Games202笔记:环境光照(Environment Lighting)
回顾
环境光照(Environment Lighting),用一张图记录,在场景中任意方向都能看到的光照.
隐含概念:光照都是无限远的.
存储方式:球面贴图(Spherical Map),立方体贴图(Cube Map).
来自环境光照的着色
给定环境光照,如果不考虑遮挡、阴影,如何计算shading(着色)?
答:这种操作,工业界有个非正式名称IBL(Image-Based Lighting,基于图像的照明).
给定光照下,任何物体上任何一个shading point,如何得到其颜色值?
自然想到解渲染方程(rendering equation).
由于光照来自各个方向,因此不再考虑可见性\(V(p,\omega_i)\).
蒙特卡洛积分法
通用解法:蒙特卡洛积分(Monte Carlo integration)
特点:
1)任何有限区间积分,都能用蒙特卡洛积分,用采样数据做数值上的近似.
2)需要大量的样本,才能让结果接近期望值.
所以,该方法会非常慢,并非首选方法.
经典近似法
-
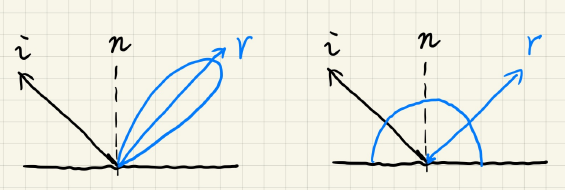
如果BRDF是glossy,对应glossy材质,说明BRDF的积分域很小(small support);
-
如果BRDF是diffuse,对应diffuse材质,说明BRDF平滑,也就是说其值变化不大.
如果满足上面2个条件之一,对应:
1)积分域\(Ω\)很小;
2)g(x)变化很小,
就能将被积函数拆开. 参见Games202笔记:实时阴影(RTR Shadow) 实时渲染中的数学
其中,\(Ω_G\)代表g函数有值的范围.
因此,可将环境光照的渲染方程拆分:
注意区分实时阴影的渲染方程:
于是,可以分2部分对\(L_o(p,\omega_o)\)求解,每个部分都能用Split Sum求和.
Split Sum第一项
预滤波环境光求\(L_i(p,\omega_i)\).
对环境光做预滤波(prefiltering). 所谓滤波,就是模糊,是将像素周围几个点加起来做平均写回原位置.
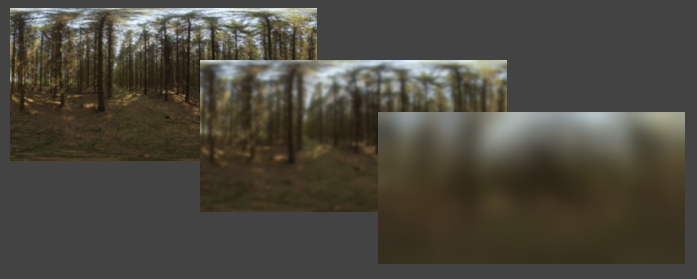
根据原有的环境光照贴图,预生成一组包含多个层级(不同大小)的环境光照贴图,为Split Sum的光照项(Lighting Term)提供数据支持.
如果filter size位于2个层级之间,可以做三线性插值(trilinear interp).
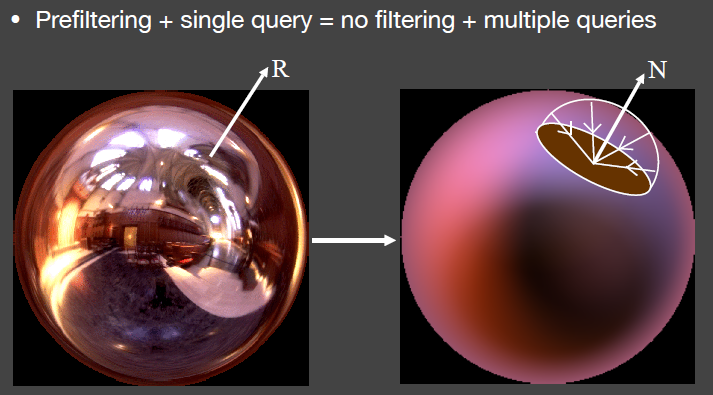
为什么要做prefiltering?
