无人机仿真环境开发
参考 https://space.bilibili.com/393165606/channel/collectiondetail?sid=1750583&spm_id_from=333.788.0.0
目录
创建工作空间
什么是工作空间
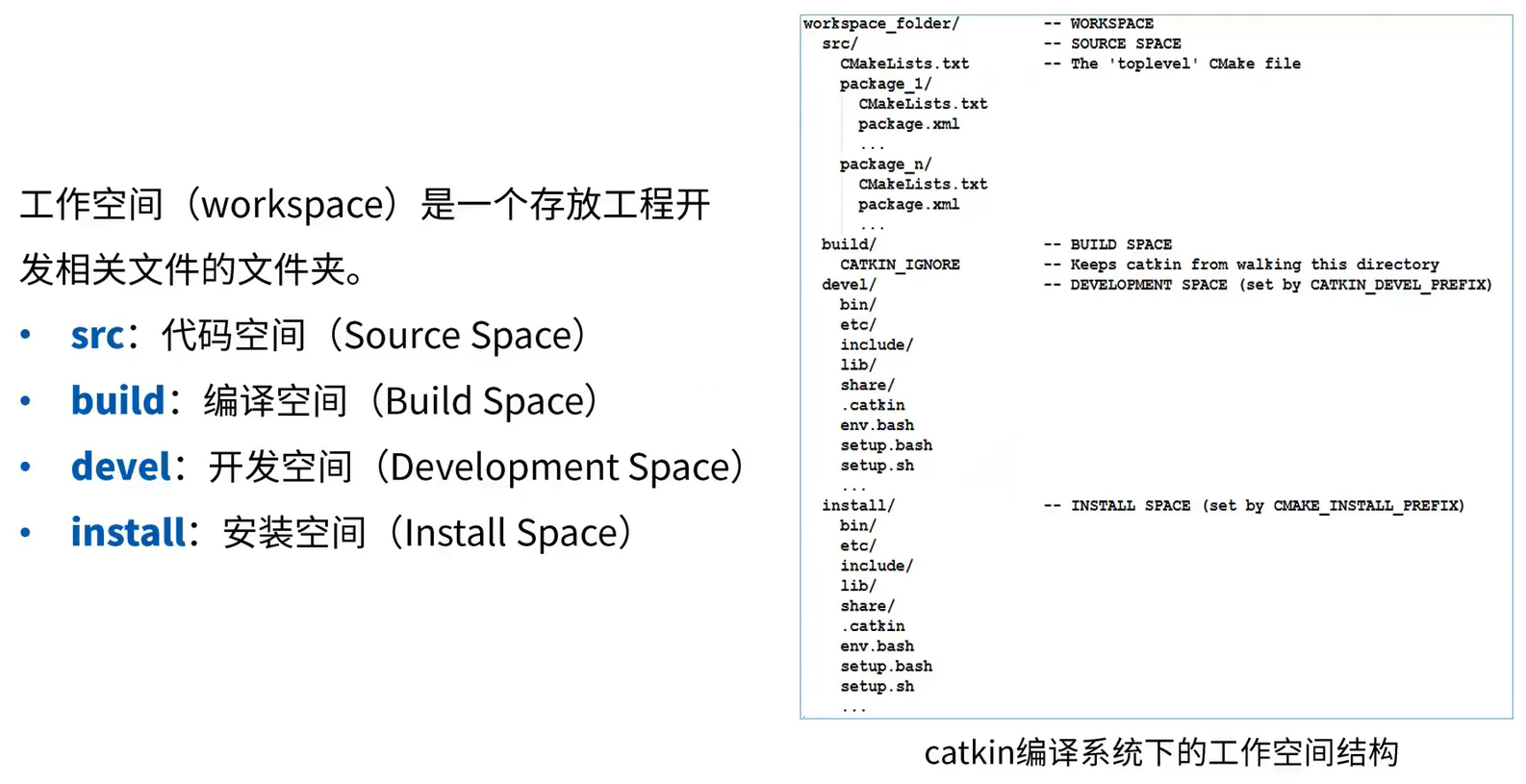
创建工作空间

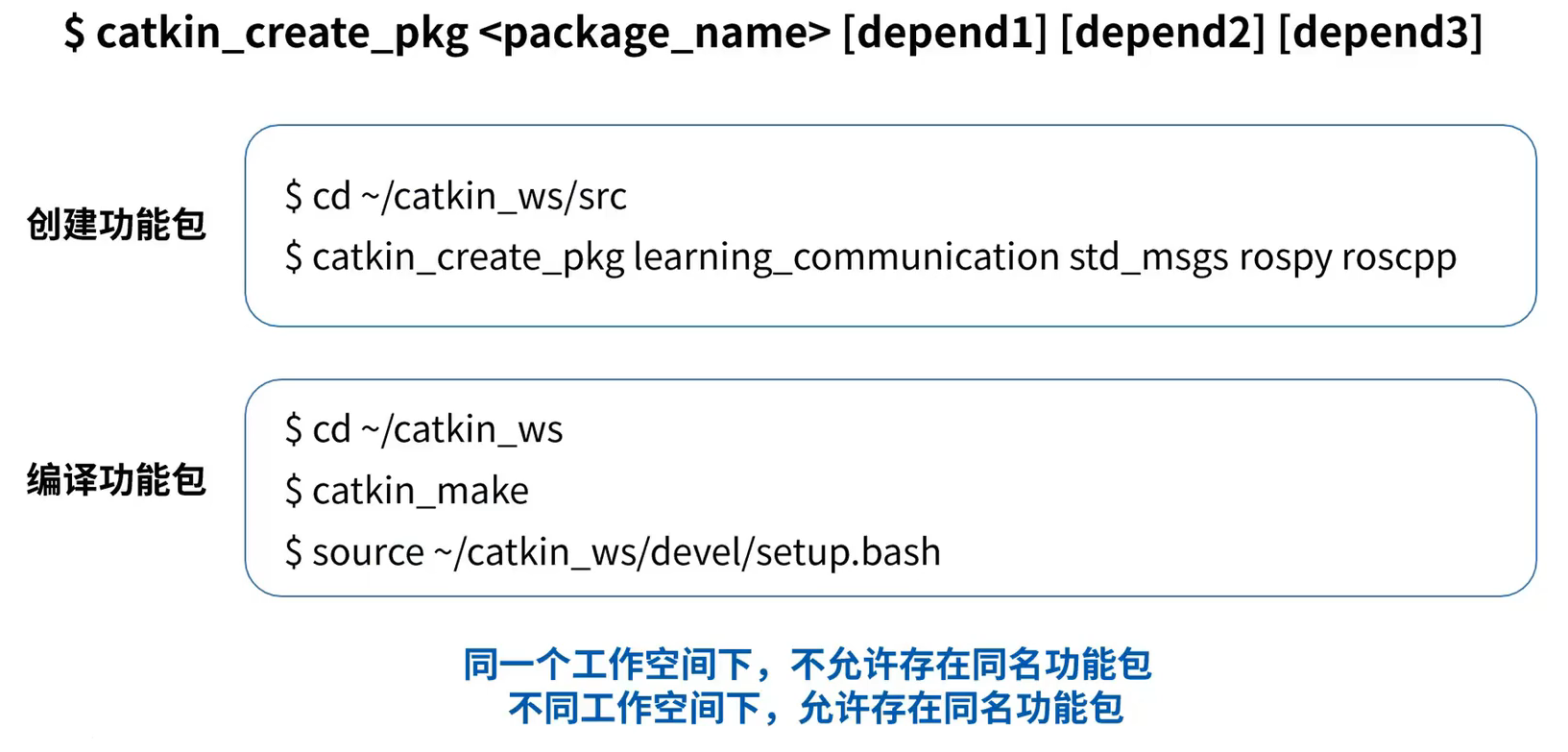
创建功能包
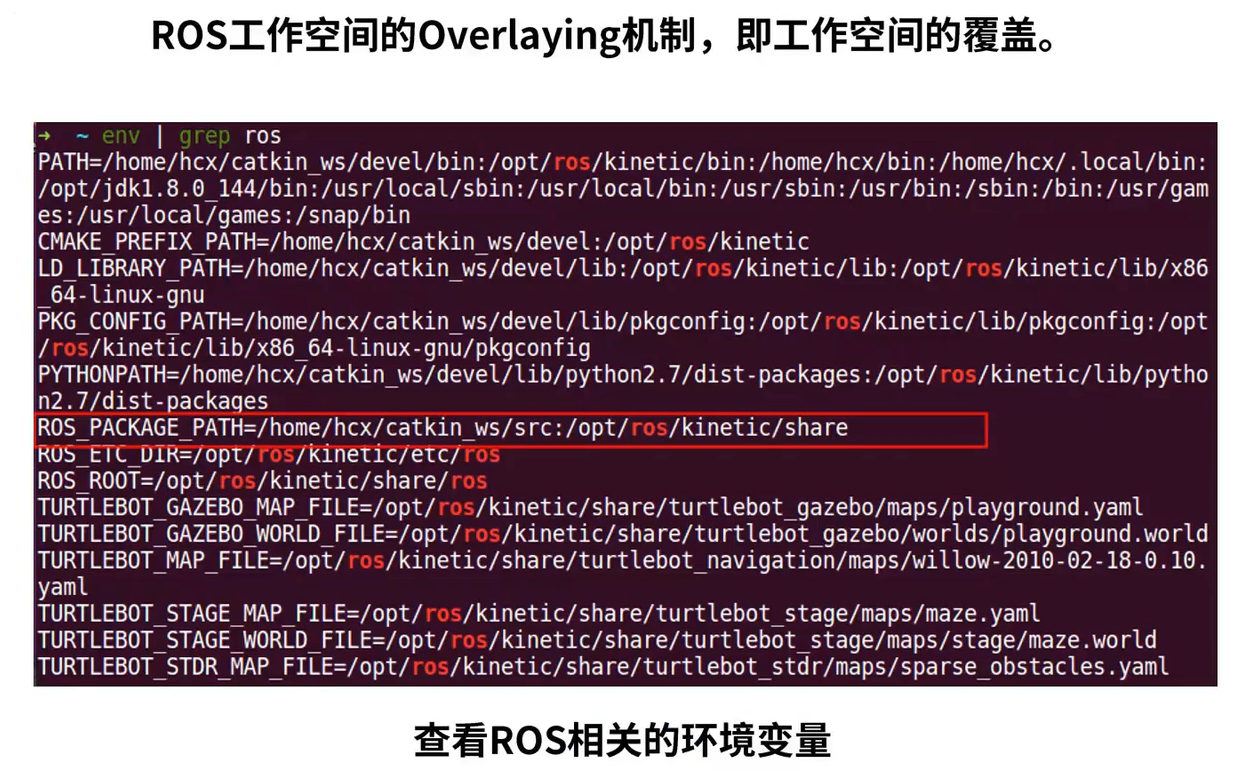
工作空间的覆盖

