
OpenMVG 的功能模块由若干核心库组成,本文主要介绍 image 和 numeric 两个库
1 图像库
图像库包含图像容器 Image<T>、图像IO读写函数 ReadImage() 和 WriteImage()、基本绘图操作 DrawLine()、DrawCircle() 和 DrawEllipse() 等
1.1 图像容器
Image<T> 是一个图像类泛型容器,T 代表像素类型,可以是单通道的灰度图
// 8bit and 32bit gray images Image<unsigned char> gray_img_8bit; Image<double> gray_img_32bit;
也可以是 RGB 和 RGBA 等多通道的彩色图
Image<Rgb<unsigned char>> rgb_img_8bit; // 8bit RGB Image<Rgb<double> > rgb_img_32bit; // 32bit RGB Image<Rgba<unsigned char> > rgba_img_8bit; // 8bit RGBA
Image<T> 也是一个模板类,继承自 Eigen 中的“行优先”模板类 Matrix<T, Eigen::Dynamic, Eigen::Dynamic, Eigen::RowMajor>,所谓“行优先”,指的是矩阵内元素的存储顺序
以 $A=\begin{bmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{bmatrix}$ 为例,行优先时元素在内存中的存储顺序为 1-2-3-4-5-6,列优先为 1-4-2-5-3-6
template <typename T>
class Image : public Eigen::Matrix<T, Eigen::Dynamic, Eigen::Dynamic, Eigen::RowMajor>
{
// ...
};
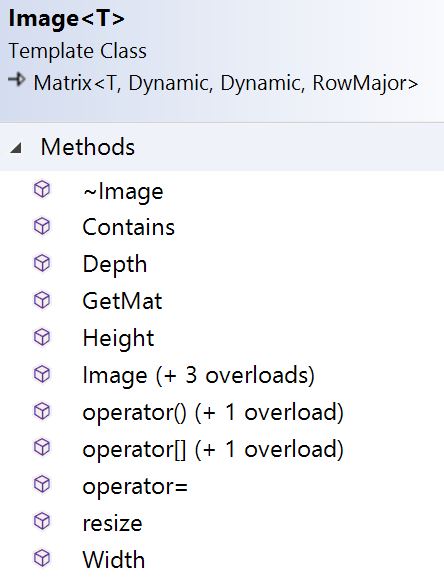
Image<T> 的完整类视图如下,包含构造函数、析构函数、运算符重载函数、获取高度(行)函数等
1.2 读写操作
图像的 IO 读写函数,使用比较简单,如下:
// Read a grayscale image
Image<unit8_t> gray_img;
bool bRet = ReadImage("Foo.imgExtension", &gray_img);
// Read a color image
Image<RGBColor> rgb_img;
bool bRet = ReadImage("Foo.imgExtension", &rgb_img);
图像 IO 读写函数的实现,稍微复杂,要根据不同的图像格式 (如 jpeg、tiff、png等),调用各自的库来实现 (如 libjpeg、libpng、libtiff 等),ReadImage() -> ReadJpg() -> ReadJpgStream() -> libjpeg
笔者刚接触图像处理时,并不知道 libjpeg 等库的存在,曾花了不少时间,尝试用 c 语言读写 jpeg 图片,现在看来是浪费了时间,并无多大的用处
在此摘录 OpenMVG 中 ReadJpgStream() 的实现代码,仅供阅读参考,希望不要投入过多精力
int ReadJpgStream(FILE * file, std::vector<unsigned char> * ptr, int * w, int * h, int * depth)
{
jpeg_decompress_struct cinfo;
struct my_error_mgr jerr;
cinfo.err = jpeg_std_error(&jerr.pub);
jerr.pub.error_exit = &jpeg_error;
if (setjmp(jerr.setjmp_buffer)) {
std::cerr << "Error JPG: Failed to decompress.";
jpeg_destroy_decompress(&cinfo);
return 0;
}
jpeg_create_decompress(&cinfo);
jpeg_stdio_src(&cinfo, file);
jpeg_read_header(&cinfo, TRUE);