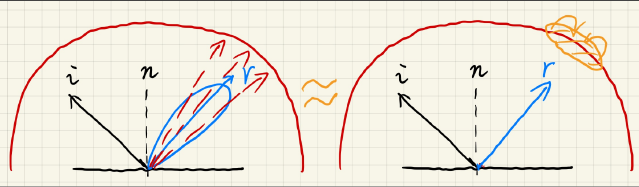
1)如果不做prefiltering,那么需要对glossy反射区域中对反射光线做采样,才能得到最终shading point值;
2)先做prefiltering,对反射区域的反射光线已经做了模糊处理,于是可以直接取镜面反射
注意:prefiltering需要在反射方向r对应的球面区域进行.
Split Sum第二项
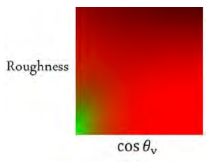
预计算求\(\int_{Ω^+}f_r(p,\omega_i,\omega_o)cos \theta_i d\omega_i\).
如何求出后面一半这部分,而避免求积分(采样)?
答:预计算所有变量组合的值,针对粗糙度、颜色(菲涅尔项)等参数. 但是,如果直接构建涵盖所有参数组合的查找表,将导致超高维度的数据存储.
为求这部分积分的值,先回顾微表面(Microsurface)BRDF.
微表面BRDF,可参见计算机图形:材质和外观 微表面材质
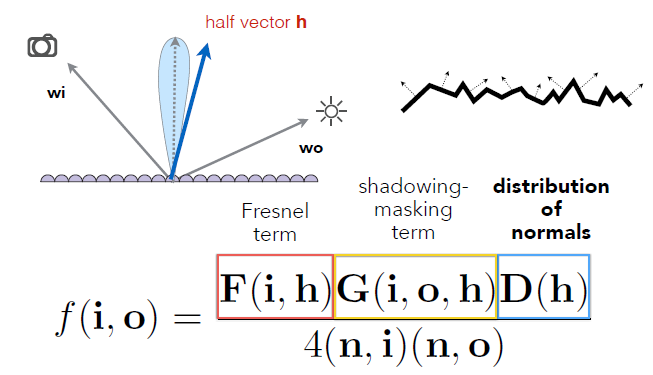
- \(F(i,o)\) 菲涅尔项,如果入射光线几乎平行入射,那么大量光线被反射.
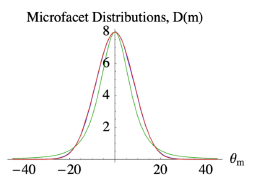
- \(D(h)\) 法线分布,给定方向上,分布的值是多少
- \(G(i,o,h)\) 几何项,修正微表面之间相互遮挡而产生阴影或无法观察到的情况.
对于几何遮蔽函数\(G(i,o,h)\),用于描述微表面间的遮蔽(Shadowing)和遮挡(Masking)效应,确保能量守恒并增强物理真实性.
G项修正以下两种现象:
遮蔽(Shadowing):入射光线被微表面凸起部分阻挡.
遮挡(Masking):出射光线被微表面凸起部分遮挡.
注意:若不考虑G项,粗糙表面会在高光区域出现过亮的现象(违反能量守恒).
G项与粗糙度关系:
低粗糙度(平滑表面):G项接近1(遮蔽/遮挡效应弱)。
高粗糙度(粗糙表面):G项显著降低(遮蔽/遮挡效应强)。
常用Smith GGX模型确定G项:将G项拆分为入射(\(G_1(\omega_i)\))和出射(\(G_1(\omega_o)\))两部分,
其中,
- \(\omega\) 光线方向,(\(\omega_i\)入射方向,\(\omega_o\)出射方向)
- \(n\) 宏观表面法向量
- \(α=roughness^2\) 粗糙度的平方(映射到0~1)
由此可知,模型确定后,G项是一个取决于\(n,\omega,α\)的常数. 其他G项模型,还有Beckmann模型、Schlick-GGX模型等.