ROS 通信编程

话题编程
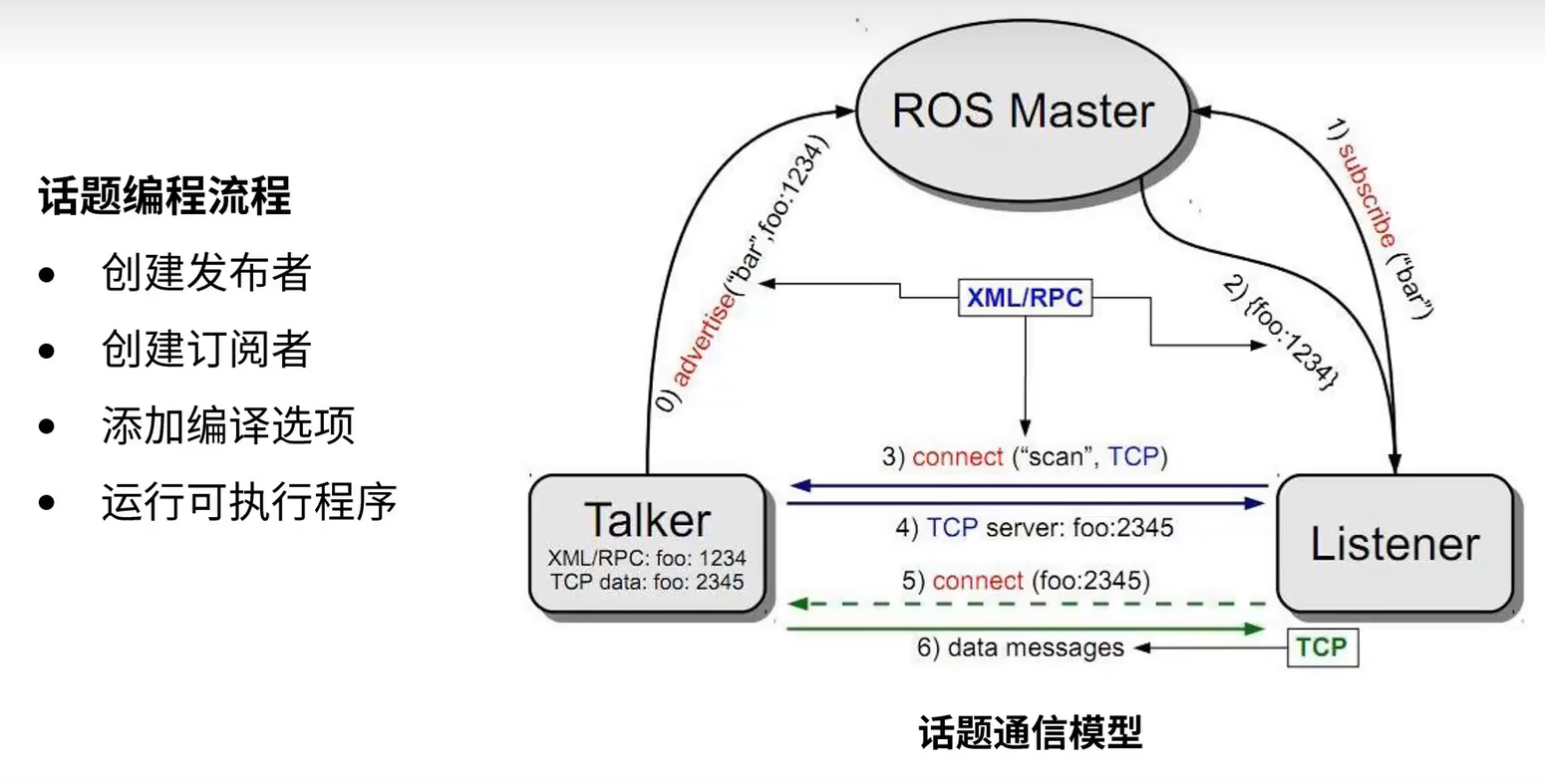
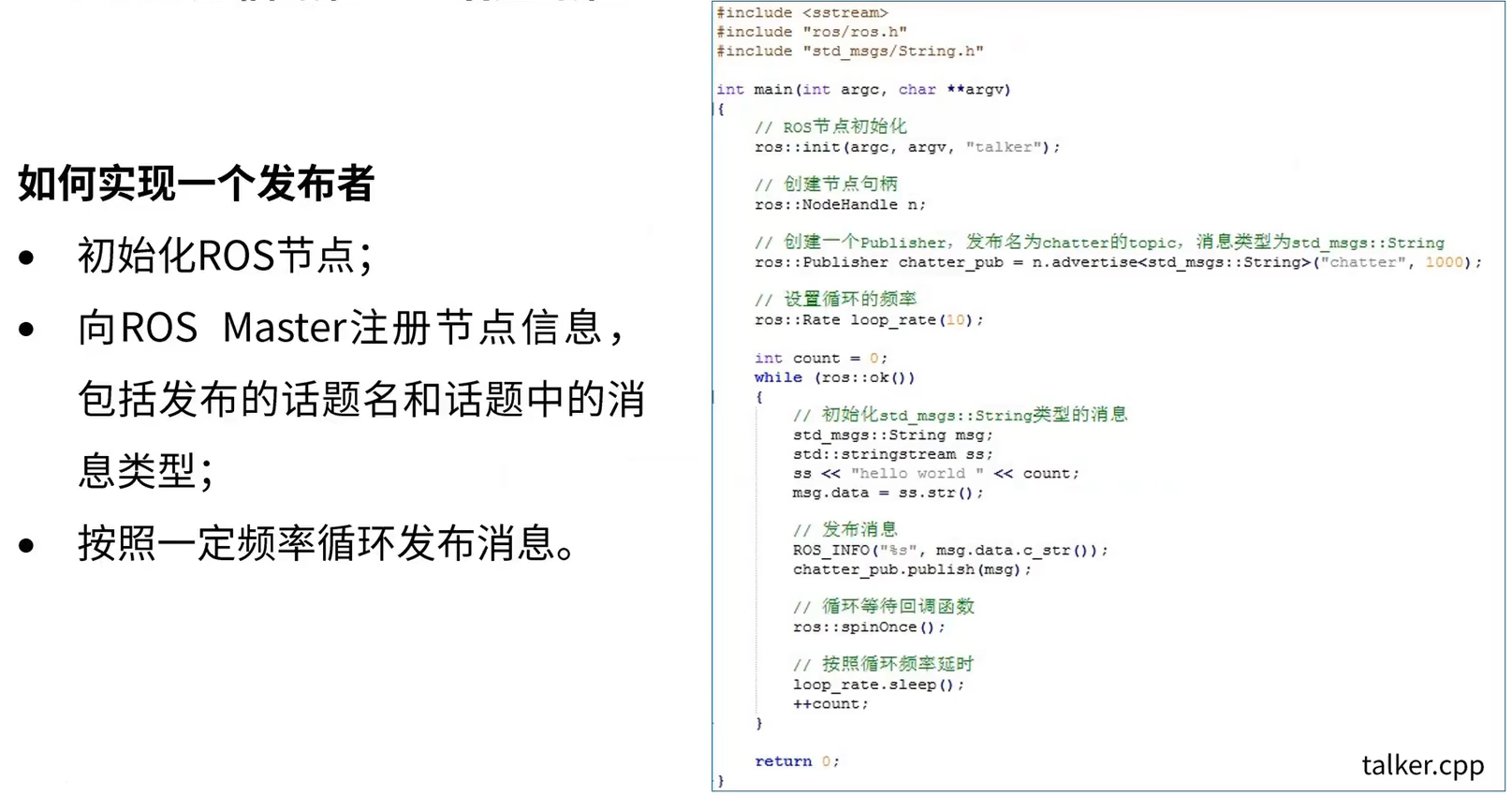
如何实现一个发布者
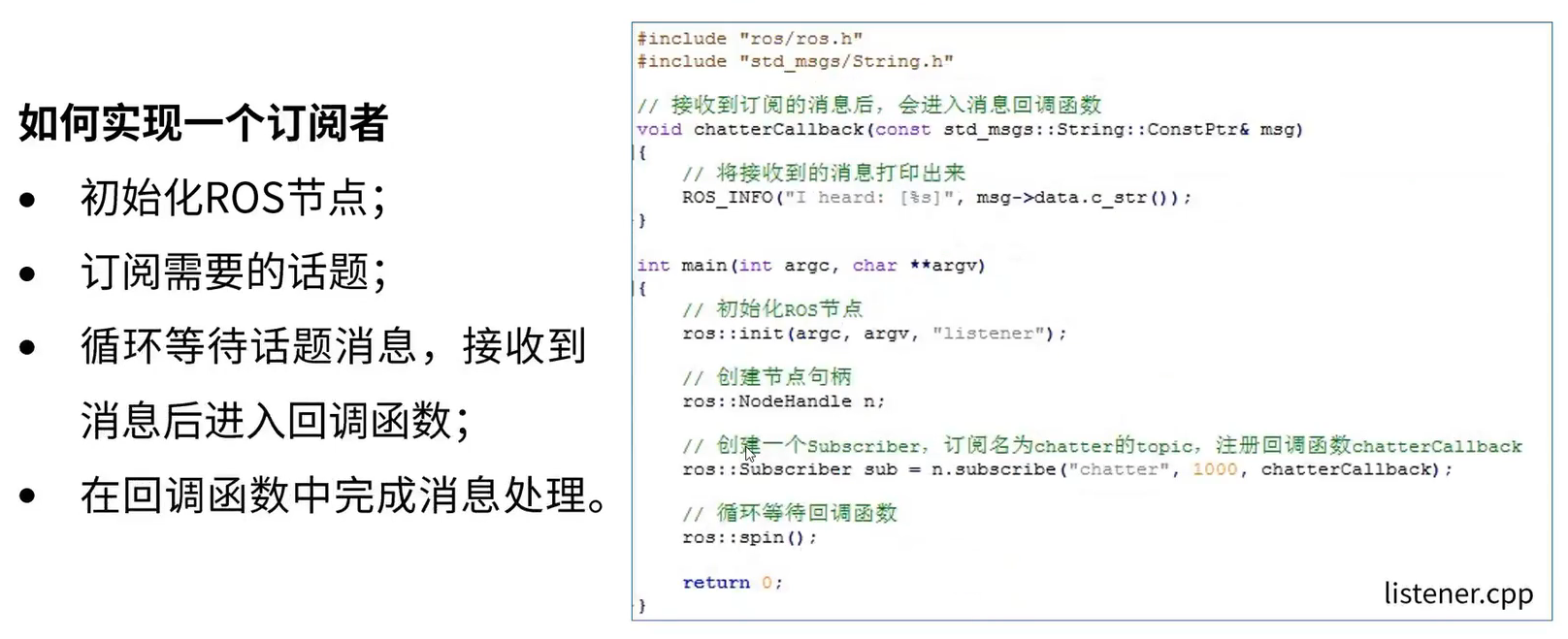
如何实现一个订阅者
如何编译代码

