
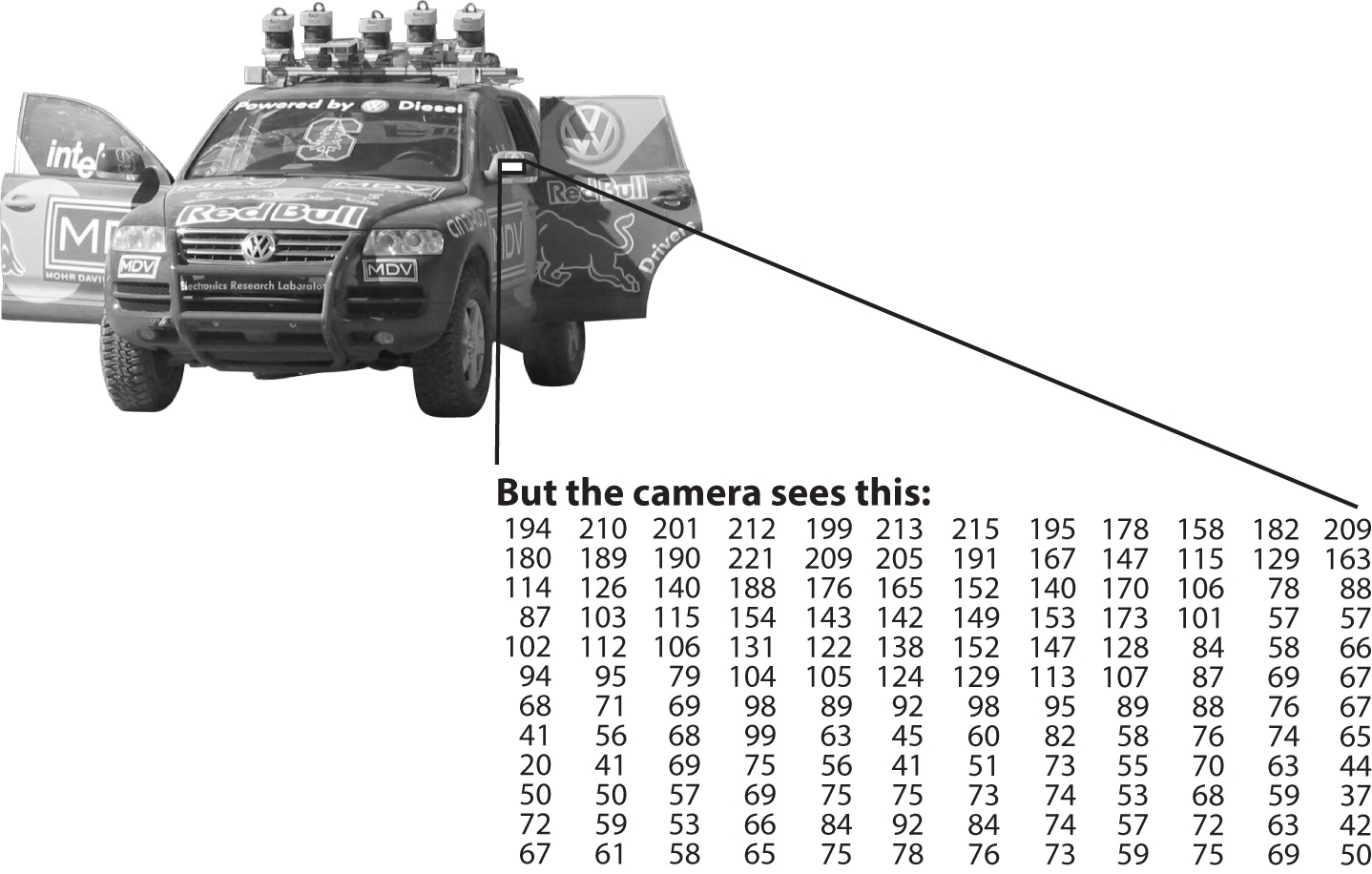
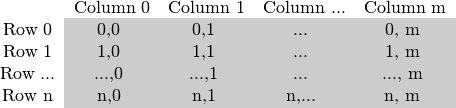
数字图像可看作一个数值矩阵, 其中的每个元素代表一个像素点,如下:
数值矩阵在 OpenCV 中用 Mat 表示,它是一种非常重要的数据结构,因为 OpenCV 中的大部分函数都和 Mat 有关:
- 有的是 Mat 的成员函数;
- 有的把 Mat 作为参数;
- 有的将 Mat 作为返回值
1 Mat 简介
Mat 表示的是 N 维稠密矩阵,与之相对的是稀疏矩阵 (只存储非零的像素值),后者常用于直方图处理中,表示为 cv::SparseMat
如下:第一个是稠密矩阵的存储方式,它存储所有的像素数值;第二个是稀疏矩阵的存储方式,它只存储非零的像素值
$\quad \begin{bmatrix} 0 & 2 & 0 \\ 1 & 0 & 1 \\ 0 & 2 & 0 \end{bmatrix} $ $\quad \begin{bmatrix} & 2 & \\ 1 & & 1 \\ & 2 & \end{bmatrix} $
当 N=1 时,所有像素存储为一行;当 N=2 时,所有像素按照一行行的顺序排列;当 N=3 时,所有像素按照一面面的顺序排列,其中一行行的像素构成一个平面。
灰度图的存储方式,如下:
RGB 图像的存储方式,如下:注意其存储顺序为 BGR (蓝-绿-红)

2 Mat 特点
2.1 组成
Mat 类包含两部分:矩阵头 (matrix header) 和 矩阵指针 (pointer to matrix),部分矩阵头如下:
int flags; // signaling the contents of the matrix
int dims; // dimensions
int rows, cols; // rows and columns
MatSize size; //
MatStep step; //
矩阵指针如下,指向包含所有像素值的矩阵
uchar* data; // pointer to the data
2.2 赋值算子
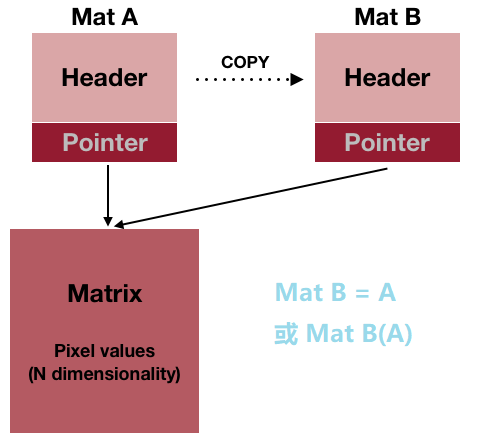
Mat 类中的赋值算子 "=" 和 拷贝构造函数,涉及的是浅拷贝,因此,当执行这两个操作时,仅仅是复制了矩阵头。
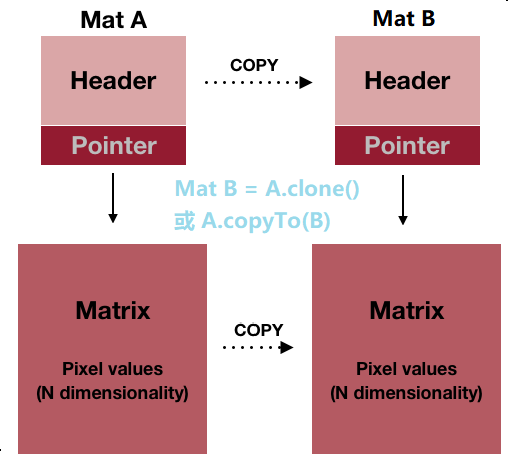
如果想要深拷贝,达到复制图像矩阵的目的,应使用 clone() 或 copyTo() 函数,如下图所示:
2.3 代码验证
新建矩阵 m1 并初始化,m1 通过 "=" 赋值给 m2,两者指向同样的数据块。因此,如果改变了 m1,则 m2 的数值,也会随之变化
新建矩阵 m3,通过 copyTo() 赋值给 m1,此时可看到,m1 和 m2 的数值同时发生了变化
Mat m1(3, 3, CV_32FC1, Scalar(1.1f) ); cout << "m1 = " << endl << " " << m1 << endl << endl; // using assign operator Mat m2 = m1; cout << "m2 = " << endl << " " << m2 << endl << endl; Mat m3(3, 3, CV_32FC1, Scalar(3.3f) ); m3.copyTo(m1); cout << "m1 = " << endl << " " << m1 << endl << endl; cout << "m2 = " << endl << " " << m2 << endl << endl;
3 Mat 创建
3.1 数据类型
在创建 Mat 之前,首先了解 Mat 中元素的数据类型,其格式为 CV_{8U, 16S, 16U, 32S, 32F, 64F}C{1, 2, 3} 或 CV_{8U, 16S, 16U, 32S, 32F, 64F}C(n)
第一个 {} 表示数据的类型:
CV_8U - 8-bit 无符号整数 ( 0..255 ) CV_8S - 8-bit 有符号整数 ( -128..127 ) CV_16U - 16-bit 无符号整数 ( 0..65535 ) CV_16S - 16-bit 有符号整数 ( -32768..32767 ) CV_32S - 32-bit 有符号整数 ( -2147483648..2147483647 ) CV_32F - 32-bit 浮点数 ( -FLT_MAX..FLT_MAX, INF, NAN ) CV_64F - 64-bit 浮点数 ( -DBL_MAX..DBL_MAX, INF, NAN )
第二个 {} 或 (n),表示的是通道:
CV_8UC3 等价于 CV_8UC(3) - 3通道 8-bit 无符号整数
3.2 创建方式
3.2.1 构造函数
直接赋值,创建一个 3 行 3 列的单位矩阵
// create a 3x3 double-precision identity matrix Mat M = (Mat_<double>(3,3) << 1, 0, 0, 0, 1, 0, 0, 0, 1);
创建一个 3 行 5 列,3 通道 32 位,浮点型的矩阵,通道 1, 2, 3 的值分别为 1.1f,2.2f,3.3f
Mat m(3, 5, CV_32FC3, Scalar(1.1f, 2.2f, 3.3f) ); cout << "m = " << endl << " " << m << endl << endl;
输出矩阵如下:

3.2.2 create 函数
使用 Mat() + create() + setTo(),也可以构建如上的数值矩阵
Mat m; // Create data area for 3 rows and 10 columns of 3-channel 32-bit floats m.create(3,5,CV_32FC3); // Set the values in the 1st channel to 1.0, the 2nd to 0.0, and the 3rd to 1.0 m.setTo(Scalar(1.1f, 2.2f,3.3f)); cout << "m = " << endl << " " << m << endl << endl;
3.2.3 特殊矩阵
单位矩阵 (ones),对角矩阵 (eye),零矩阵 (zeros),如下所示:
// 单位矩阵 Mat O = Mat::ones(3, 3, CV_32F); cout << "O = " << endl << " " << O << endl << endl; // 零矩阵 Mat Z = Mat::zeros(3, 3, CV_8UC1); cout << "Z = " << endl << " " << Z << endl << endl; // 对角矩阵 Mat E = Mat::eye(3, 3, CV_64F); cout << "E = " << endl << " " << E << endl << endl;
4 Mat 遍历
4.1 at<>() 函数
常用来遍历 Mat 元素的基本函数为 at<>(),其中 <> 内的数据类型,取决于 Mat 中元素的数据类型,二者的对应关系如下:
CV_8U -- Mat.at<uchar>(y,x) CV_8S -- Mat.at<schar>(y,x) CV_16U -- Mat.at<ushort>(y,x) CV_16S -- Mat.at<short>(y,x) CV_32S -- Mat.at<int>(y,x) CV_32F -- Mat.at<float>(y,x) CV_64F -- Mat.at<double>(y,x)
简单的遍历如下,使用了 Qt 的 qDebug() 来显示输出