接下来计算\(F(i,o)\)和\(D(h)\)两项.
1)计算菲涅尔项\(F(i,o)\)(常用Schlick近似)
其中,\(R_0\) 垂直入射时的基础反射率(如金属的Albedo,非金属的0.04);\(θ\) 入射光与表面法线的夹角,即\(\omega_i,\omega_o\)夹角的一半.
2)计算 法线分布\(D(h)\)
如果要定义法线分布函数(Normal Distribution Function, NDF),需要将角度描述成一个分布,例如,Beckmann 分布
其中,
- h:微表面法线(半角向量)
- \(θ_h\) :h与宏观表面法线的夹角
- α:表面粗糙度参数(\(α=roughness^2\))
物理含义:α 越大,微表面法线分布越分散(表面越粗糙);\(\int_Ω D(h) cos θ_h dh = 1\),反射光总量能量守恒;通过指数\(e^{-\frac{tan^2θ_h}{α^2}}\)模拟高光随角度快速衰减的特性.
如果我们用Schlick近似引入第二项,将\(R_0\)提取出来,那么
其中,基础反射率\(R_0\)取决于材质,材质确定时\(R_0\)是常数.
现在每个积分对每个(粗糙度,入射角)组合生成一个值. 因此,每个积分会得到一个二维数组(纹理). 当我们需要某个积分时,直接从该二维数组对应纹理中,根据入射角、粗糙度查找即可.
通过前面提到的Split Sum 2步的处理,能得到如下结果:
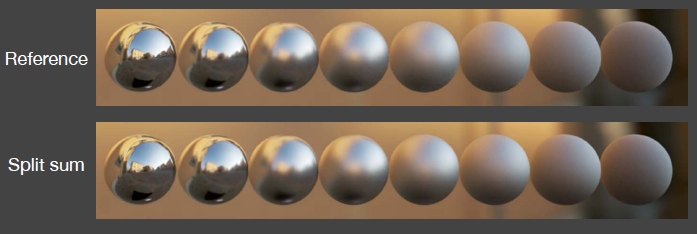
Split Sum近似
在工业界,将积分转化为求和:
这就是所谓分离求和(split sum),一种基于IBL的数学优化方法,通过将复杂的镜面反射积分拆分为2个独立部分进行预计算,显著降低运行时计算开销.
来自环境光照的阴影
通常来说,很难做到在实时渲染中实现阴影.
不同角度看环境光照:
- 当做多个光源(many-light)问题
因为每个光源,都要生成其shadow map,那么代价线性于光源数量.
- 当做采样(sampling)问题
对空间中各个不同方向光照进行采样,需要大量采样样本,采样的难度不在于往各个方向去看,而是往不同方向看visibility是什么.
- 工业解决方案
为主光源(最亮的光源)生成阴影(或者稍微多点,2、3个阴影)
相关研究:
1)Imperfect shadow maps,做的Indirection illumination部分的阴影;
2)Light cuts,解决off-light(离线渲染)中的many-light问题:把场景中反射物当做很多小的光源,很多反射物意味着很多光源,将这些光源归类,然后整体照亮某一个点,照亮出来的结果是什么;
3)RTRT(real time ray tracing),一种通过硬件加速(如NVIDIA RTX显卡)实现高质量实时渲染的技术;
4)PRT(Precomputed Radiance Transfer),能得到非常精确的来自环境光的阴影.
背景知识
频率、滤波
傅里叶级数展开:任何一个函数,都能写成 “常数 + 一系列sin + cos”的形式.