运行可执行文件

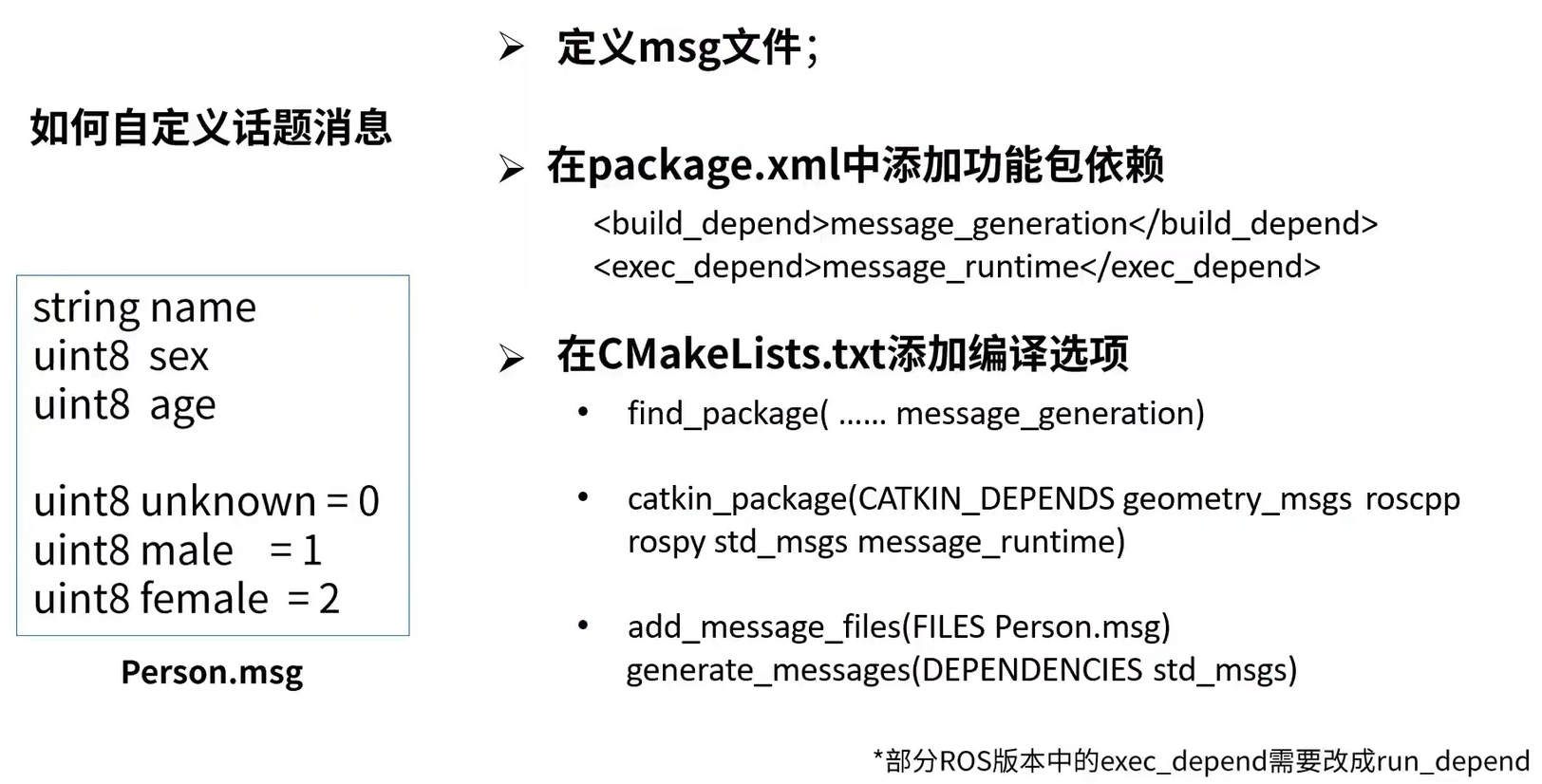
如何自定义话题消息
查看自定义的消息

服务编程
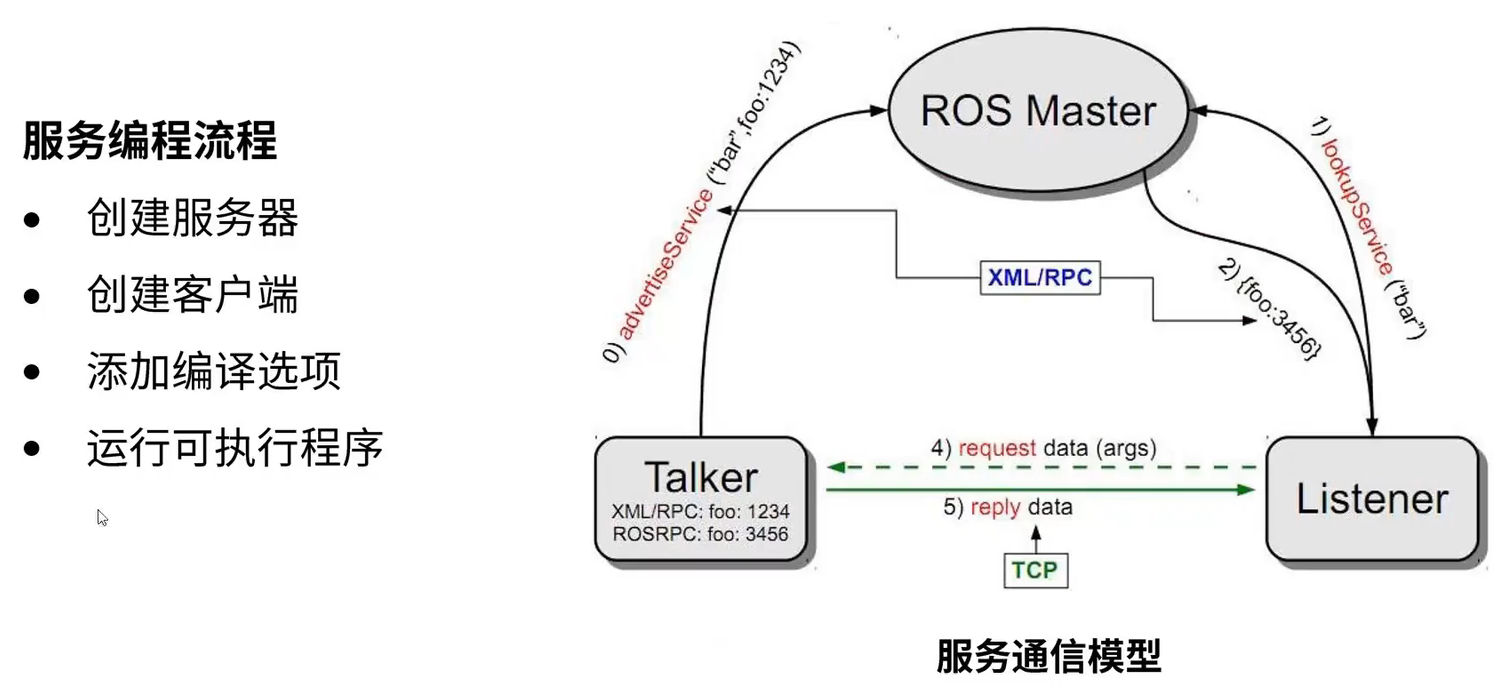
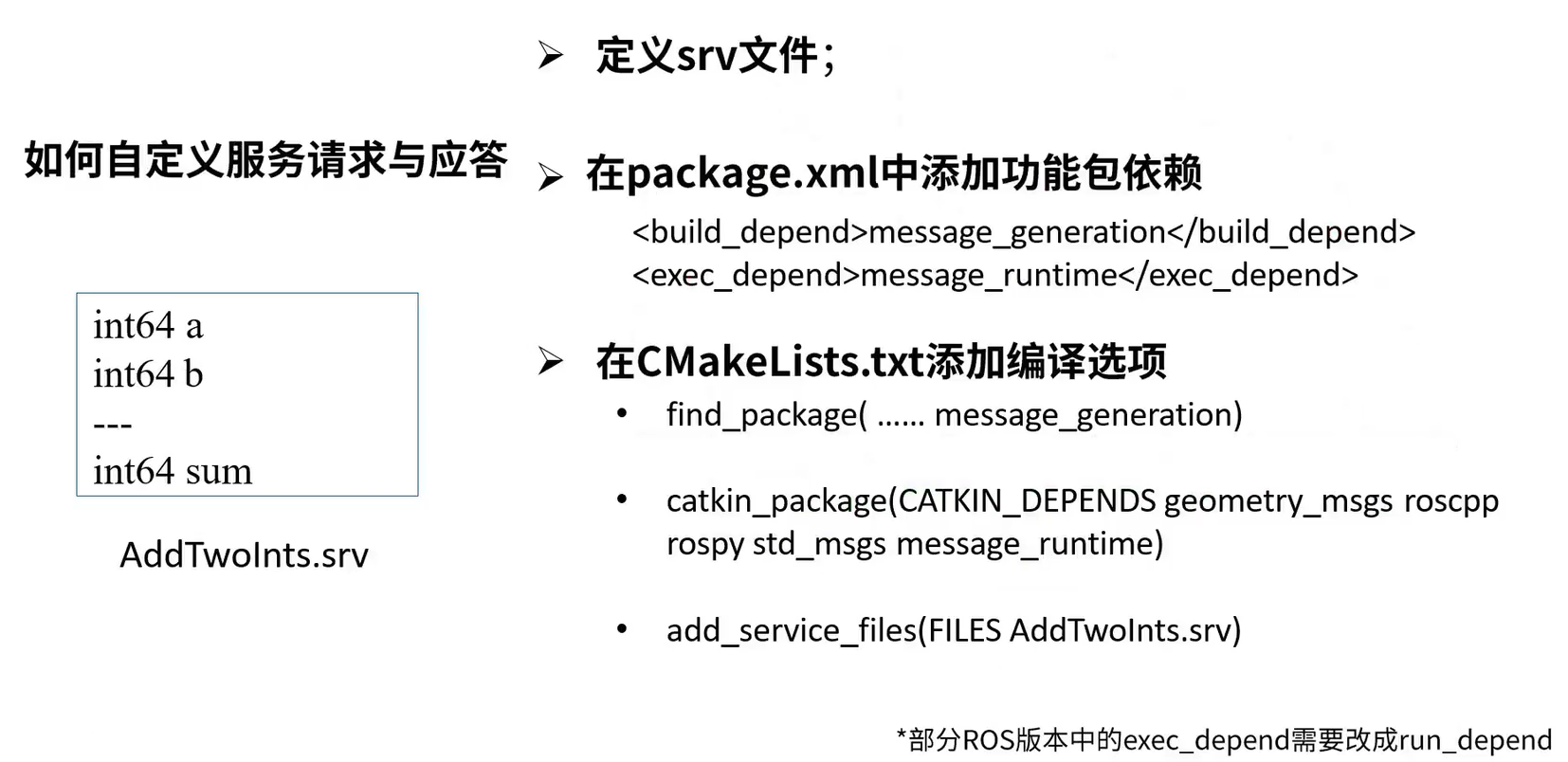
如何自定义服务请求与应答
如何实现一个服务器

