随笔分类 - Hugging Face 博客
摘要: 继我们使用 Claude Code 训练开源模型的项目之后,现在我们更进一步,将 Codex 引入这一流程。这里的重点不是“Codex 自己开源模型”,而是让 Codex 作为编码代理,参与并自动化开源模型的训练、评估与发布全流程。为此,我们为 Codex 接入了 Hugging Face Skil
阅读全文
继我们使用 Claude Code 训练开源模型的项目之后,现在我们更进一步,将 Codex 引入这一流程。这里的重点不是“Codex 自己开源模型”,而是让 Codex 作为编码代理,参与并自动化开源模型的训练、评估与发布全流程。为此,我们为 Codex 接入了 Hugging Face Skil
阅读全文
继我们使用 Claude Code 训练开源模型的项目之后,现在我们更进一步,将 Codex 引入这一流程。这里的重点不是“Codex 自己开源模型”,而是让 Codex 作为编码代理,参与并自动化开源模型的训练、评估与发布全流程。为此,我们为 Codex 接入了 Hugging Face Skil
阅读全文
摘要: 在这篇博客文章中,我们介绍了“语音同意验证机制 (voice consent gate)”的概念,支持通过明确同意来进行语音克隆。我们还提供了一个 示例 Space 应用 和 相关代码,帮助大家快速上手这一想法。 近年来,逼真的语音生成技术已经达到了令人惊讶的水平。在某些情况下,生成出来的合成语音几
阅读全文
在这篇博客文章中,我们介绍了“语音同意验证机制 (voice consent gate)”的概念,支持通过明确同意来进行语音克隆。我们还提供了一个 示例 Space 应用 和 相关代码,帮助大家快速上手这一想法。 近年来,逼真的语音生成技术已经达到了令人惊讶的水平。在某些情况下,生成出来的合成语音几
阅读全文
在这篇博客文章中,我们介绍了“语音同意验证机制 (voice consent gate)”的概念,支持通过明确同意来进行语音克隆。我们还提供了一个 示例 Space 应用 和 相关代码,帮助大家快速上手这一想法。 近年来,逼真的语音生成技术已经达到了令人惊讶的水平。在某些情况下,生成出来的合成语音几
阅读全文
摘要: 快速了解(TLDR) 现在只需一行代码,就能通过 load_dataset('dataset', streaming=True) 以流式方式加载数据集,无需下载! 无需复杂配置、不占磁盘空间、不再担心 “磁盘已满” 或 429 请求过多错误,立即开始训练 TB 级数据集! 性能非常强劲:在 64×H
阅读全文
快速了解(TLDR) 现在只需一行代码,就能通过 load_dataset('dataset', streaming=True) 以流式方式加载数据集,无需下载! 无需复杂配置、不占磁盘空间、不再担心 “磁盘已满” 或 429 请求过多错误,立即开始训练 TB 级数据集! 性能非常强劲:在 64×H
阅读全文
快速了解(TLDR) 现在只需一行代码,就能通过 load_dataset('dataset', streaming=True) 以流式方式加载数据集,无需下载! 无需复杂配置、不占磁盘空间、不再担心 “磁盘已满” 或 429 请求过多错误,立即开始训练 TB 级数据集! 性能非常强劲:在 64×H
阅读全文
摘要: 在飞速变化的研究世界中,紧跟最新进展至关重要。为帮助开发者与研究人员把握 人工智能 前沿动态,我们推出了 Daily Papers 页面。自上线以来,Daily Papers 已收录超过 1 万 篇由 AK 与社区研究者精选的高质量论文。 不过,许多朋友可能还没有充分体验 Daily Papers
阅读全文