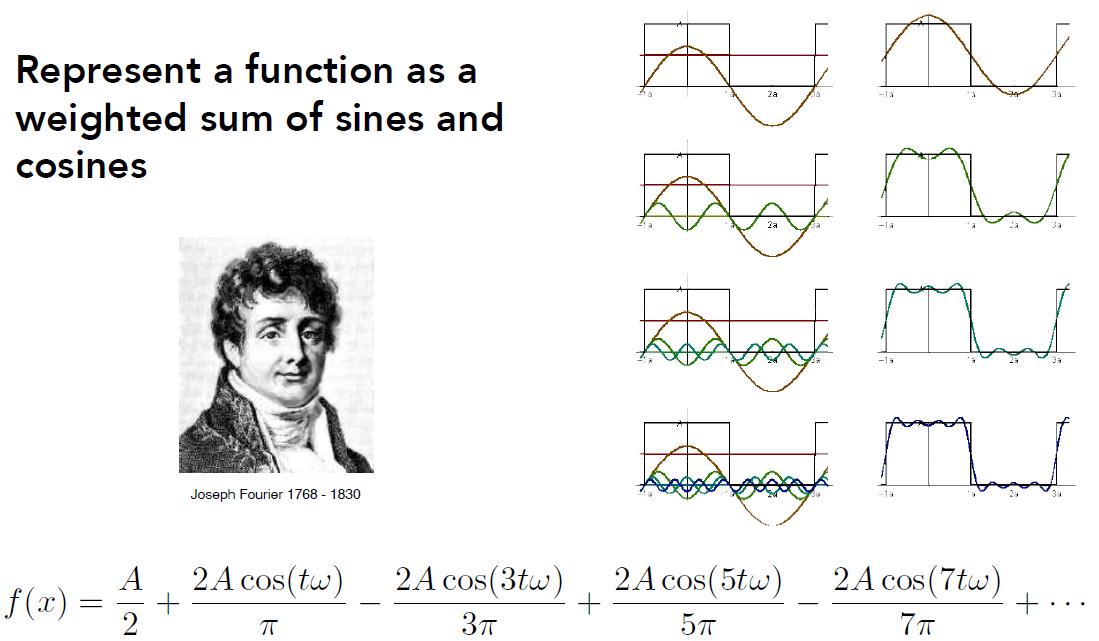
上图中,sin项的系数为0.
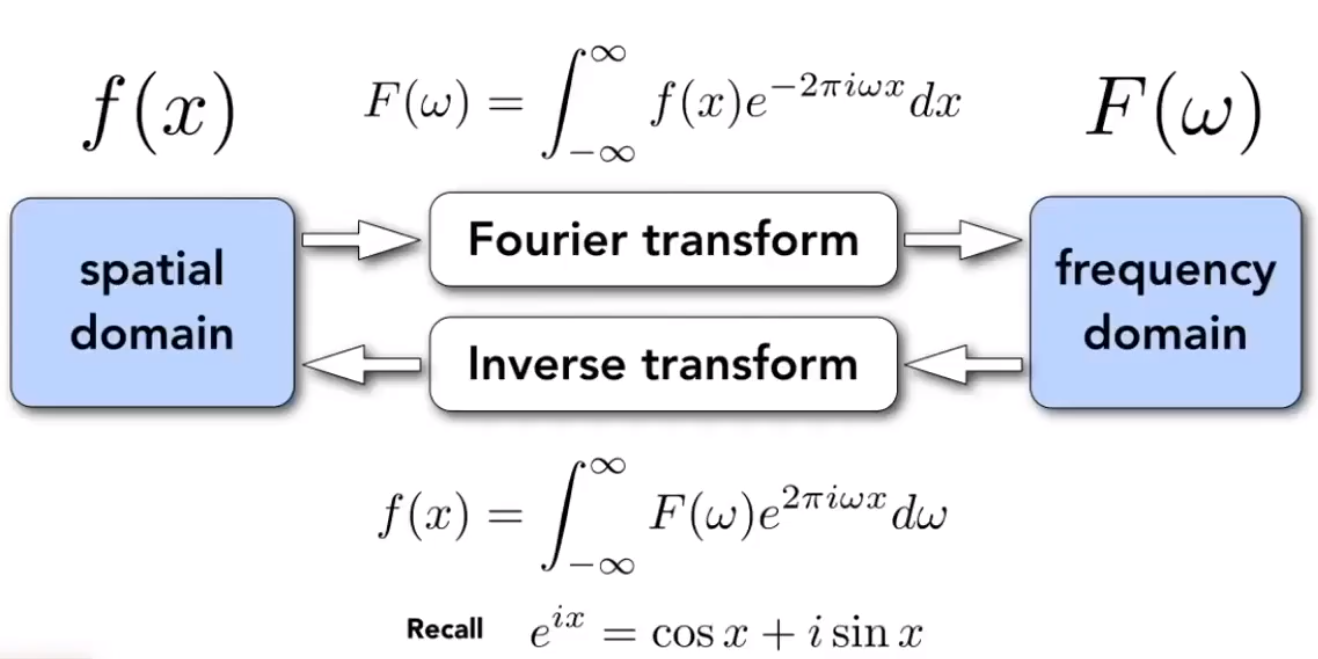
傅里叶变换:将一个函数从时域变换到频域
下图中,我们逐渐增加频率的项
滤波,就是要去掉一系列频率上的内容.