如何实现一个客户端

如何编译代码

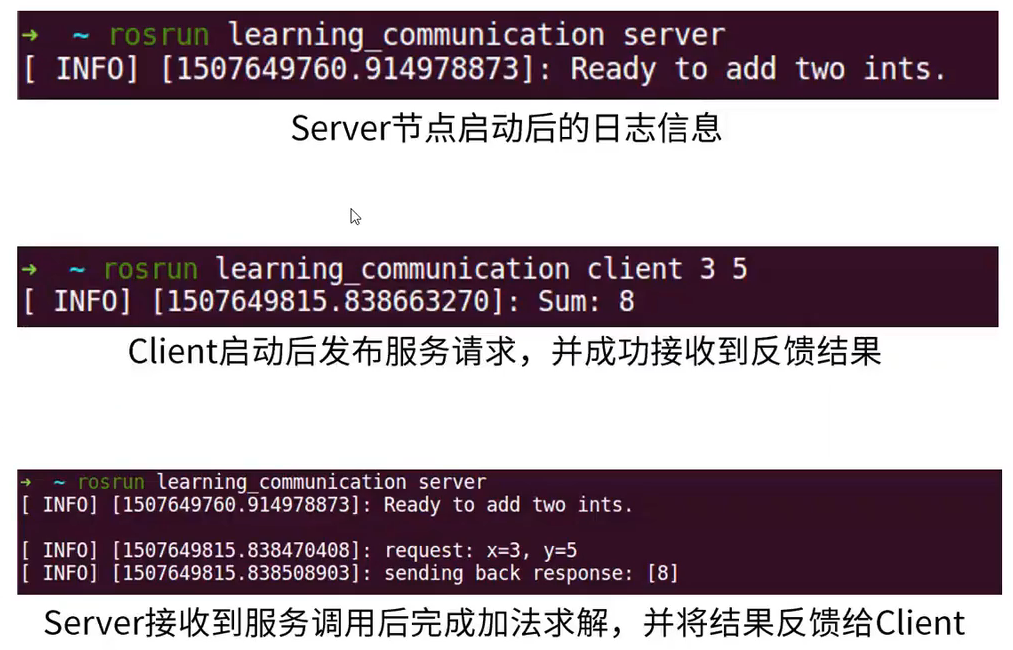
运行可执行文件
实现分布式通信
ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合。
如何实现分布式多机通信
(1) 设置IP地址,确保底层链路的联通
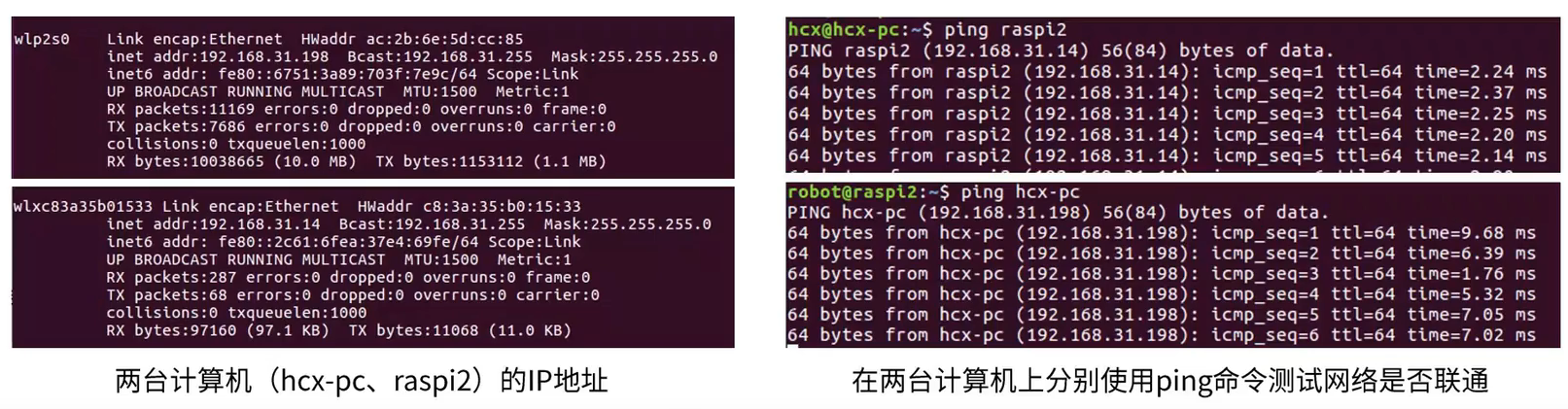
(2) 在从机端设置 ROS MASTER URI,让从机找到 ROS Master

