摘要: 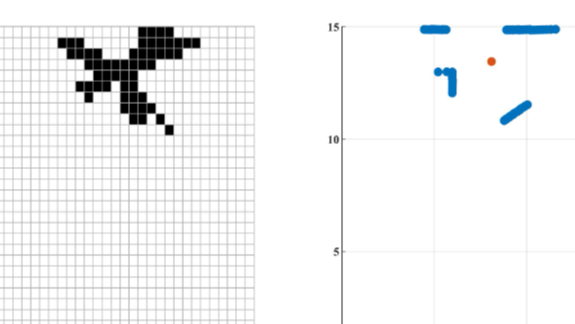 Bresenham Algorithm 为了通过雷达构建占用栅格地图,需要计算雷达扫过的障碍栅格和非障碍栅格。如下图, 于是采用\(Bresenham Algorithm\)快速计算占用栅格集合。 算法思路 首先假设两个坐标点,分别为雷达测量的起点和终点 \[(x_1,y_1),(x_2,y 阅读全文
Bresenham Algorithm 为了通过雷达构建占用栅格地图,需要计算雷达扫过的障碍栅格和非障碍栅格。如下图, 于是采用\(Bresenham Algorithm\)快速计算占用栅格集合。 算法思路 首先假设两个坐标点,分别为雷达测量的起点和终点 \[(x_1,y_1),(x_2,y 阅读全文
Bresenham Algorithm 为了通过雷达构建占用栅格地图,需要计算雷达扫过的障碍栅格和非障碍栅格。如下图, 于是采用\(Bresenham Algorithm\)快速计算占用栅格集合。 算法思路 首先假设两个坐标点,分别为雷达测量的起点和终点 \[(x_1,y_1),(x_2,y 阅读全文
posted @ 2024-03-04 17:50
DOinging
阅读(154)
评论(0)
推荐(0)