在飞速变化的研究世界中,紧跟最新进展至关重要。为帮助开发者与研究人员把握 人工智能 前沿动态,我们推出了 Daily Papers 页面。自上线以来,Daily Papers 已收录超过 1 万 篇由 AK 与社区研究者精选的高质量论文。 不过,许多朋友可能还没有充分体验 Daily Papers
阅读全文
在飞速变化的研究世界中,紧跟最新进展至关重要。为帮助开发者与研究人员把握 人工智能 前沿动态,我们推出了 Daily Papers 页面。自上线以来,Daily Papers 已收录超过 1 万 篇由 AK 与社区研究者精选的高质量论文。 不过,许多朋友可能还没有充分体验 Daily Papers
阅读全文
摘要:我们在这篇文章中新增了 Chandra 和 OlmOCR-2,并附上了它们在 OlmOCR 基准上的得分 🫡 摘要: 强大的视觉语言模型 (Vision-Language Models, VLMs) 的崛起,正在彻底改变文档智能 (Document AI) 的格局。每种模型都有其独特的优势,因此选
阅读全文
摘要:我们非常高兴地宣布,LeRobot 迎来一系列重大升级,让开源的机器人学习比以往更强大、更可扩展、也更易用!从重构的数据集到灵活的编辑工具、新的仿真环境,以及面向硬件的全新插件系统,LeRobot 正在持续演进,以满足前沿具身智能 (Embodied AI) 不断发展的需求。 简要总结 LeRobo
阅读全文
摘要: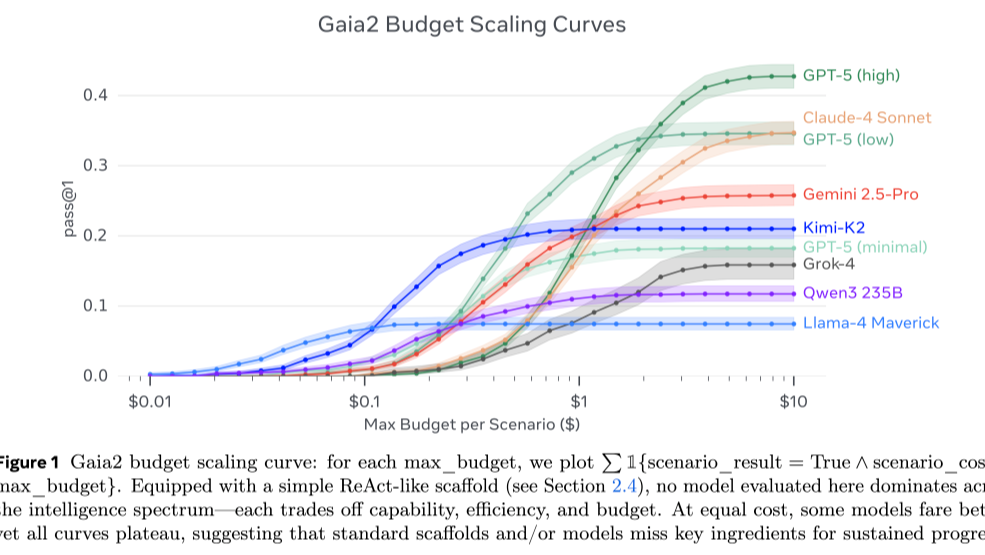 在理想情况下,AI 智能体应当是可靠的助手。当接收到任务时,它们能够轻松处理指令中的歧义,构建逐步执行的计划,正确识别所需资源,按计划执行而不被干扰,并在突发事件中灵活适应,同时保持准确性,避免幻觉。 然而,开发智能体并测试这些行为并非易事:如果你曾尝试过调试自己的智能体,可能会体会到其中的繁琐和挫
阅读全文
在理想情况下,AI 智能体应当是可靠的助手。当接收到任务时,它们能够轻松处理指令中的歧义,构建逐步执行的计划,正确识别所需资源,按计划执行而不被干扰,并在突发事件中灵活适应,同时保持准确性,避免幻觉。 然而,开发智能体并测试这些行为并非易事:如果你曾尝试过调试自己的智能体,可能会体会到其中的繁琐和挫
阅读全文
在理想情况下,AI 智能体应当是可靠的助手。当接收到任务时,它们能够轻松处理指令中的歧义,构建逐步执行的计划,正确识别所需资源,按计划执行而不被干扰,并在突发事件中灵活适应,同时保持准确性,避免幻觉。 然而,开发智能体并测试这些行为并非易事:如果你曾尝试过调试自己的智能体,可能会体会到其中的繁琐和挫
阅读全文
摘要:ZeroGPU 让任何人都能在 Hugging Face Spaces 中使用强大的 Nvidia H200 硬件,而不需要因为空闲流量而长期占用 GPU。 它高效、灵活,非常适合演示,不过需要注意的是,ZeroGPU 并不能在所有场景下完全发挥 GPU 与 CUDA 栈的全部潜能,比如生成图像或视
阅读全文
摘要:欢迎 GPT OSS —— 来自 OpenAI 的全新开放模型家族! GPT OSS 是 OpenAI 推出的 重量级开放模型,面向强推理、智能体任务以及多样化开发场景。该系列包含两款模型:拥有 117B 参数的 gpt‑oss‑120b 和拥有 21B 参数的 gpt‑oss‑20b。二者皆采用
阅读全文
摘要: 我们的 LeRobot 项目又有了新动作 - HopeJR 正式开源! HopeJR 是一款拥有 23 自由度的开源仿生机械臂系统🦾,支持遥操作控制,具备完成复杂任务的能力,适用于科研与开发场景。整个机械臂用 3D 打印即可完成构建,硬件成本仅约 500 欧元!点击这里查看演示视频。 亮点 23
阅读全文