效果

ROS 中的关键组件

Launch 文件

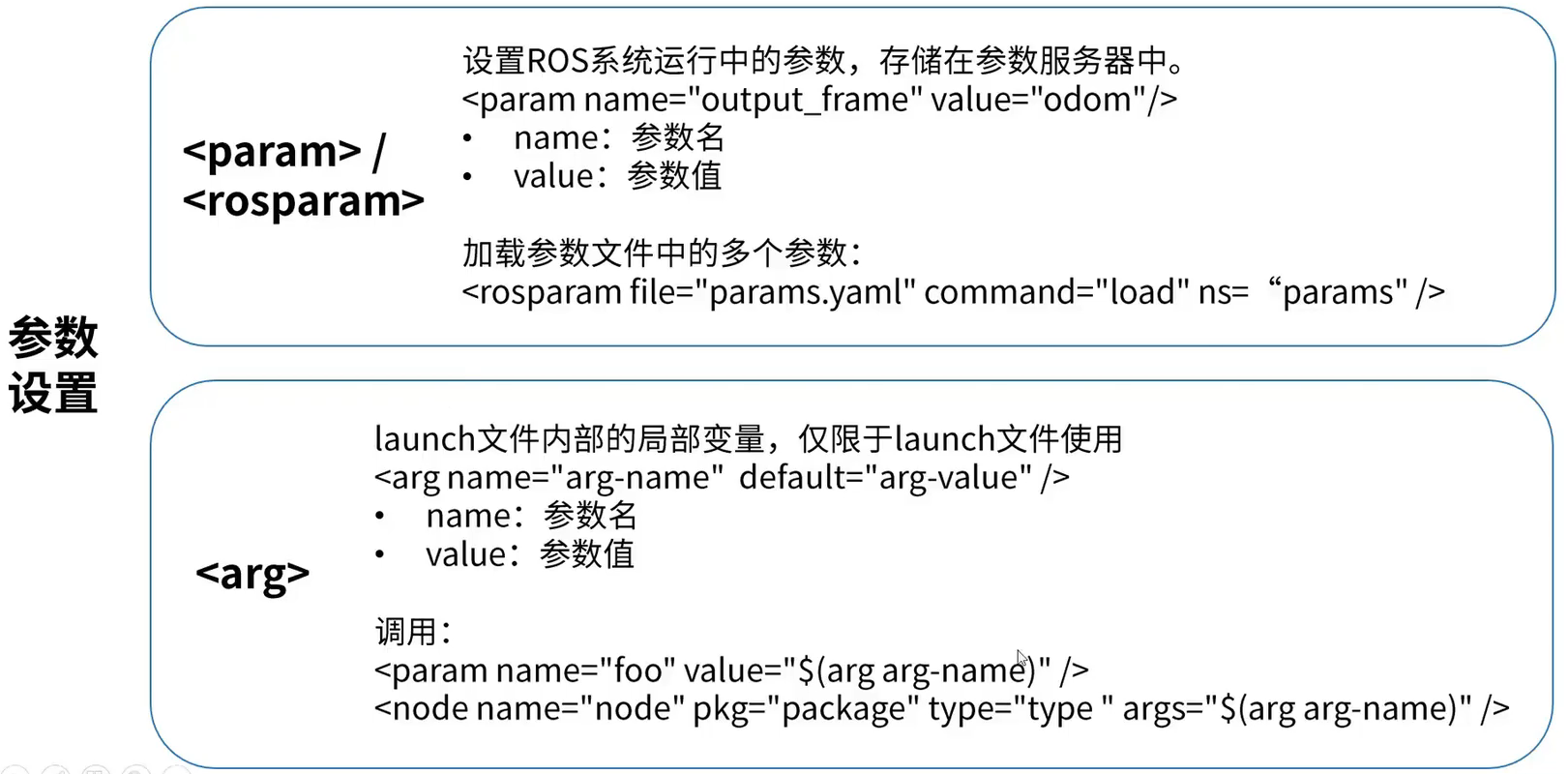
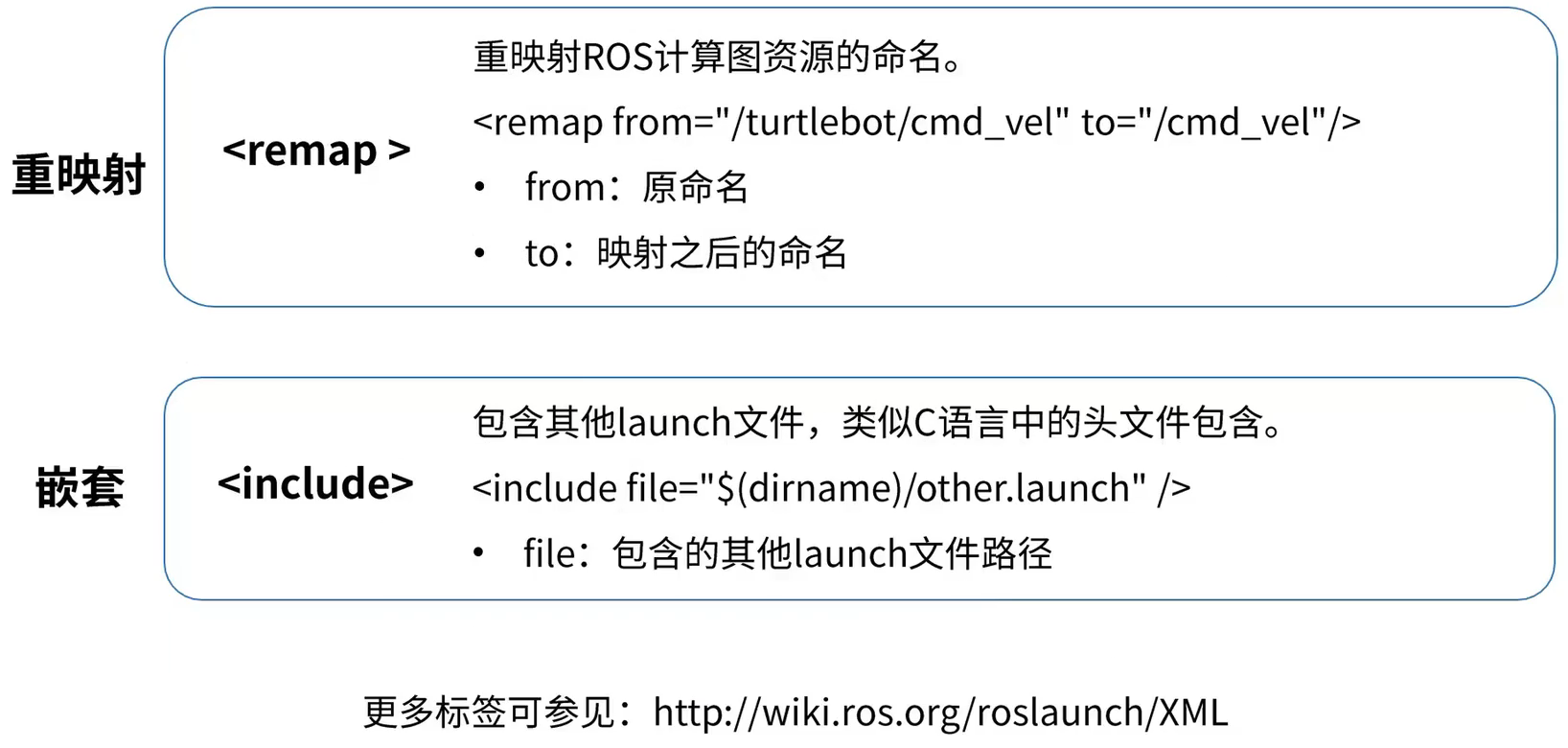
语法
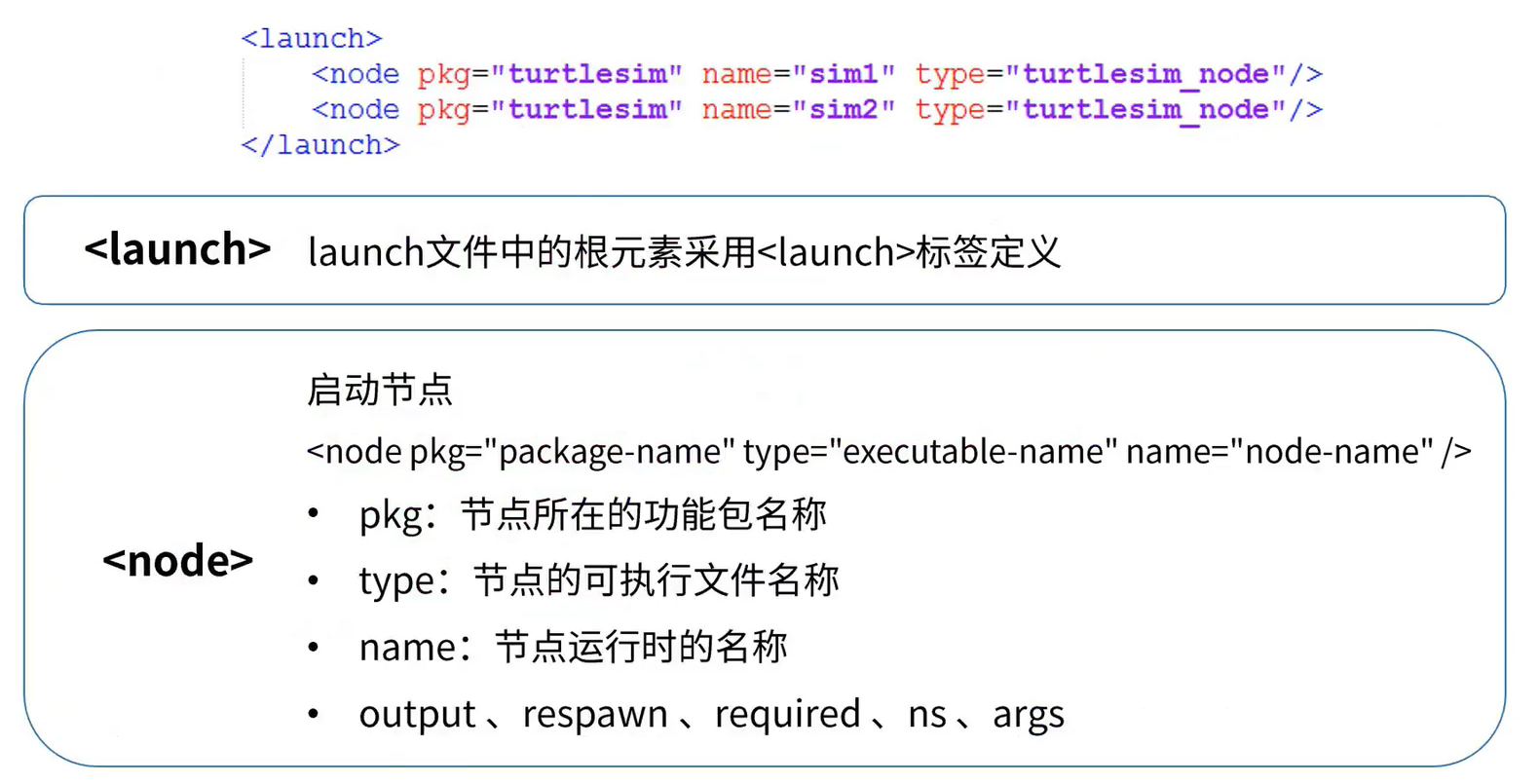
标签
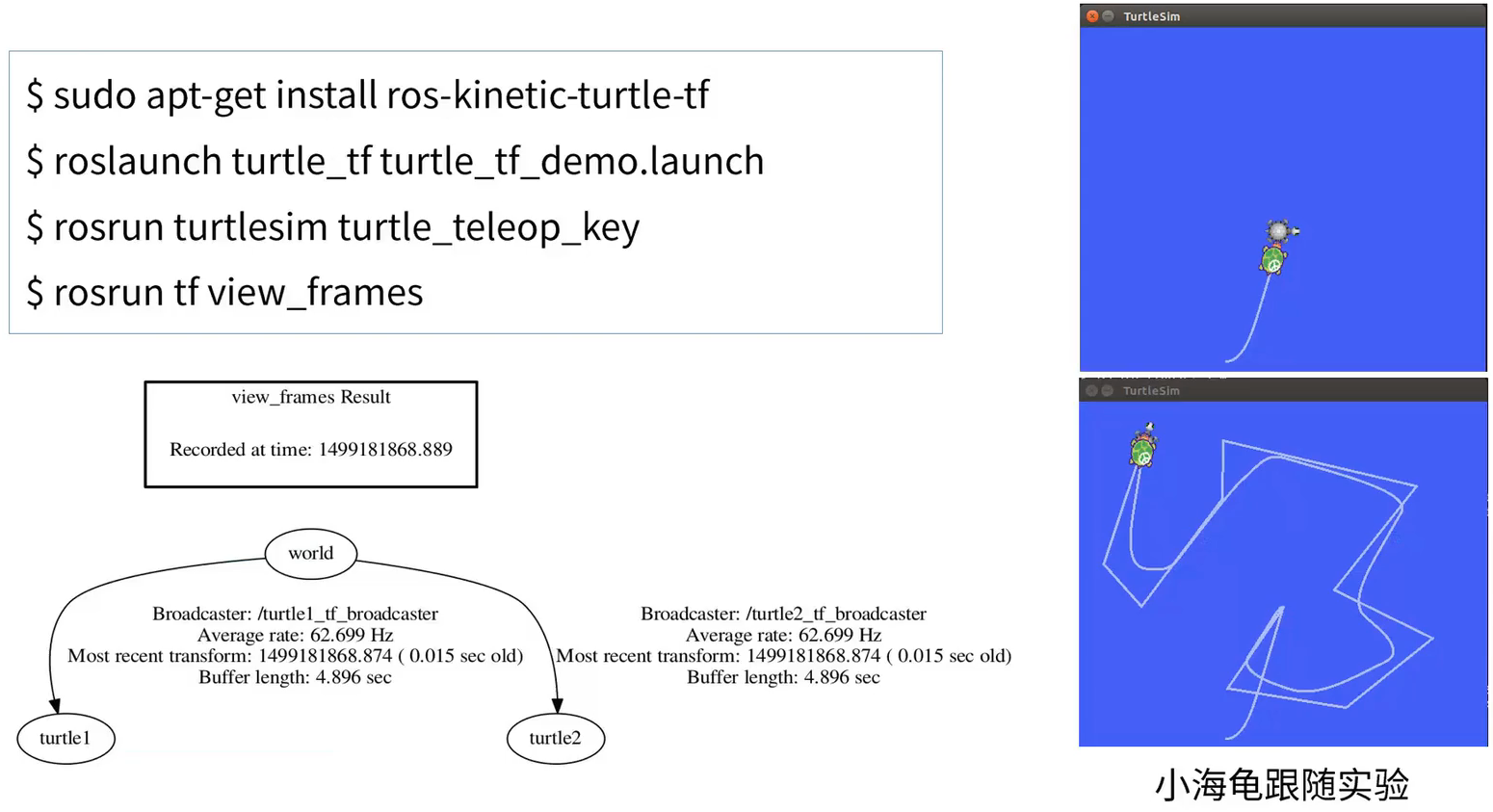
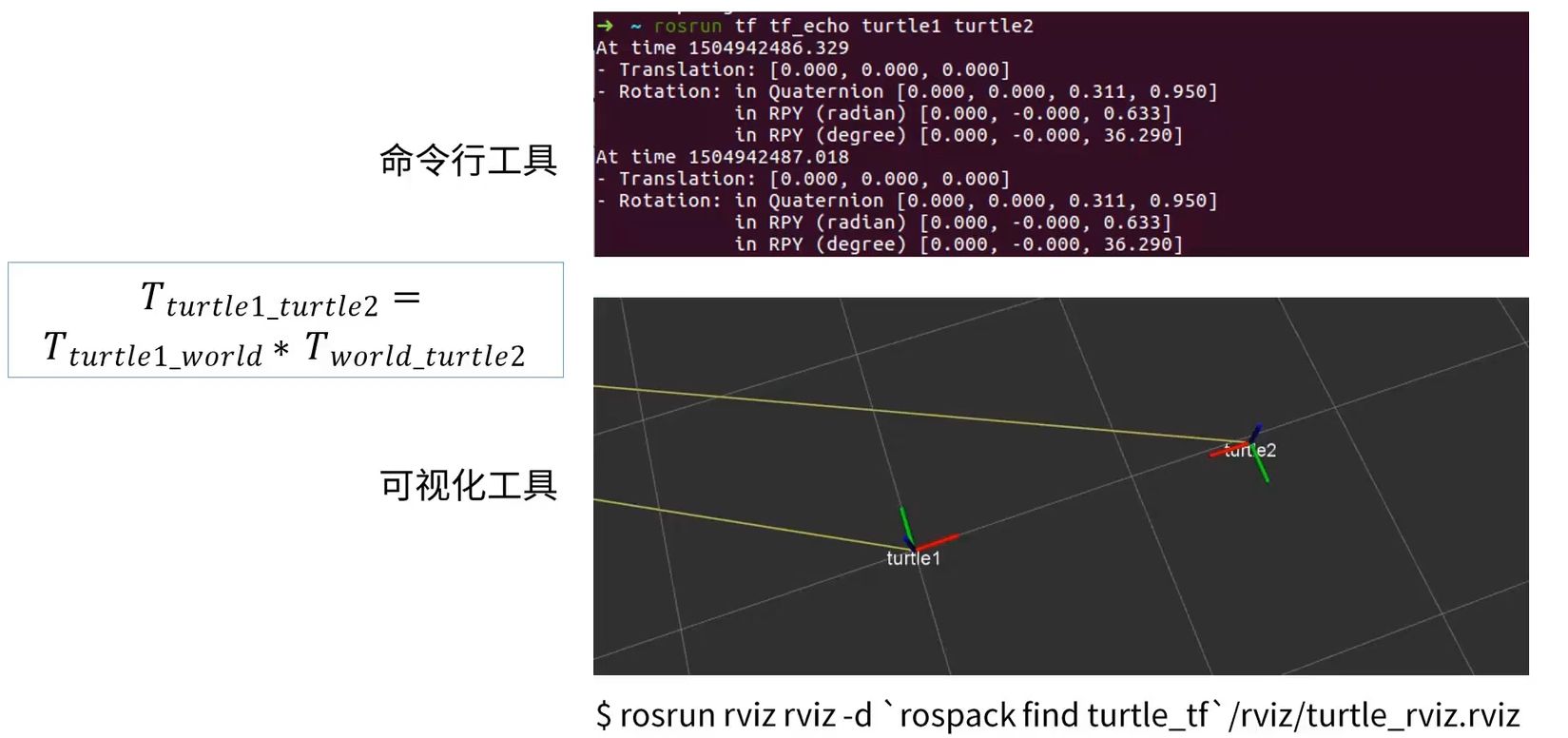
TF 坐标转换