jpeg_start_decompress(&cinfo);
int row_stride = cinfo.output_width * cinfo.output_components;
*h = cinfo.output_height;
*w = cinfo.output_width;
*depth = cinfo.output_components;
ptr->resize((*h)*(*w)*(*depth));
unsigned char *ptrCpy = &(*ptr)[0];
while (cinfo.output_scanline < cinfo.output_height) {
JSAMPROW scanline[1] = { ptrCpy };
jpeg_read_scanlines(&cinfo, scanline, 1);
ptrCpy += row_stride;
}
jpeg_finish_decompress(&cinfo);
jpeg_destroy_decompress(&cinfo);
return 1;
}
2 数值运算
numeric 的实现,主要是基于开源的 C++ 模板库 Eigen,它包含了线性代数的基本运算:向量、矩阵、矩阵运算等
2.1 向量和矩阵
Vec2f 和 Vec2 分别表示类型为 float 和 double 的 2d 点 (x, y)
// 2d vector using float internal format using Vec2f = Eigen::Vector2f; // 2d vector using double internal format using Vec2 = Eigen::Vector2d;
Vec3f 和 Vec3 分别表示类型为 float 和 double 的 3d 点 (x, y, z)
// 3d vector using float internal format using Vec3f =Eigen::Vector3f; // 3d vector using double internal format using Vec3 = Eigen::Vector3d;
Mat 表示一个通用的矩阵,Mat2X 是列存储形式的一组 2d 点,Mat3X 则是列存储形式的一组 3d 点
// Unconstrained matrix using double internal format using Mat = Eigen::MatrixXd; // 2xN matrix using double internal format using Mat2X = Eigen::Matrix<double, 2, Eigen::Dynamic>; // 3xN matrix using double internal format using Mat3X = Eigen::Matrix<double, 3, Eigen::Dynamic>;
2.2 奇异值分解 - SVD
SVD 将一个矩阵分解成三个矩阵的乘积 $ A_{m \times n} = UDV^T$,其中,$U_{m\times m}$ 和 $V_{n \times n}$ 都是正交矩阵, $D_{m \times n}$ 是对角矩阵
在图像的几何变换中,仿射变换可视为一个奇异值分解的过程,参见博文 OpenCV 之 图像几何变换
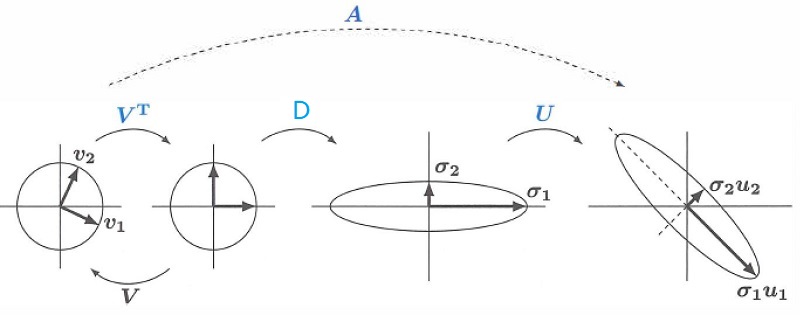
变换过程如下:
$\begin{bmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{bmatrix} = \begin{bmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{bmatrix} \begin{bmatrix} \sigma_{1} & \\ & \sigma_2 \end{bmatrix} \begin{bmatrix} \cos \phi & sin \phi \\ -\sin \phi & \cos \phi \end{bmatrix} = UDV^T$
更为形象的描述:第1个圆旋转 $V^T$得到第2个圆,再经过 $D$ 的拉伸得到第3个椭圆,最后旋转 $U$ 得到第4个椭圆
2.3 代码示例
Eigen 中的 SVD 分解:
MatrixXf A = MatrixXf(3, 2); A << -1, -0.0827, -0.737, 0.0655, 0.511, -0.562; cout << "The matrix A:" << endl << A << endl; // SVD decomposition JacobiSVD<MatrixXf> svd(A, ComputeFullU | ComputeFullV); cout << "Singular values are:" << endl << svd.singularValues() << endl; cout << "Left singular vectors U :" << endl << svd.matrixU() << endl; cout << "Right singular vectors Vt :" << endl << svd.matrixV() << endl;
OpenCV 中的 SVD 分解:SVDecomp (InputArray src, OutputArray w, OutputArray u, OutputArray vt, int flags = 0)
Mat W, U, Vt; Mat A = (Mat_<float>(3, 2) << -1, - 0.0827, -0.737, 0.0655, 0.511, -0.562); SVDecomp(A, W, U, Vt, SVD::FULL_UV);
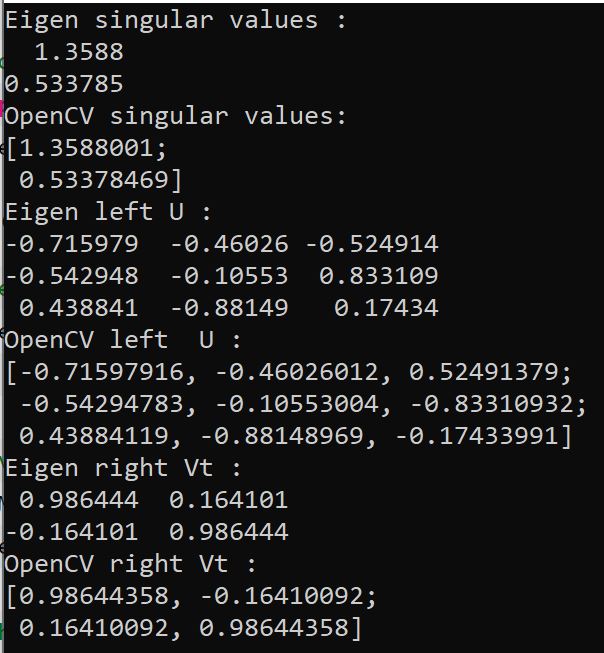
从结果来看,Eigen 和 OpenCV 的 SVD 分解,有两处细微差异:一是小数点后位数不同,二是 U 和 Vt 中,部分元素的符号不同
3 Image 与 cv::Mat
OpenCV 中也有一个表示图像容器的模板类 Mat,参见博文 OpenCV 之 Mat 类,二者的转换关系如下:
1)cv::Mat 转换为 Image (灰度图)
// cv Mat -> mvg Image
cv::Mat img_cv = cv::imread("messi.jpg", cv::IMREAD_GRAYSCALE);
Image<uint8_t> img_mvg;
img_mvg.resize(img_cv.cols, img_cv.rows);
// convert and save
cv::cv2eigen(img_cv, *(Image<uint8_t>::Base*) &img_mvg);
WriteImage("messi_mvg.jpg", img_mvg);
2)cv::Mat 转换为 Image (彩色图)
cv::Mat img_cv;
img_cv = cv::imread("messi.jpg");
Image<RGBColor> img_mvg;
img_mvg.resize(img_cv.cols, img_cv.rows);
cv::cvtColor(img_cv, img_cv, cv::COLOR_BGR2RGB);
// convert and save
memcpy(img_mvg.data(), static_cast<unsigned char*>(img_cv.data), img_cv.cols * img_cv.rows * 3);
WriteImage("messi_mvg.jpg", img_mvg);
3)Image 转换为 cv::Mat
// Read a grayscale image
Image<unsigned char> img_mvg;
bool bRet = ReadImage("messi.jpg", &img_mvg);
// mvg Image -> cv Mat
cv::Mat img_cv;
cv::eigen2cv(img_mvg.GetMat(), img_cv);
// show image
cv::imshow("messi", img_cv);
cv::waitKey();
转换后的图片结果:

参考资料
《Introduction to Linear Algebra》 7.4 The Geometry of the SVD
原文链接: http://www.cnblogs.com/xinxue/
专注于机器视觉、OpenCV、C++ 编程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号