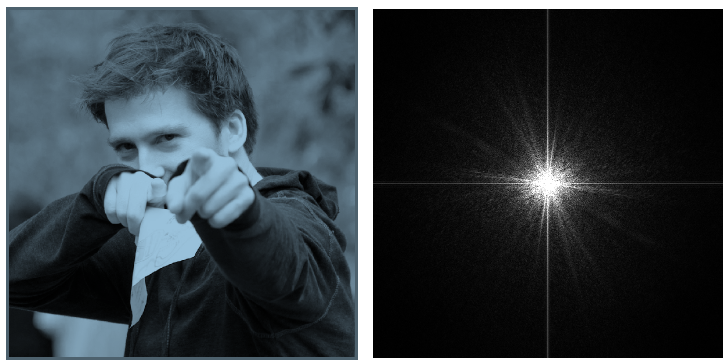
如下图,左图是二维图形(时域),右图是其对应频域,俗称频谱.
中间亮点是高频的内容,代表变化剧烈;
四周暗的部分,代表变化小.
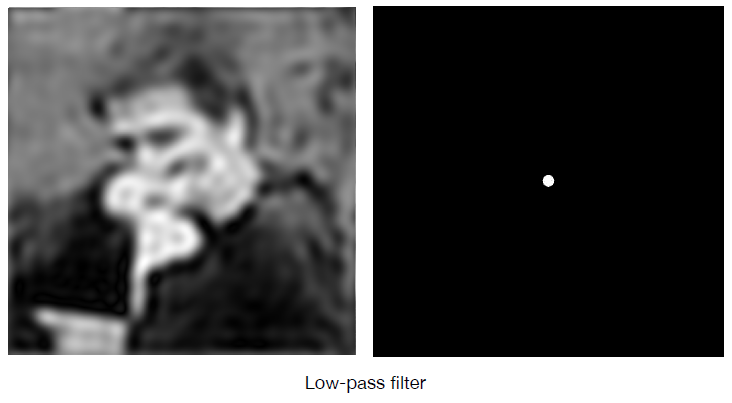
滤波:现在,我们对图像进行低通滤波,只留下低频的部分,然后将低频部分还原成图像,会得到相对模糊的图像.
卷积定理(Convolution Theorem)
时域上做卷积 = 频域上做乘积
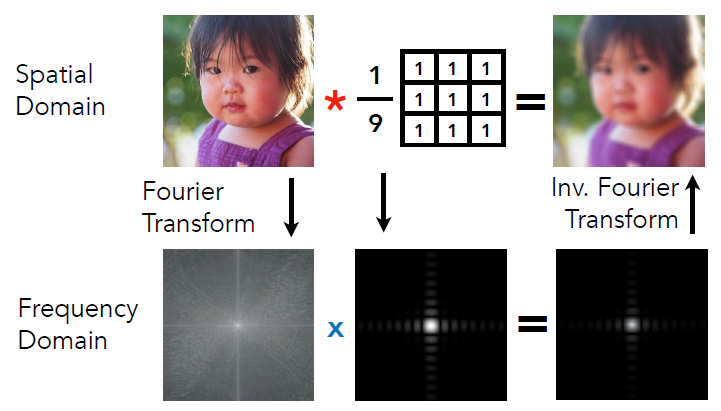
两个函数相乘,然后做积分,就可以理解成时域上的卷积 = 频域上2个信号相乘
只有有一个函数是低频的,那么它们的积分也是低频的,即积分的频率取决于\(f(x),g(x)\)中最低的频率.