我们的 LeRobot 项目又有了新动作 - HopeJR 正式开源! HopeJR 是一款拥有 23 自由度的开源仿生机械臂系统🦾,支持遥操作控制,具备完成复杂任务的能力,适用于科研与开发场景。整个机械臂用 3D 打印即可完成构建,硬件成本仅约 500 欧元!点击这里查看演示视频。 亮点 23
阅读全文
我们的 LeRobot 项目又有了新动作 - HopeJR 正式开源! HopeJR 是一款拥有 23 自由度的开源仿生机械臂系统🦾,支持遥操作控制,具备完成复杂任务的能力,适用于科研与开发场景。整个机械臂用 3D 打印即可完成构建,硬件成本仅约 500 欧元!点击这里查看演示视频。 亮点 23
阅读全文
摘要: AIGC热点大赛# 由 Hugging Face × OpenMMLab × ModelScope × 知乎 × 机智流等 联合发起的【AI Insight Talk】系列直播活动第三场即将开始! AI 科学家时代正加速到来,但科研智能体真的做好准备了吗?真实科研场景中,多模态智能体能否在推理、规划
阅读全文
AIGC热点大赛# 由 Hugging Face × OpenMMLab × ModelScope × 知乎 × 机智流等 联合发起的【AI Insight Talk】系列直播活动第三场即将开始! AI 科学家时代正加速到来,但科研智能体真的做好准备了吗?真实科研场景中,多模态智能体能否在推理、规划
阅读全文
AIGC热点大赛# 由 Hugging Face × OpenMMLab × ModelScope × 知乎 × 机智流等 联合发起的【AI Insight Talk】系列直播活动第三场即将开始! AI 科学家时代正加速到来,但科研智能体真的做好准备了吗?真实科研场景中,多模态智能体能否在推理、规划
阅读全文
摘要: Reachy Mini 是一款富有表现力的开源机器人,专为人机交互、创意编程和 AI 实验而设计。它价格亲民,体积小巧,却蕴藏着无限可能。无论年龄大小,全球的 AI 开发者都可以通过它共同编程、学习与分享。Reachy Mini 完全支持 Python 编程(并即将支持 JavaScript 和 S
阅读全文
Reachy Mini 是一款富有表现力的开源机器人,专为人机交互、创意编程和 AI 实验而设计。它价格亲民,体积小巧,却蕴藏着无限可能。无论年龄大小,全球的 AI 开发者都可以通过它共同编程、学习与分享。Reachy Mini 完全支持 Python 编程(并即将支持 JavaScript 和 S
阅读全文
Reachy Mini 是一款富有表现力的开源机器人,专为人机交互、创意编程和 AI 实验而设计。它价格亲民,体积小巧,却蕴藏着无限可能。无论年龄大小,全球的 AI 开发者都可以通过它共同编程、学习与分享。Reachy Mini 完全支持 Python 编程(并即将支持 JavaScript 和 S
阅读全文
摘要: 随着人工智能正在重塑从教育到国防的方方面面,数字主权已不再是一个长期的愿景,而是一个迫在眉睫的现实需求。 为了确保各国能够对影响其社会的人工智能系统进行治理、审核和建设,开源人工智能正成为实现自主可控、激发本土创新、重建公众信任的关键支柱。 什么是数字主权? 数字主权是指一个国家或地区具备能力,依据
阅读全文
随着人工智能正在重塑从教育到国防的方方面面,数字主权已不再是一个长期的愿景,而是一个迫在眉睫的现实需求。 为了确保各国能够对影响其社会的人工智能系统进行治理、审核和建设,开源人工智能正成为实现自主可控、激发本土创新、重建公众信任的关键支柱。 什么是数字主权? 数字主权是指一个国家或地区具备能力,依据
阅读全文