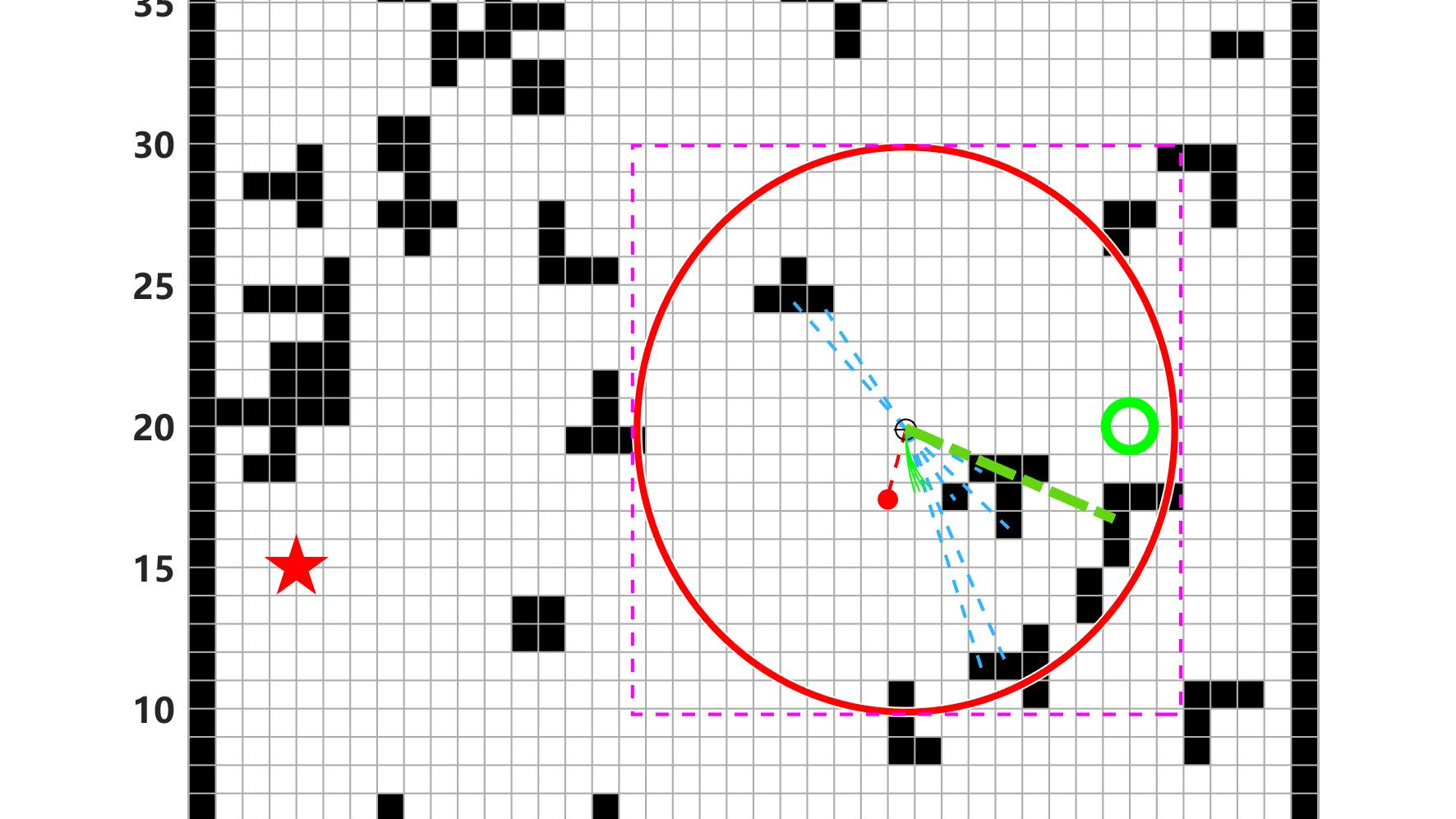 动态窗口法 运动模型建立 假设机器人的平移速度和旋转角速度可以独立地进行控制。如下图使用角速度\(\omega(t)\)、速度\(v(t)\)表示在\(t\)时刻的运动状态。 除此之外,还需要引入坐标\(x(t)\)、\(y(t)\)、\(\theta(t)\)分别表示\(t\)时刻的坐标(\(x,
动态窗口法 运动模型建立 假设机器人的平移速度和旋转角速度可以独立地进行控制。如下图使用角速度\(\omega(t)\)、速度\(v(t)\)表示在\(t\)时刻的运动状态。 除此之外,还需要引入坐标\(x(t)\)、\(y(t)\)、\(\theta(t)\)分别表示\(t\)时刻的坐标(\(x, 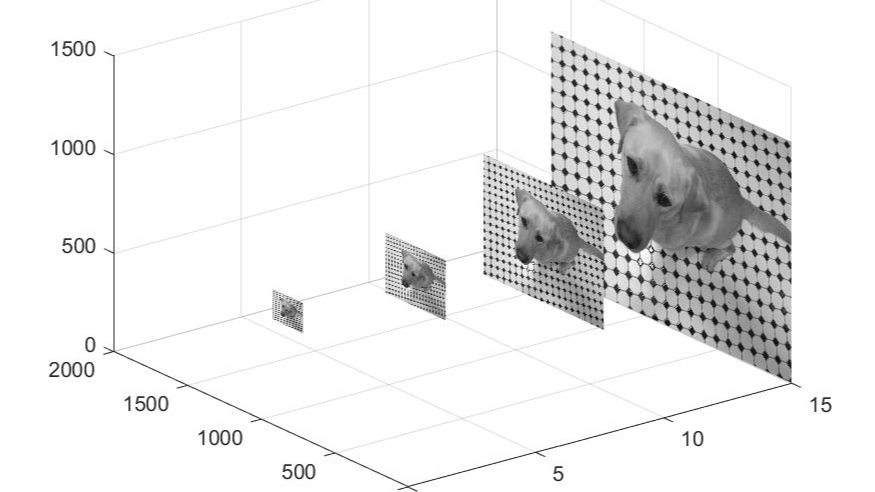 图像金字塔绘制 代码: clc clear all close all %% 初始化参数 dog = imread("kobi.png"); % 灰度化 dogGray = rgb2gray(dog); [W , H ] =size(dogGray); % 高斯图像金字塔 dogPyramid =P
图像金字塔绘制 代码: clc clear all close all %% 初始化参数 dog = imread("kobi.png"); % 灰度化 dogGray = rgb2gray(dog); [W , H ] =size(dogGray); % 高斯图像金字塔 dogPyramid =P 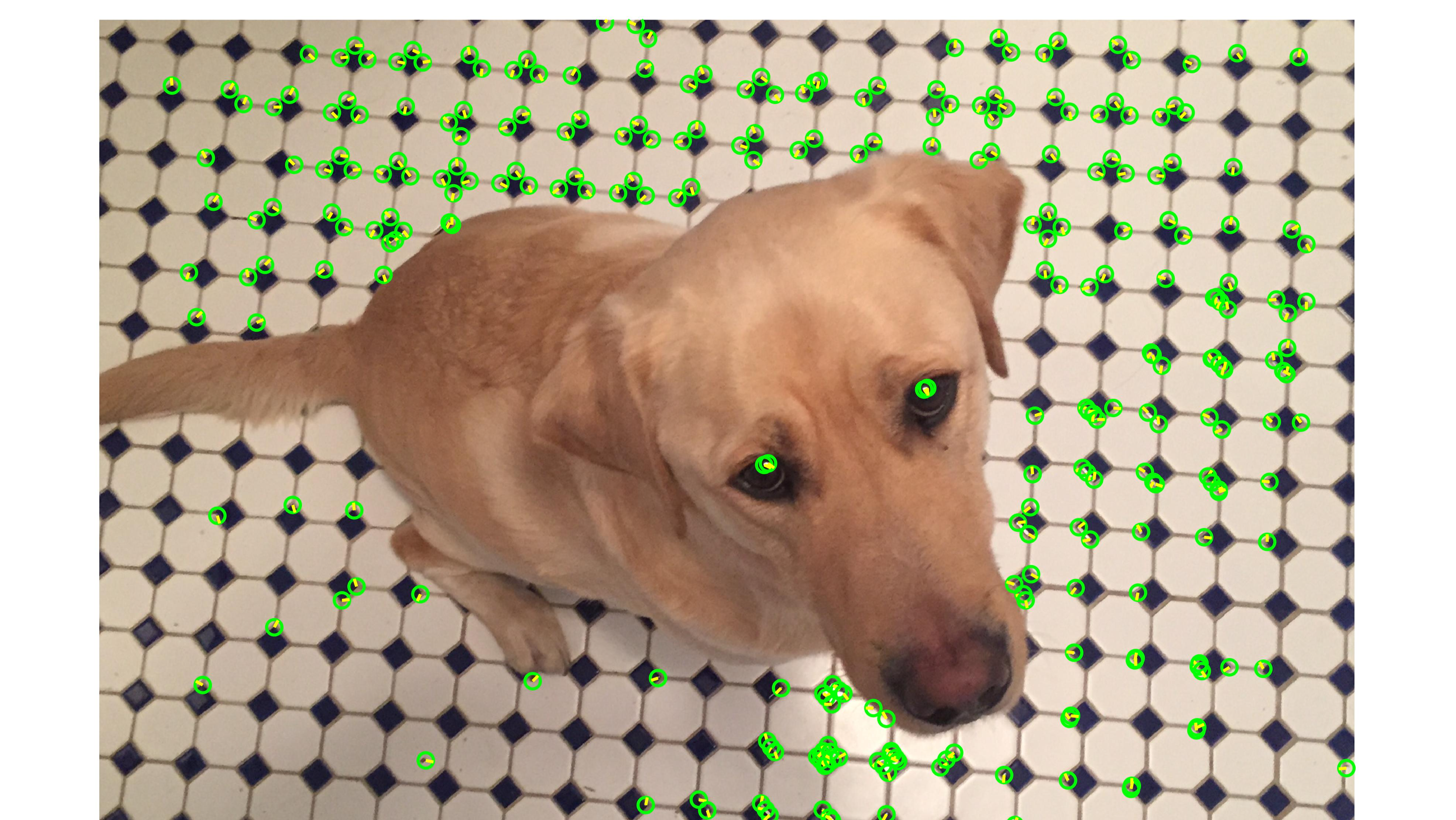 