摘要: 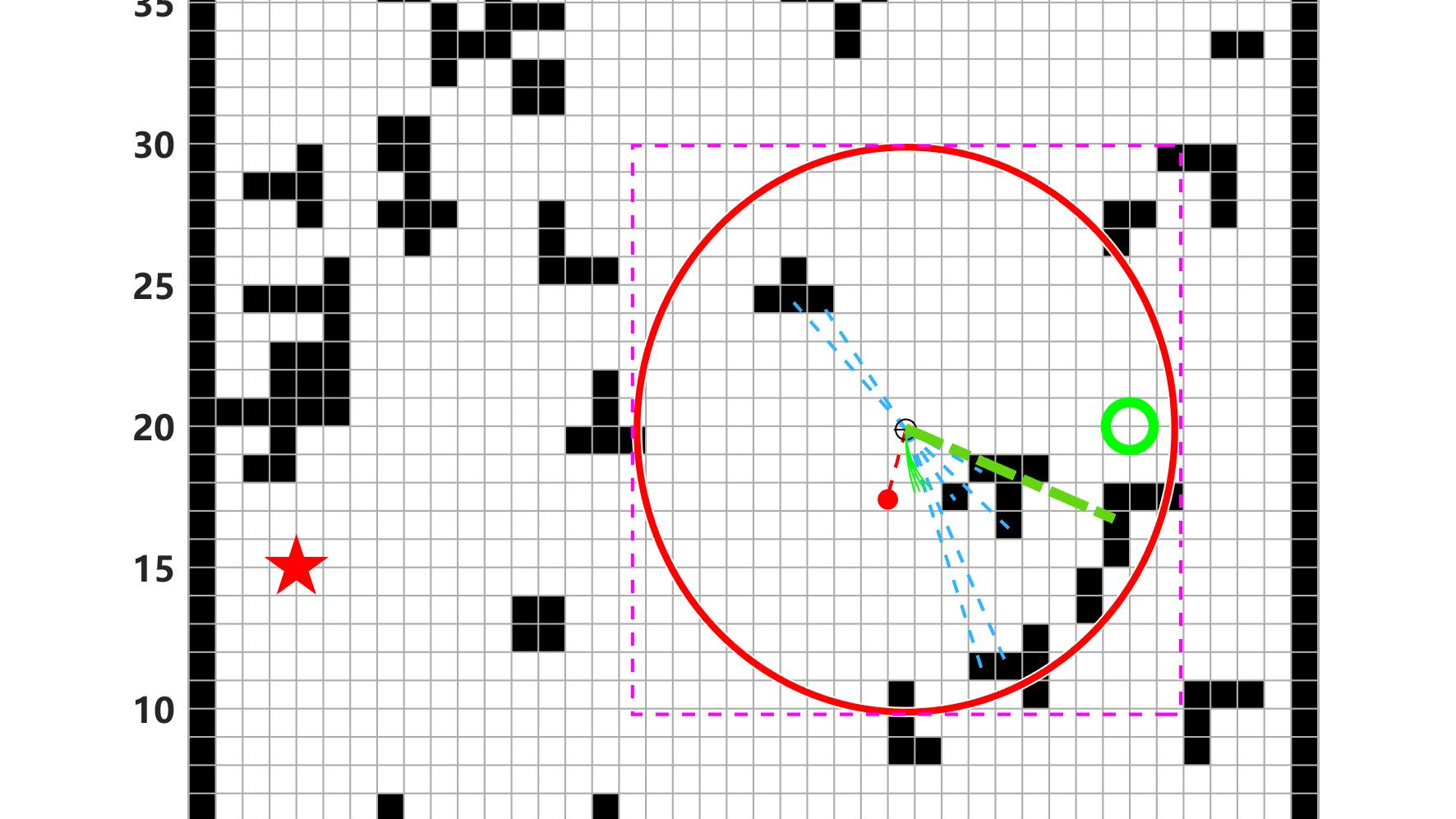 动态窗口法 运动模型建立 假设机器人的平移速度和旋转角速度可以独立地进行控制。如下图使用角速度\(\omega(t)\)、速度\(v(t)\)表示在\(t\)时刻的运动状态。 除此之外,还需要引入坐标\(x(t)\)、\(y(t)\)、\(\theta(t)\)分别表示\(t\)时刻的坐标(\(x, 阅读全文
动态窗口法 运动模型建立 假设机器人的平移速度和旋转角速度可以独立地进行控制。如下图使用角速度\(\omega(t)\)、速度\(v(t)\)表示在\(t\)时刻的运动状态。 除此之外,还需要引入坐标\(x(t)\)、\(y(t)\)、\(\theta(t)\)分别表示\(t\)时刻的坐标(\(x, 阅读全文
动态窗口法 运动模型建立 假设机器人的平移速度和旋转角速度可以独立地进行控制。如下图使用角速度\(\omega(t)\)、速度\(v(t)\)表示在\(t\)时刻的运动状态。 除此之外,还需要引入坐标\(x(t)\)、\(y(t)\)、\(\theta(t)\)分别表示\(t\)时刻的坐标(\(x, 阅读全文
posted @ 2024-02-24 14:10
DOinging
阅读(634)
评论(0)
推荐(0)
 浙公网安备 33010602011771号
浙公网安备 33010602011771号