
6轴机械臂D-H法建模
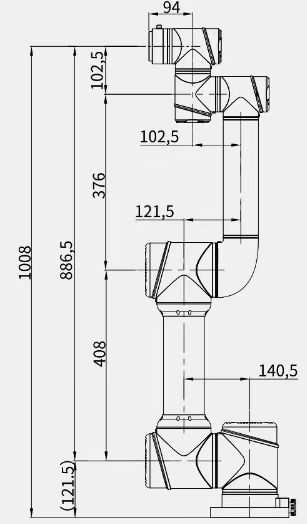
机械臂尺寸图
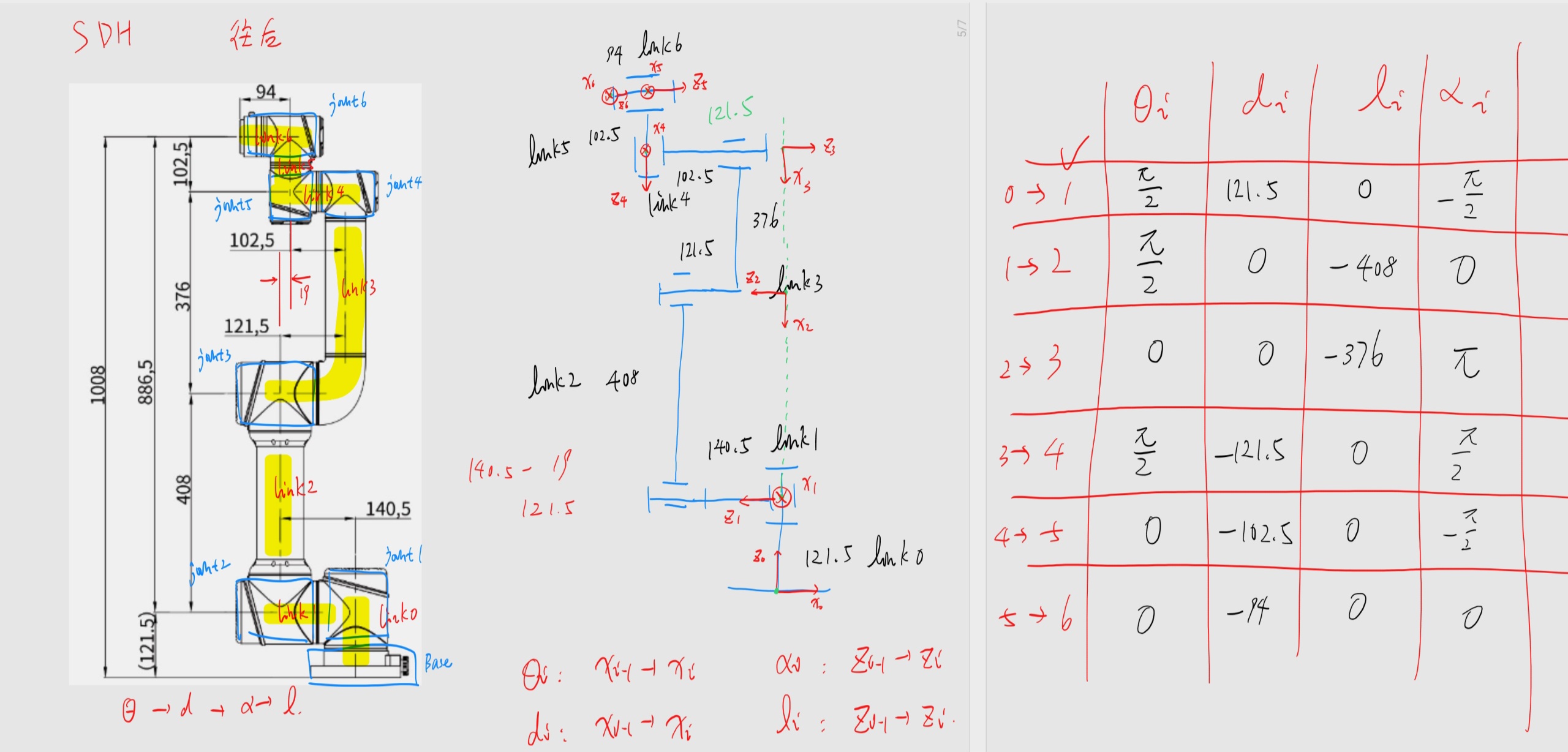
Standard-DH
clc; clear; close all;
% ========== 定义DH参数 ==========
% 关节变量(θ),初始都为0,d、a、α按典型六轴结构设定
% 单位为毫米和弧度
d1 = 0.1215
d2 = 0
d3 = 0
d4 = -0.1215
d5 = -0.1025
d6 = -0.094
theta1 = pi/2
theta2 = pi/2
theta3 = 0
theta4 = pi/2
theta5 = 0
theta6 = 0
a1 = 0
a2 = -0.408
a3 = -0.376
a4 = 0
a5 = 0
a6 = 0
alpha1 = -pi/2
alpha2 = 0
alpha3 = pi
alpha4 = pi/2
alpha5 = -pi/2
alpha6 = 0
L(1)= Link([theta1, d1, a1, alpha1], 'standard')
L(2)= Link([theta2, d2, a2, alpha2, 0, pi/2], 'standard')
L(3)= Link([theta3, d3, a3, alpha3], 'standard')
L(4)= Link([theta4, d4, a4, alpha4, 0, pi/2], 'standard')