随着人工智能正在重塑从教育到国防的方方面面,数字主权已不再是一个长期的愿景,而是一个迫在眉睫的现实需求。 为了确保各国能够对影响其社会的人工智能系统进行治理、审核和建设,开源人工智能正成为实现自主可控、激发本土创新、重建公众信任的关键支柱。 什么是数字主权? 数字主权是指一个国家或地区具备能力,依据
阅读全文
摘要: nanoVLM 是使用纯 PyTorch 训练 你自己的视觉语言模型 (VLM) 的 最简单 方式。它是一个轻量级 工具包 ,让你可以在 免费的 Colab Notebook 上启动 VLM 训练。 我们受到了 Andrej Karpathy 的 nanoGPT 的启发,为视觉领域提供了一个类似的项
阅读全文
nanoVLM 是使用纯 PyTorch 训练 你自己的视觉语言模型 (VLM) 的 最简单 方式。它是一个轻量级 工具包 ,让你可以在 免费的 Colab Notebook 上启动 VLM 训练。 我们受到了 Andrej Karpathy 的 nanoGPT 的启发,为视觉领域提供了一个类似的项
阅读全文
nanoVLM 是使用纯 PyTorch 训练 你自己的视觉语言模型 (VLM) 的 最简单 方式。它是一个轻量级 工具包 ,让你可以在 免费的 Colab Notebook 上启动 VLM 训练。 我们受到了 Andrej Karpathy 的 nanoGPT 的启发,为视觉领域提供了一个类似的项
阅读全文
摘要: 🧭 TL;DR 今天,我们介绍了 SmolVLA,这是一个轻量级 (450M 参数) 的开源视觉 - 语言 - 动作 (VLA) 模型,专为机器人领域设计,并且可以在消费级硬件上运行。 仅使用开源社区共享的数据集进行预训练,数据集标签为 lerobot。 SmolVLA-450M 的表现优于许多更
阅读全文
🧭 TL;DR 今天,我们介绍了 SmolVLA,这是一个轻量级 (450M 参数) 的开源视觉 - 语言 - 动作 (VLA) 模型,专为机器人领域设计,并且可以在消费级硬件上运行。 仅使用开源社区共享的数据集进行预训练,数据集标签为 lerobot。 SmolVLA-450M 的表现优于许多更
阅读全文
🧭 TL;DR 今天,我们介绍了 SmolVLA,这是一个轻量级 (450M 参数) 的开源视觉 - 语言 - 动作 (VLA) 模型,专为机器人领域设计,并且可以在消费级硬件上运行。 仅使用开源社区共享的数据集进行预训练,数据集标签为 lerobot。 SmolVLA-450M 的表现优于许多更
阅读全文
摘要:🌟 欢迎参加 Gradio & MCP 智能体主题黑客松! 准备好了吗?一场以智能体(Agent)和模型上下文协议(Model Context Protocol,简称 MCP)为核心的全球在线黑客松即将来袭! 本次活动由 Hugging Face 举办,我们将共同探索基于 Anthropic MC
阅读全文
摘要: 这是 大模型评估排障指南 系列文章的第三篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 假设你读了一篇最近的新模型技术报告,然后心血来潮想要在本机复现他们的结果,却发现根本没法复现,这是为什么? 让我们来探讨一下原因。 代码库不同 要想复现论文或报告的评估得分并
阅读全文
这是 大模型评估排障指南 系列文章的第三篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 假设你读了一篇最近的新模型技术报告,然后心血来潮想要在本机复现他们的结果,却发现根本没法复现,这是为什么? 让我们来探讨一下原因。 代码库不同 要想复现论文或报告的评估得分并
阅读全文