低频 = 光滑函数/改变缓慢等
基函数(Basic Function)
将一个函数转化成其他函数的线性组合. 如下式中,原函数\(f(x)\)可以转化成一系列函数\(B_i(x)\)乘以一个系数\(c_i\)的和,则称\(B_i\)为基函数(Basic function).
傅里叶级数展开,就是一系列的基函数.
常用基函数:
- Spherical Harmonics(SH)(球谐函数)
- Wavelet(小波)
- Zonal Harmonics(区域谐函数)
- Spherical Gaussian(SG,球面高斯函数)
- Piecewise Constant(分段常数)
注解:
1)高斯函数指指数函数
其中,A表示幅值,μ表示期望,σ表示标准差.
2)球面高斯函数
其中,\(\bm{v}\)单位方向向量,μ主方向,λ带宽参数
如何从实时环境光、全局光照中,计算阴影呢?
有3种办法:
- Spherical Harmonics
- Prefiltered env. lighting
- Precomputed Radiance Transfer (PRT)
球谐函数
球谐函数(Spherical Harmonics, SH)是定义在单位球面上的一组2D正交基函数\(B_i(\omega)\),用于描述球面上的任意分布.
特点:
1)任意2个不同基函数之间的内积(inner product)为0.
函数内积有点类似于向量点积的概念,向量点积是各个分量相乘再求和,函数内积是2个函数相乘再积分.
2)SH旋转不变.
3)SH基函数计算成本不高.
函数的内积定义:
注意:方程是在定义域内积分,即x轴上.
球面函数的内积:
其中,\(\bm{n}\in Θ\)代表在单位球面方向上进行积分.
标准正交函数集(orthonormal set)也是一个正交集,附加条件是该集合中的任意一个函数与自身的内积都为1. 一组函数\(\{f_j()\}\)是标准正交的条件:
标准正交基优点:想要找到最接近目标函数的近似值很简单. 每个基函数的权重系数都是目标函数\(f_{target}()\)与相应基函数的内积:
实践中,该积分只能通过数值方法进行计算,通常采样蒙特卡洛采样,对平均分布在球面上的n个方向进行计算,然后再求平均值.
SH基函数可以按照频带(frequency band)进行排列. 第一个基函数是一个常数;接下来三个基函数是线性变化,它们在球面上缓慢变化;再接下来五个基函数是变化稍快的二次函数... 频率较低的函数,即在球面上变化缓慢,如Irradiance等,可用相对较少的SH系数来精确表示.
类似于一维情况下的傅里叶函数,每一层级基函数频率不同,个数不同. 下图是Spherical Harmonics的可视化,
- l=0:第0层(layer),它是一个uniform,值都一样;
- l=1:第1层,有3个函数,某个半球上有一个值,对称的半球上有不同的值,各种函数朝向不一样;
- l=2:第2层,有5个函数;
- l=3:第3层,有2*3+1=7个函数;
...
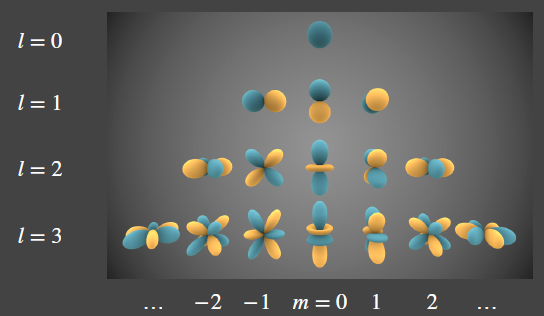
有人给不同行的(基)函数起不同名字,l=0的函数,叫“第0阶SH”;l=1的函数,叫“第1阶SH”;l=2的函数,叫“第2阶SH”;... 每一阶(层)有2l+1个函数,编号从“-l...-2,-1,0,1,2,...,l”.