Mat m1 = Mat::eye(10, 10, CV_32FC1); // use qDebug() qDebug() << "Element (3,3) is : " << m1.at<float>(3,3); Mat m2 = Mat::eye(10, 10, CV_32FC2); // use qDebug() qDebug() << "Element (3,3) is " << m2.at<cv::Vec2f>(3,3)[0] << "," << m2.at<cv::Vec2f>(3,3)[1];
注意:at<>() 函数中 () 内,行索引号在前,列索引号在后,也即 (y, x)
4.2 遍历方式
4.2.1 高效遍历
Mat& ScanImageAndReduceC(Mat& src, const uchar* const table)
{
// accept only char type matrices
CV_Assert(src.depth() == CV_8U);
int channels = src.channels();
int nRows = src.rows;
int nCols = src.cols * channels;
if (src.isContinuous())
{
nCols *= nRows;
nRows = 1;
}
int i,j;
uchar* p;
for(i=0; i<nRows; ++i)
{
p = src.ptr<uchar>(i);
for (j = 0; j<nCols; ++j)
{
p[j] = table[p[j]];
}
}
return src;
}
4.2.2 迭代器遍历
Mat& ScanImageAndReduceIterator(Mat& src, const uchar* const table)
{
// accept only char type matrices
CV_Assert(src.depth() == CV_8U);
const int channels = src.channels();
switch(channels)
{
case 1:
{
MatIterator_<uchar> it, end;
for(it=src.begin<uchar>(), end=src.end<uchar>(); it!=end; ++it)
*it = table[*it];
break;
}
case 3:
{
MatIterator_<Vec3b> it, end;
for(it=src.begin<Vec3b>(), end=src.end<Vec3b>(); it!=end; ++it)
{
(*it)[0] = table[(*it)[0]];
(*it)[1] = table[(*it)[1]];
(*it)[2] = table[(*it)[2]];
}
}
}
return src;
}
4.2.3 耗时计算
比较上面两种方法的耗时,可用如下代码:
double t = (double)getTickCount(); // do something ... t = ((double)getTickCount() - t)/getTickFrequency(); cout << "Times passed in seconds: " << t << endl;
参考资料
《Learning OpenCV3》 chapter 4
OpenCV Tutorials / The Core Functionality (core module) / Mat - The Basic Image Container
OpenCV Tutorials / The Core Functionality (core module) / How to scan images, lookup tables and time measurement with OpenCV
原文链接: http://www.cnblogs.com/xinxue/
专注于机器视觉、OpenCV、C++ 编程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号