这是 大模型评估排障指南 系列文章的第三篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 假设你读了一篇最近的新模型技术报告,然后心血来潮想要在本机复现他们的结果,却发现根本没法复现,这是为什么? 让我们来探讨一下原因。 代码库不同 要想复现论文或报告的评估得分并
阅读全文
摘要: 这是 大模型评估排障指南 系列文章的第二篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 解析 LaTeX 很难。这个问题在评估输出为 \(\LaTeX\) 的模型时经常会遇到,例如 Hugging Face 的 数学评估基准。 这个基准使用 \(\LaTeX\)
阅读全文
这是 大模型评估排障指南 系列文章的第二篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 解析 LaTeX 很难。这个问题在评估输出为 \(\LaTeX\) 的模型时经常会遇到,例如 Hugging Face 的 数学评估基准。 这个基准使用 \(\LaTeX\)
阅读全文
这是 大模型评估排障指南 系列文章的第二篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 解析 LaTeX 很难。这个问题在评估输出为 \(\LaTeX\) 的模型时经常会遇到,例如 Hugging Face 的 数学评估基准。 这个基准使用 \(\LaTeX\)
阅读全文
摘要: Hugging Face Hub 已成为 AI 协作的核心平台,托管了数万个模型、数据集以及交互式应用程序 (Space)。 在开放生态系统中,用户知情同意的管理方式与那些更 "数据饥渴" 的科技公司的封闭产品截然不同。本文将通过分析 Hugging Face Hub 平台,探讨由官方主导项目与社区
阅读全文
Hugging Face Hub 已成为 AI 协作的核心平台,托管了数万个模型、数据集以及交互式应用程序 (Space)。 在开放生态系统中,用户知情同意的管理方式与那些更 "数据饥渴" 的科技公司的封闭产品截然不同。本文将通过分析 Hugging Face Hub 平台,探讨由官方主导项目与社区
阅读全文
Hugging Face Hub 已成为 AI 协作的核心平台,托管了数万个模型、数据集以及交互式应用程序 (Space)。 在开放生态系统中,用户知情同意的管理方式与那些更 "数据饥渴" 的科技公司的封闭产品截然不同。本文将通过分析 Hugging Face Hub 平台,探讨由官方主导项目与社区
阅读全文
摘要: 这是 大模型评估排障指南 系列文章的第一篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 模型运行非常慢怎么办? 调整 batch size 如果你想要评估结果完全可复现 (在特定的输入 prompt 和硬件条件下),你可以把 batch size 可以设为 1。
阅读全文
这是 大模型评估排障指南 系列文章的第一篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 模型运行非常慢怎么办? 调整 batch size 如果你想要评估结果完全可复现 (在特定的输入 prompt 和硬件条件下),你可以把 batch size 可以设为 1。
阅读全文
这是 大模型评估排障指南 系列文章的第一篇,敬请关注系列文章: 关于推理 关于 \(\LaTeX\) 公式解析 关于可复现性 模型运行非常慢怎么办? 调整 batch size 如果你想要评估结果完全可复现 (在特定的输入 prompt 和硬件条件下),你可以把 batch size 可以设为 1。
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号