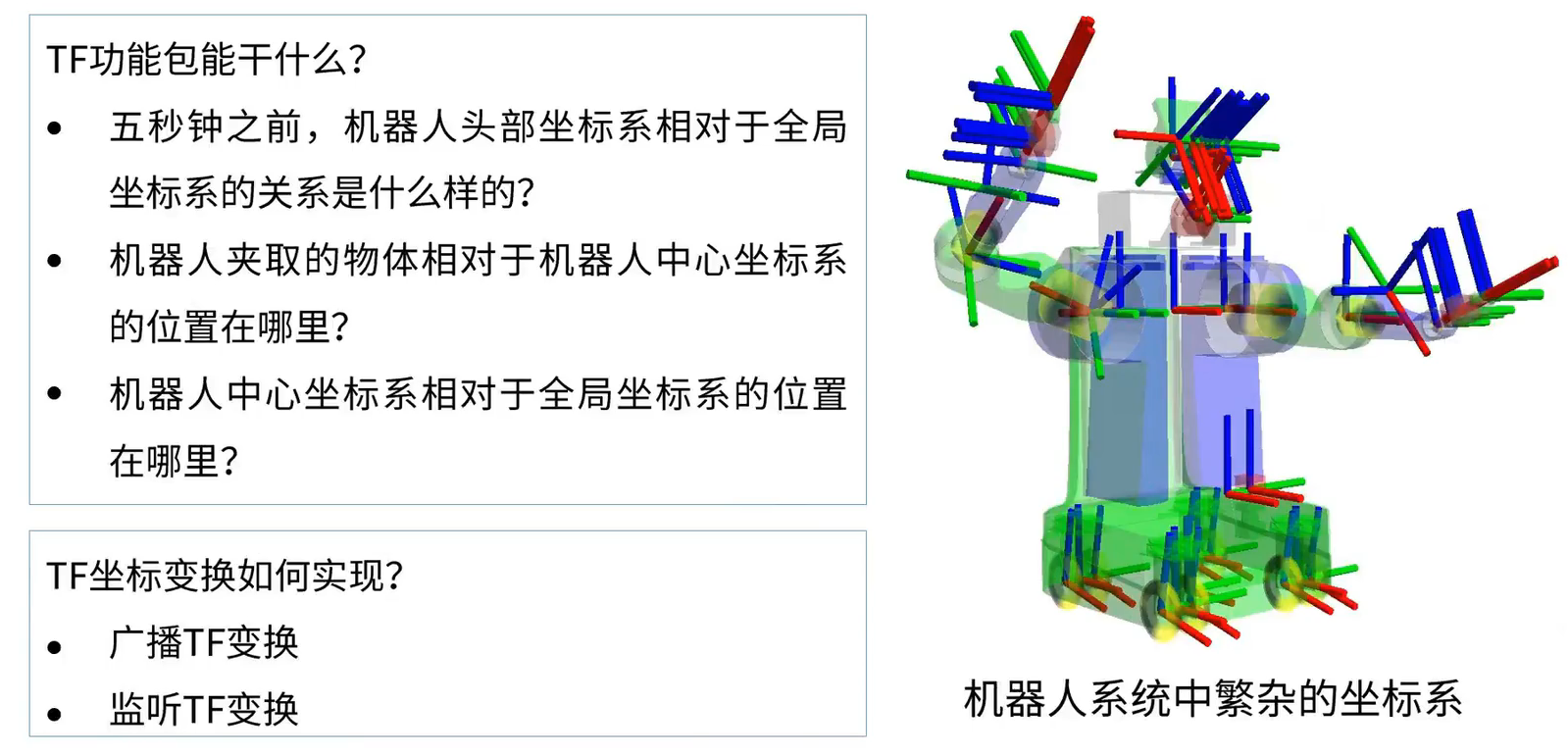
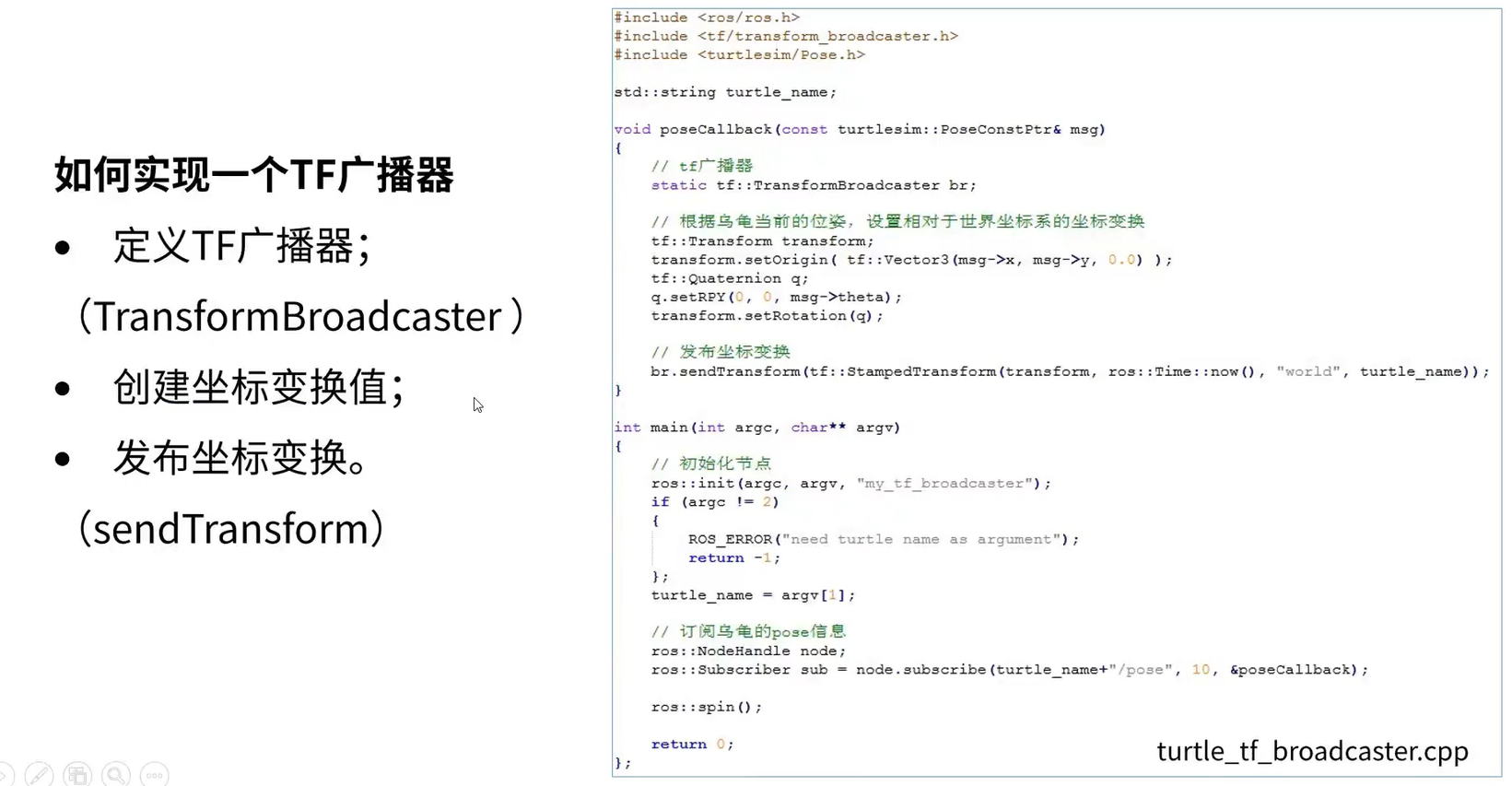
如何实现一个 TF 广播器
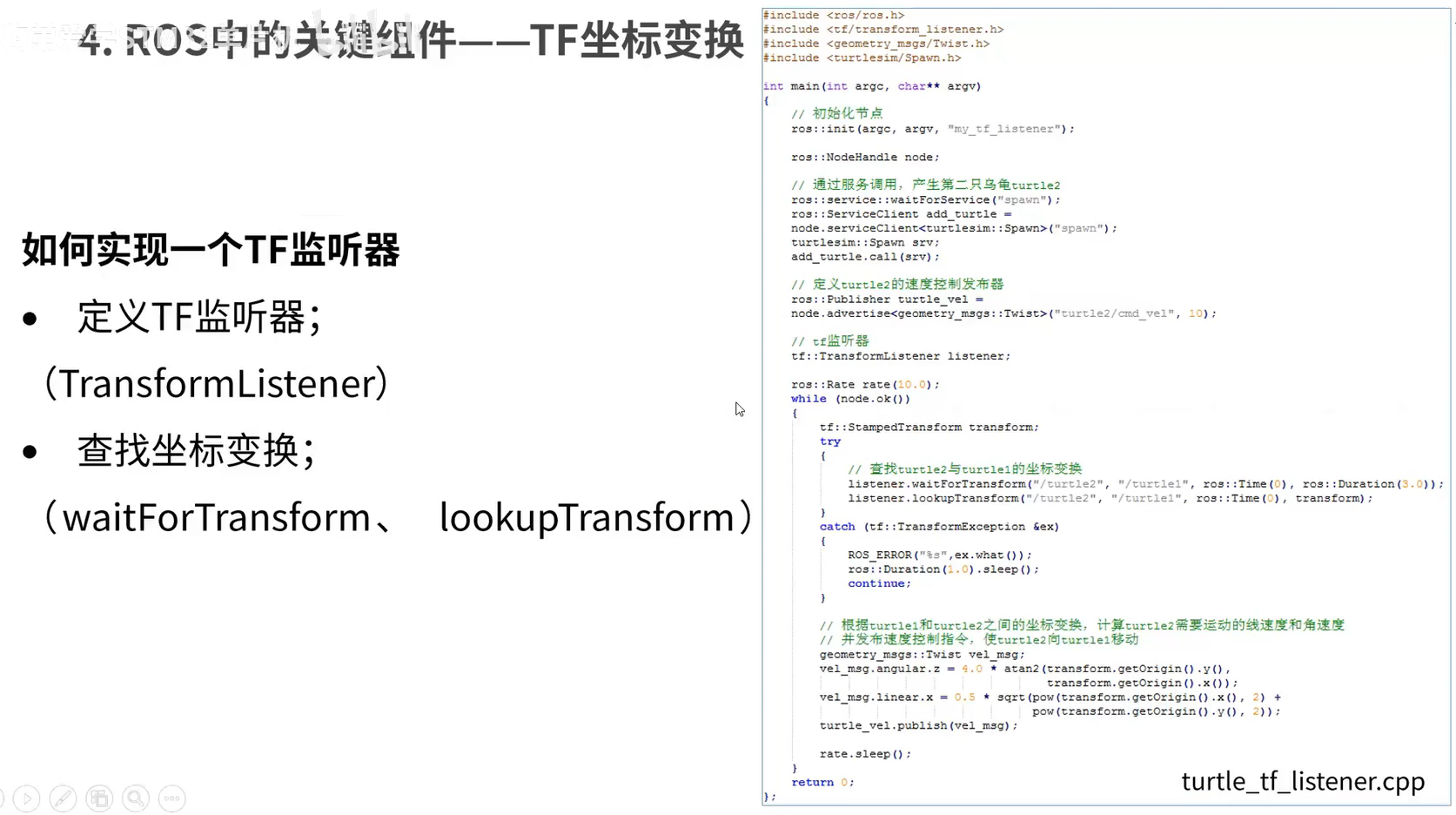
如何实现一个 TF 监听器
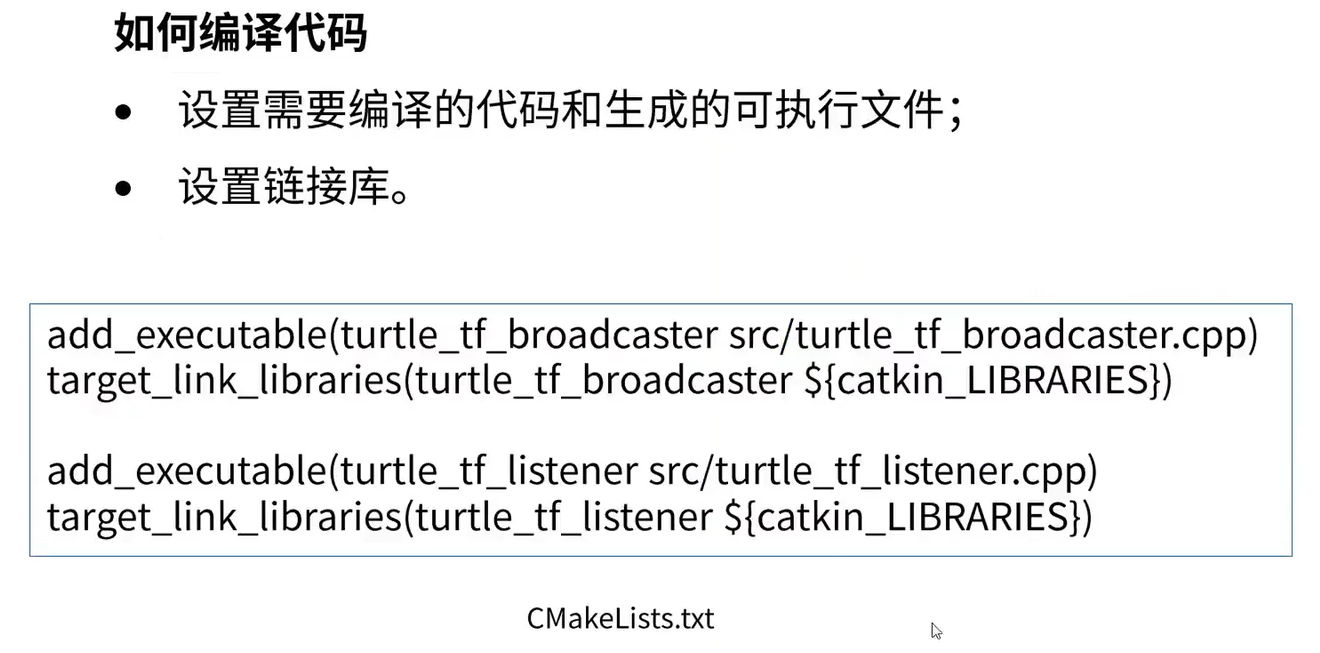
如何编译代码
例程