L(5)= Link([theta5, d5, a5, alpha5], 'standard')
L(6)= Link([theta6, d6, a6, alpha6], 'standard')
% ========== 连接连杆为一个机器人 ==========
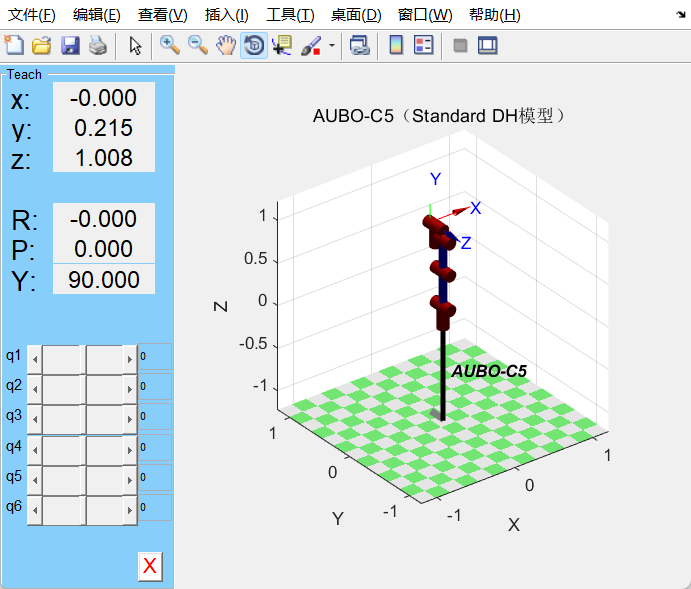
robot =SerialLink(L,'name','AUBO-C5')
title('AUBO-C5(Standard DH模型)');
T = robot.fkine([0 0 0 0 0 0]);
robot.plot([0 0 0 0 0 0]);
% 启动交互式示教器
robot.teach();
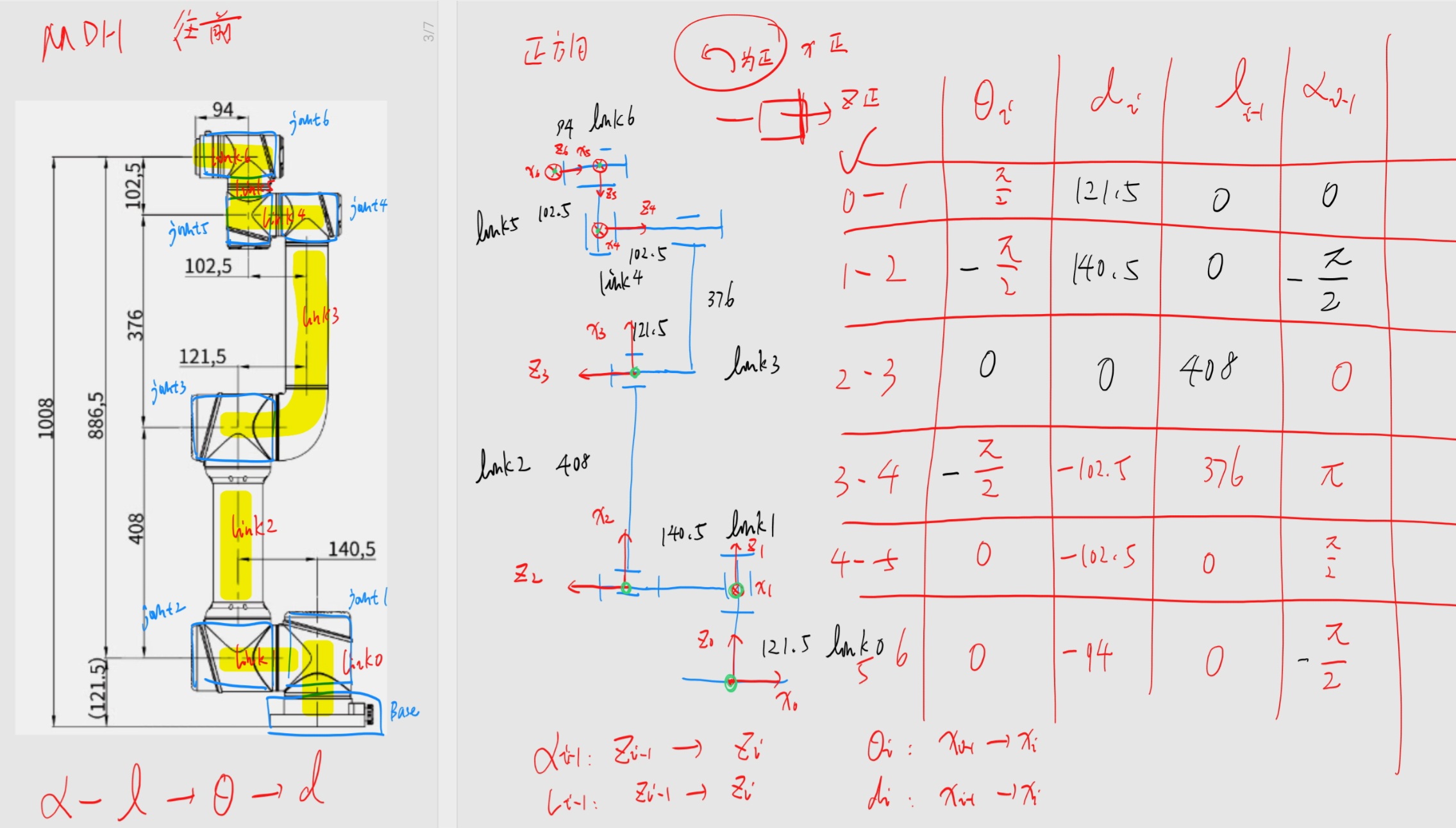
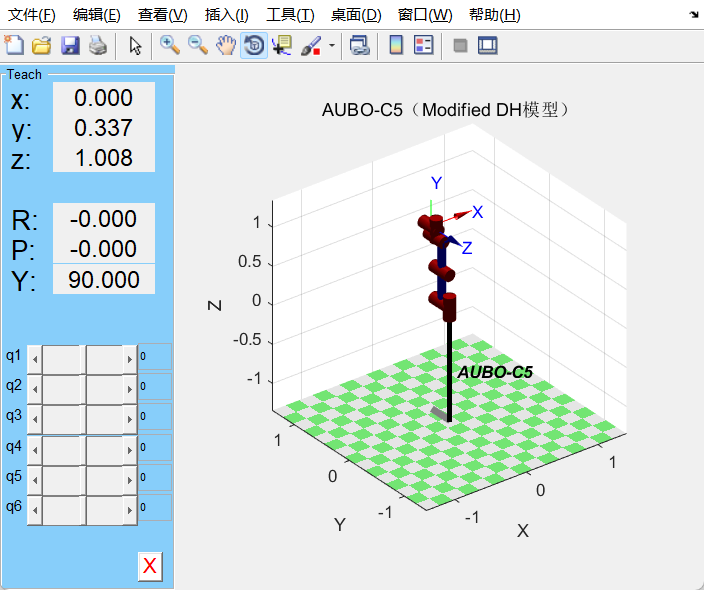
Modified-DH
clc; clear; close all;
% ========== 定义DH参数 ==========
% 关节变量(θ),初始都为0,d、a、α按典型六轴结构设定
% 单位为毫米和弧度
d1 = 0.1215
d2 = 0.1405
d3 = 0
d4 = -0.1025
d5 = -0.1025
d6 = -0.094
theta1 = pi/2
theta2 = -pi/2
theta3 = 0
theta4 = -pi/2
theta5 = 0
theta6 = 0
a0 = 0
a1 = 0
a2 = 0.408
a3 = 0.376
a4 = 0
a5 = 0
alpha0 = 0
alpha1 = -pi/2
alpha2 = 0
alpha3 = pi
alpha4 = pi/2
alpha5 = -pi/2
L(1)=Link([theta1, d1, a0, alpha0], 'modified')
L(2)=Link([theta2, d2, a1, alpha1, 0, -pi/2], 'modified')
L(3)=Link([theta3, d3, a2, alpha2], 'modified')
L(4)=Link([theta4, d4, a3, alpha3, 0, -pi/2], 'modified')
L(5)=Link([theta5, d5, a4, alpha4], 'modified')
L(6)=Link([theta6, d6, a5, alpha5], 'modified')
% ========== 连接连杆为一个机器人 ==========
robot = SerialLink(L,'name','AUBO-C5')
title("AUBO-C5(Modified DH模型)")
T = robot.fkine([0 0 0 0 0 0])
robot.plot([0 0 0 0 0 0])
% ========== 启动交互式示教器 ==========
robot.teach();

 浙公网安备 33010602011771号
浙公网安备 33010602011771号