当投影到SH的时候,所获得的系数代表了投影函数在各个频率上的振幅(amplitude),即频谱(frequency spectrum),代表了信号或波形中各个频率成分中的强度分布. 在该光谱域(spectral domain),有一个基本性质:2个函数乘积的积分等于函数投影系数的点积. 该特性能使我们能高效地计算光照积分.
既然可以做2D傅里叶变换,为什么不在球面按θ、φ展开2D平面,然后做2D傅里叶变换,最后还原到球面?
如果展开球面,再做2D傅里叶变换,做些近似,最后还原到球面,可能会产生一些缝隙. 而SH本身定义在球面上,因此在球面上做处理并不会产生缝隙问题. 通常只需要4阶即可.
1)如何确定每个SH基函数\(B_i(\omega)\)?
可以用Legendre多项式.
2)如果要将任一函数展开成Spherical Harmonics,那么前面的系数\(c_i\)是什么?
任何一个SH Basic function,求基函数的系数\(c_i\)的过程,称为投影.
对不同方向进行采样,从而计算出该积分.
求出了系数,又知道基函数,就能通过SH的性质(多项式求和)还原初始函数. 通常,取前面4阶即可.
关于投影,可类比向量在三维坐标系中的表示. 比如,有向量V,它在坐标系中的表示是\(V_x,V_y,V_z\),这三个值就是在坐标轴上的投影,所以,
其中,\(\bm{x},\bm{y},\bm{z}\)是基函数,\(V_x,V_y,V_z\)是系数,\(\bm{V}\)刚好是基函数的展开.
PRT
前面讲过,环境光沿着镜面反射方向,去查它的值,就像是看到镜子(specular);
如果先把环境光先做prefiltering,沿着镜面反射方向,在模糊的Environment Light(环境光)上查它的值,看起来像是diffuse.
diffuse BRDF 看起来像低通滤波一样:
下图,意味着只有前面3阶才有值,后面的值没有高频信息.
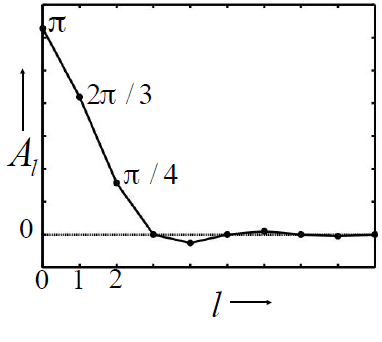
对于任何光照,只要材质是diffuse的,只需要前3阶的SH 描述光照,用其照亮diffuse物体. 与用更多阶的SH效果差别不大.
Sloan与02年提出PRT(Precomputed Radiance Transfer, 预计算Radiance传输). 基本思想:
将Rendering equation 看做2部分:
1)与光照有关的Lighting: \(L(i)\);
2)与光照无关的Light transport:\(V(i)ρ(i,o)max(0,n\cdot i)\)
将Lighting用基函数近似表示:
其中,\(l_i\)是光照系数(lighting coefficent),\(B_i(i)\)是基函数(basis function).
场景不变的情况下,对于任一shading point,物体的遮挡管线不变,即\(V(i)\)不变;物体表面材质不变,那么BRDF不变,即\(ρ(i,o)\)不变.
在其他所有东西都不变情况下,只有Lighting改变,它的Light transport就是一个球面函数.
对于diffuse物体
BRDF是一个常数,记为\(ρ\)
注意:在PRT场合,可以直接交换积分与求和.
式子中\(\int_ΩB_i(i)V(i)max(0, n\cdot i)di\)这部分,刚好是球面函数投影到某个basic function的系数\(c_i\),将其记为\(T_i\).
于是,
这样,\(L(o)\)就能看做2个向量乘积.
代价:
场景中所有物体都不能动,如果运动,那么visibilty在很多地方发生变换;
注意:
1)V项与光源旋转无关,因为V项代表从shading point朝四面八方看,光源旋转不影响物体之间相互遮挡关系.
2)一个基函数,投影到其他任一基函数,就会得到0. 因为任意2个基函数是正交的(垂直).