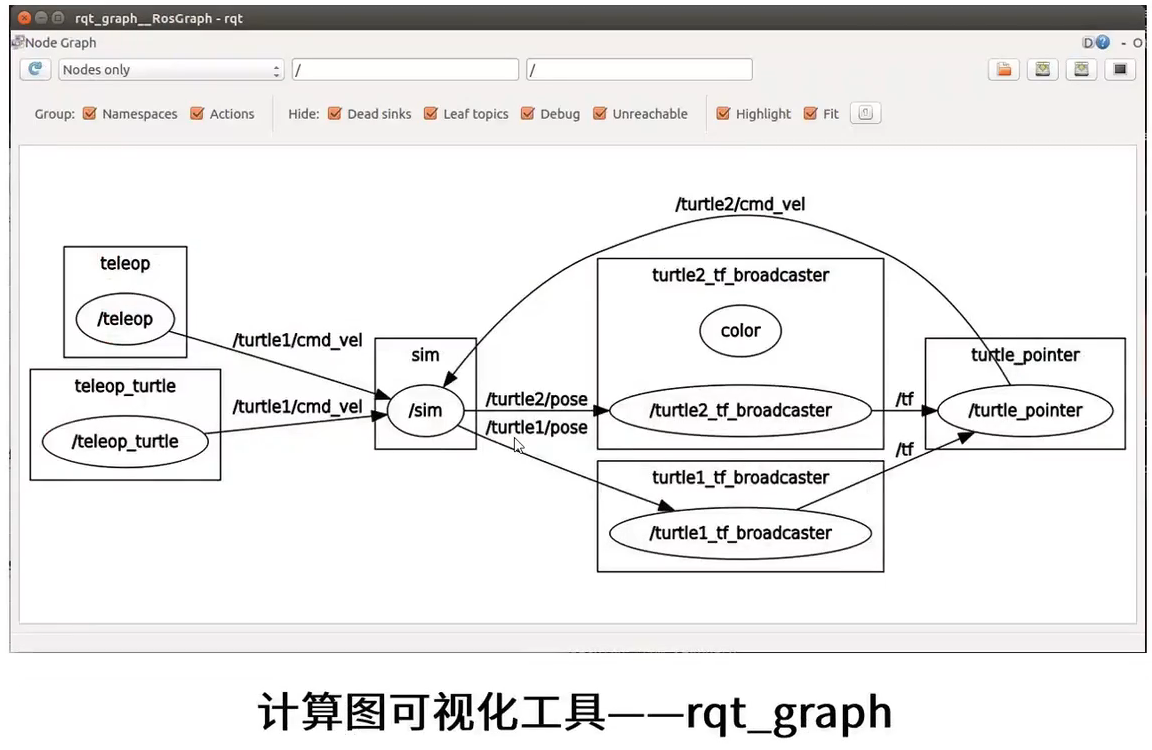
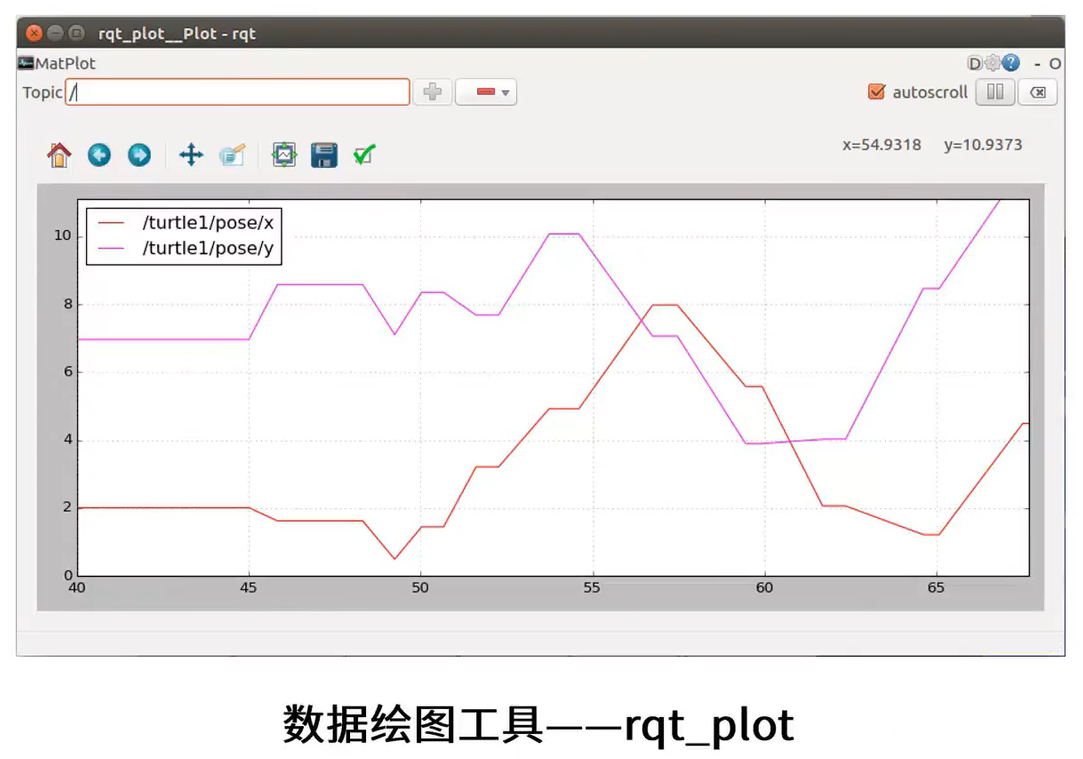
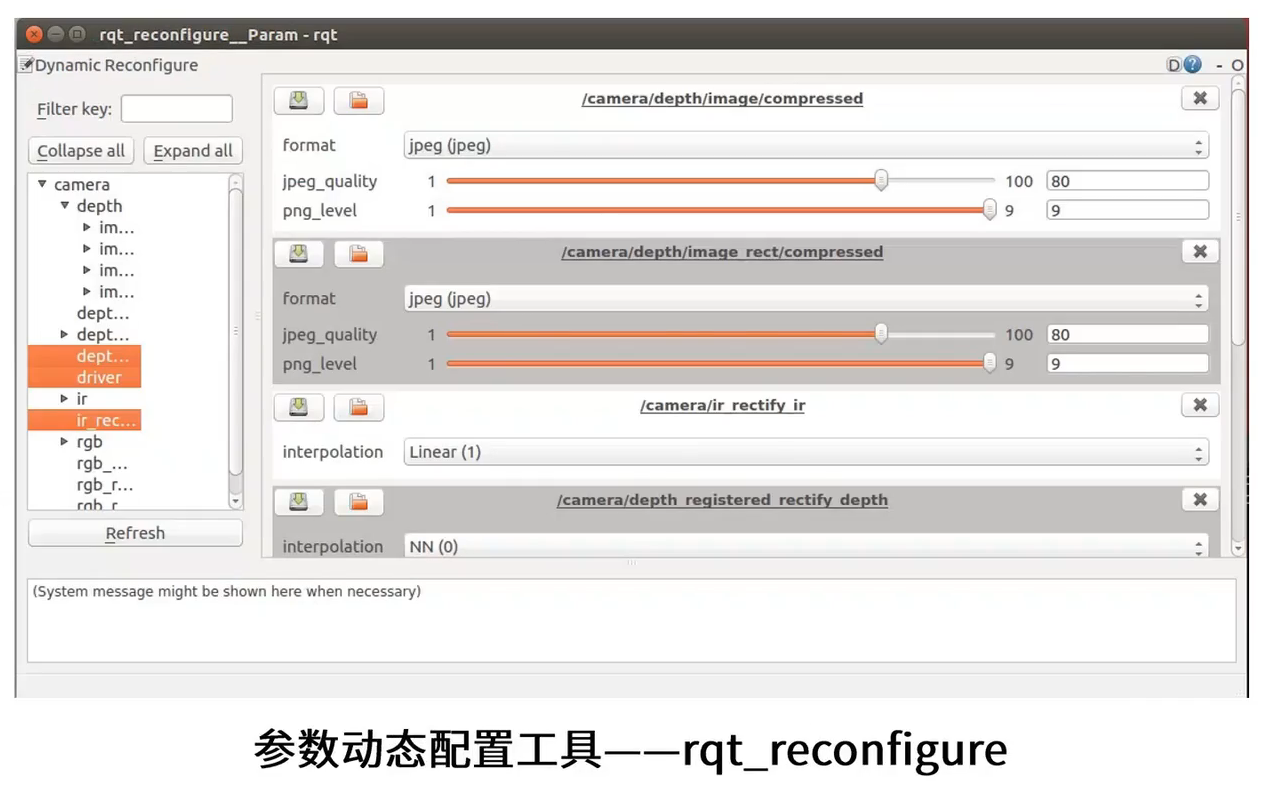
Qt 工具箱

