gradient (DDPG) 是“Deterministic”(确定性)的,因为它使用了一个确定性策略网络,而不是像传统的强化学习算法(例如,基于策略梯度的算法)那样使用随机策略网络。 具体来说,DDPG 使用的是一个确定性策略函数,通常表示为
阅读全文
摘要:Crocoddyl Crocoddyl是一个用于接触序列下机器人控制的最优控制库。它的求解器基于新颖高效的微分动态编程(DDP)算法。Crocoddyl可计算最佳轨迹和反馈增益。它使用Pinocchio快速计算机器人动力学和分析导数。 开源地址 简而言之就是一个机器人进行动力学运算的一个高效库 Pi
阅读全文
摘要:What DDIM是啥? DDIM(Denoising Diffusion Implicit Models) 是一种扩散模型的变体,旨在加速图像生成过程并保持生成质量。它是在DDPM(Denoising Diffusion Probabilistic Models)的基础上发展出来的,提供了一种更高
阅读全文
摘要:https://zhihui.lingjun.life/2020/07/02/foc/ 1.BLDC BLDC就是无刷直流电机,通过磁场: 这种,让转子转动起来,一个状态接着一个状态的转起来。 而这种换向操作就需要换向器来进行。 而无刷电机的驱动主要使用三相逆变电路来实现 而逆变电路的意思就是:把直
阅读全文
摘要:1 在solidworks中导出URDF文件 1 这里按照古月居老师的要求进行基本的配置 https://www.bilibili.com/video/BV1Tx411o7rH/?vd_source=fcddcf87e97b17fd530dc88db643aab3 关于catkin_ws这种ROS的
阅读全文
摘要:报错问题:出现了一个Nan num_envs很小的情况下没问题,一旦大于50就有nan然后被强行停止函数的运行 Traceback (most recent call last): File "train.py", line 43, in <module> train(args) File "tra
阅读全文
摘要:fraction noise minecraft perlin noise 作为一种fraction noise 跑酷 深度相机,不然被挡住不知道是要下蹲还是要跳过去 issacGym的激光雷达的模拟的不是很好。这是一个取舍 scandot来进行感知 amiwors奥秘沃斯 框架下的issac si
阅读全文
摘要:网上说的很全面了,这里我把我遇到的一些问题和解决方案罗列出来,以便未来的学习和了解。 博客的好处就体现出来了,下次你再用这个东西,就直接打开你的博客照抄就行了,不用东搜西搜了,及其方便,这种碎片化的东西,比记在笔记本或者而备忘要省事儿的多。。。 创建环境 conda create -n xxxxxx
阅读全文
摘要:1、 网上说的很全面了,这里我把我遇到的一些问题和解决方案罗列出来,以便未来的学习和了解。 博客的好处就体现出来了,下次你再用这个东西,就直接打开你的博客照抄就行了,不用东搜西搜了,及其方便,这种碎片化的东西,比记在笔记本或者而备忘要省事儿的多。。。 2 Nvidia驱动会向下兼容,所以安装最新版的
阅读全文
摘要:1 2024.10.12 14:52 Traceback (most recent call last): File "terrain_creation.py", line 119, in <module> gym.add_triangle_mesh(sim, vertices.flatten(),
阅读全文
摘要:1 下载相关文件 进入github中下载相关的文件 https://github.com/leggedrobotics/legged_gym 2 加载自己绘制的URTL文件 这个链接用来下载宇树的Go2模型机器人 https://github.com/unitreerobotics/unitree_
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号