SH的基函数是正交的,有
投影到SH空间:
重建(Reconstruction):
预计算light transport:
最终,实时渲染:
于是,预计算lighting和light tranport的渲染方程可写成:
看起来复杂度是\(O(n^2)\),但因为基函数是正交的,因此只有p=q时,才有值. 因此,复杂度仍然是\(O(n)\).
下图是diffuse渲染结果:
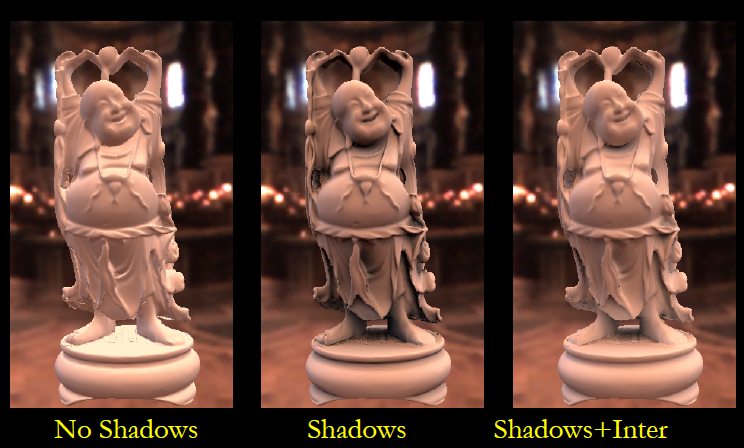
注:Inter = Inter-reflection,相互反射
图中,
- No shadows是只考虑环境光照、不考虑阴影的渲染结果,整体无阴影;
- Shadows是考虑环境光照、阴影的渲染结果,整体偏暗;
- Shadows+Inter 考虑环境光照、反复反射的渲染结果,只有部分地方有阴影.
PRT:对于每个shading point,预计算lighting和light transport
shading point是每个几何形体的顶点(vertex). 实际运算时,可以先计算三角形顶点的shading result,然后在三角形内部插值.
- Shading result: \(L_o(p,ω_o)\)
- Lighting: \(L_i(p,ω_i)\)
- Light transport: \(f_r(p,ω_i,ω_o)cos θ_iV(p,ω_i)\)
Spherical Harmonics(SH,球谐函数) 是一系列基函数.
基函数性质:
1)分为不同的阶(或层),每一行对应一阶,每一行表示一个固定的频率. 随着l(layer)增加,能表示的频率越高.
2)每一种频率(每一层),有2l+1种不同类型的基函数.
3)任何一个二维函数都能投影到SH上面去,可以用一系列加权和描述任意一个二维函数.
同时,任意二维函数能从SH中恢复.
对于glossy物体
对于diffuse物体,不论视角如何旋转,看到的东西,看shading point,整个diffuse shading 即\(L(o)\)与视角无关;
对于glossy物体,与视角有关,有一个不同观察方向,就有不同的\(L(o)\).
代价:
1)任何一个顶点/shading point,都需要存一个transport matrix;
2)render时,需要做向量和矩阵的乘法,操作会比向量与向量做点乘复杂得多.
小波(Wavlet)
球谐函数,是定义在球面上的基函数;
小波是一种在有限时间内振荡、能量快速衰减到零的数学函数,小波具有局部性,能同时分析信号的时间(空间)和频率信息.
小波是一系列基函数,定义在2D图像上,可以认为是一个个小的图像块,不同的小波定义域不同.
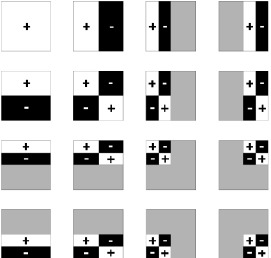
如下图,是2D哈尔小波(Haar Wavelet):
小波函数通过母小波(Mother Wavelet)ψ(t)生成:
其中,a 缩放因子(控制频率),b 平移因子(控制位置).
小波变换(Wavelet Transform)是将信号分解为不同频率成分的数学工具.
与SH最大区别:
小波支持全频率表示,而小波只支持低频表示.
小波缺点:
不支持快速旋转.
参考
Games202 Lecture 5

 浙公网安备 33010602011771号
浙公网安备 33010602011771号