灰度质心法绘出带方向的标注圆 在给出特征点坐标及领域旋转描述后,在对应位置画圆,并根据旋转信息画出有方向的半径效果如下 clc clear all close all %% 初始化参数 dog = imread("kobi.png"); % 灰度化 dogGray = rgb2gray(dog);
灰度质心法绘出带方向的标注圆 在给出特征点坐标及领域旋转描述后,在对应位置画圆,并根据旋转信息画出有方向的半径效果如下 clc clear all close all %% 初始化参数 dog = imread("kobi.png"); % 灰度化 dogGray = rgb2gray(dog);  FAST角点检测离散圆形扫描 目的是扫描离散圆内所有点,计算灰度质心, 过程为小半径到大半径极坐标形式扫描,最终如下,对圆内所有坐标进行扫描 代码: clc clear all close all %% 初始化参数 % 正方形绘图边长 Side = 11; %当前扫描坐标 current = zer
FAST角点检测离散圆形扫描 目的是扫描离散圆内所有点,计算灰度质心, 过程为小半径到大半径极坐标形式扫描,最终如下,对圆内所有坐标进行扫描 代码: clc clear all close all %% 初始化参数 % 正方形绘图边长 Side = 11; %当前扫描坐标 current = zer  浙公网安备 33010602011771号
浙公网安备 33010602011771号