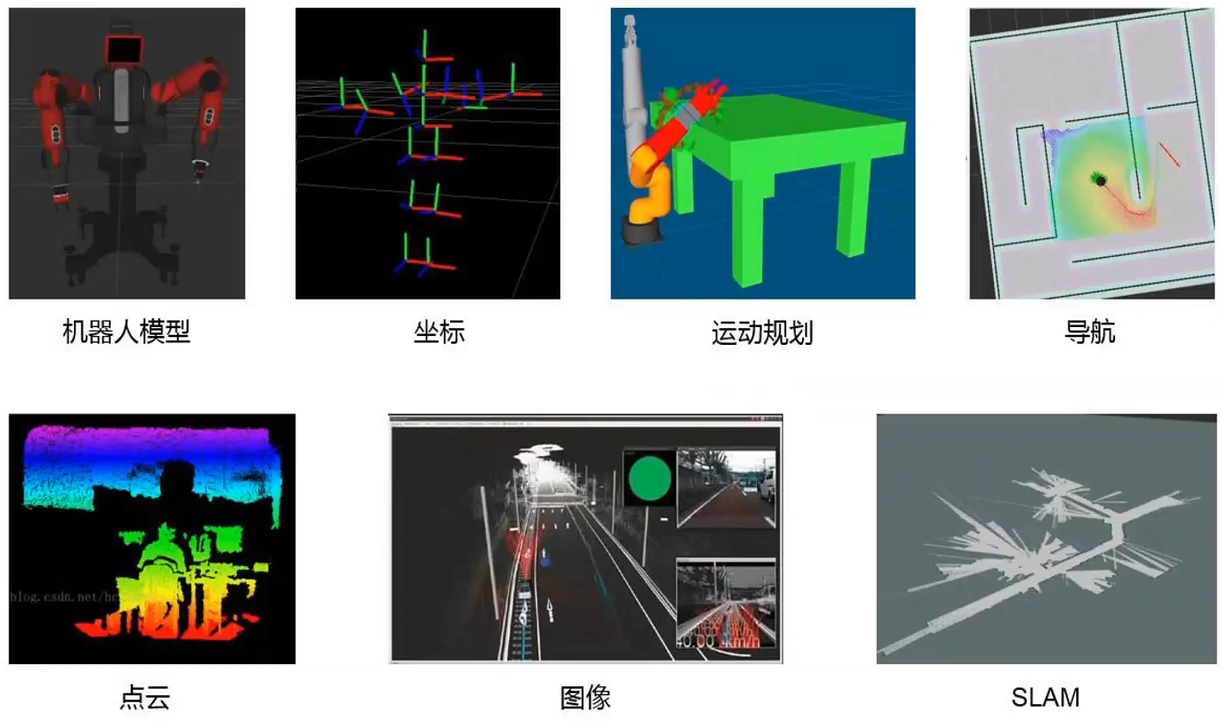
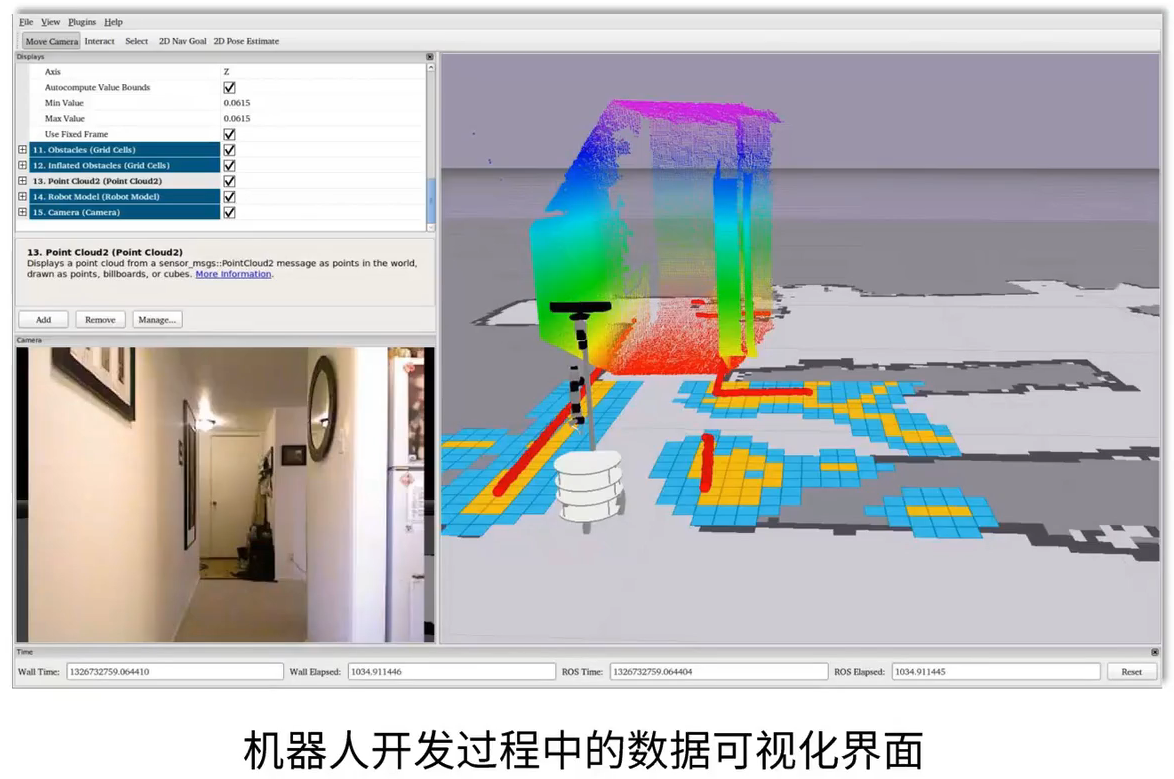
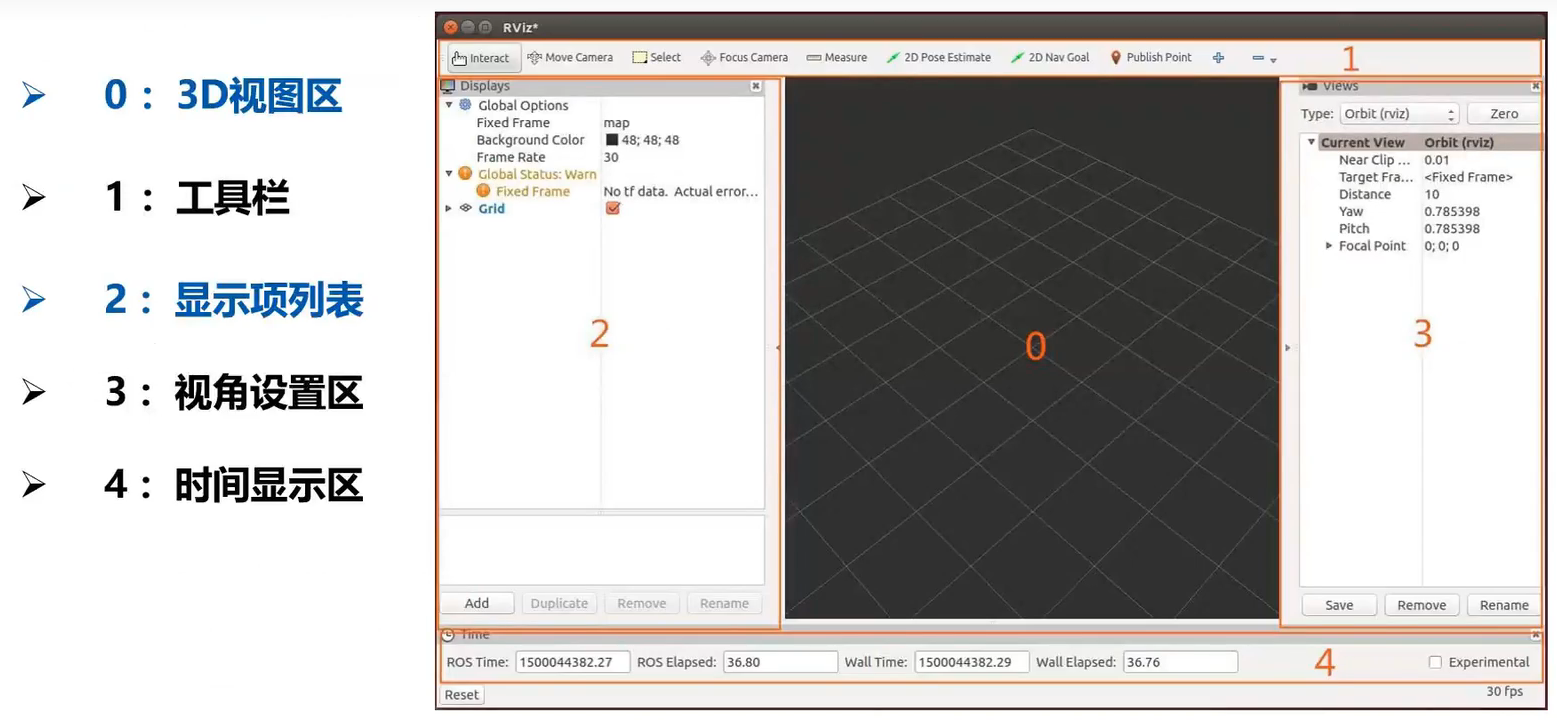
Rviz 可视化平台

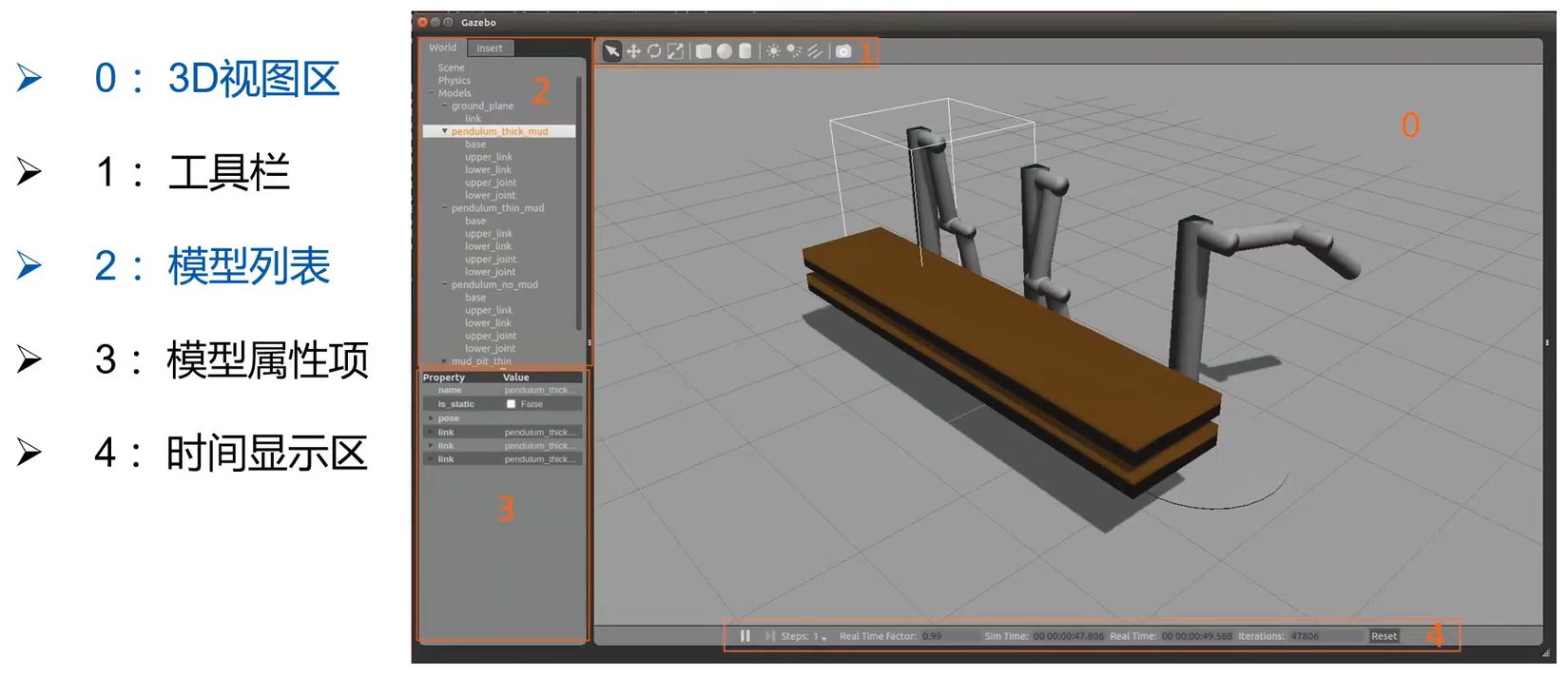
Gazebo物理仿真环境


 浙公网安备 33010602011771号
浙公网安备 33010602011771号