[ROS]2 尝试编译OrbSLAM
主要参考http://blog.csdn.net/dourenyin/article/details/48055441
1.编译g2o的过程中,
先是出现Eigen3依赖项的问题,要求Eigen3最低版本是3.1.0,而我的ROS上的版本是3.0.5.
于是下载了一个3.2.7的包进行编译并安装。
执行make命令,又出现如下两个错误。

解决方法:通过命令查看
$ gcc -march=native -Q --help=target | grep march
接下来修改CMakelists.txt文件
SET(CMAKE_CXX_FLAGS)项中-march=native中的native 设置成corei7-avx
https://github.com/raulmur/ORB_SLAM 此处安装部分有具体说明。
参考:http://stackoverflow.com/questions/17126593/compile-errors-with-assembler-messages

2.编译OpenCV的时候出现如下错误:
make[2]: *** [modules/nonfree/CMakeFiles/opencv_perf_nonfree.dir/perf/perf_main.cpp.o] Error 1
make[1]: *** [modules/nonfree/CMakeFiles/opencv_perf_nonfree.dir/all] Error 2
make: ***[all] Error 2
在编译之前执行如下命令,怀疑会有后遗症,参考http://stackoverflow.com/questions/25354147/error-building-opencv-dumpopencldevice-method-error
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D WITH_OPENCL=OFF -D WITH_CUDA=OFF -D BUILD_opencv_gpu=OFF -D BUILD_opencv_nonfree=OFF -D BUILD_opencv_stitching=OFF -D BUILD_opencv_superres=OFF ..
3.编译OrbSLAM的时候注意文件夹名称和ROS工作空间名称为ORB_SLAM.
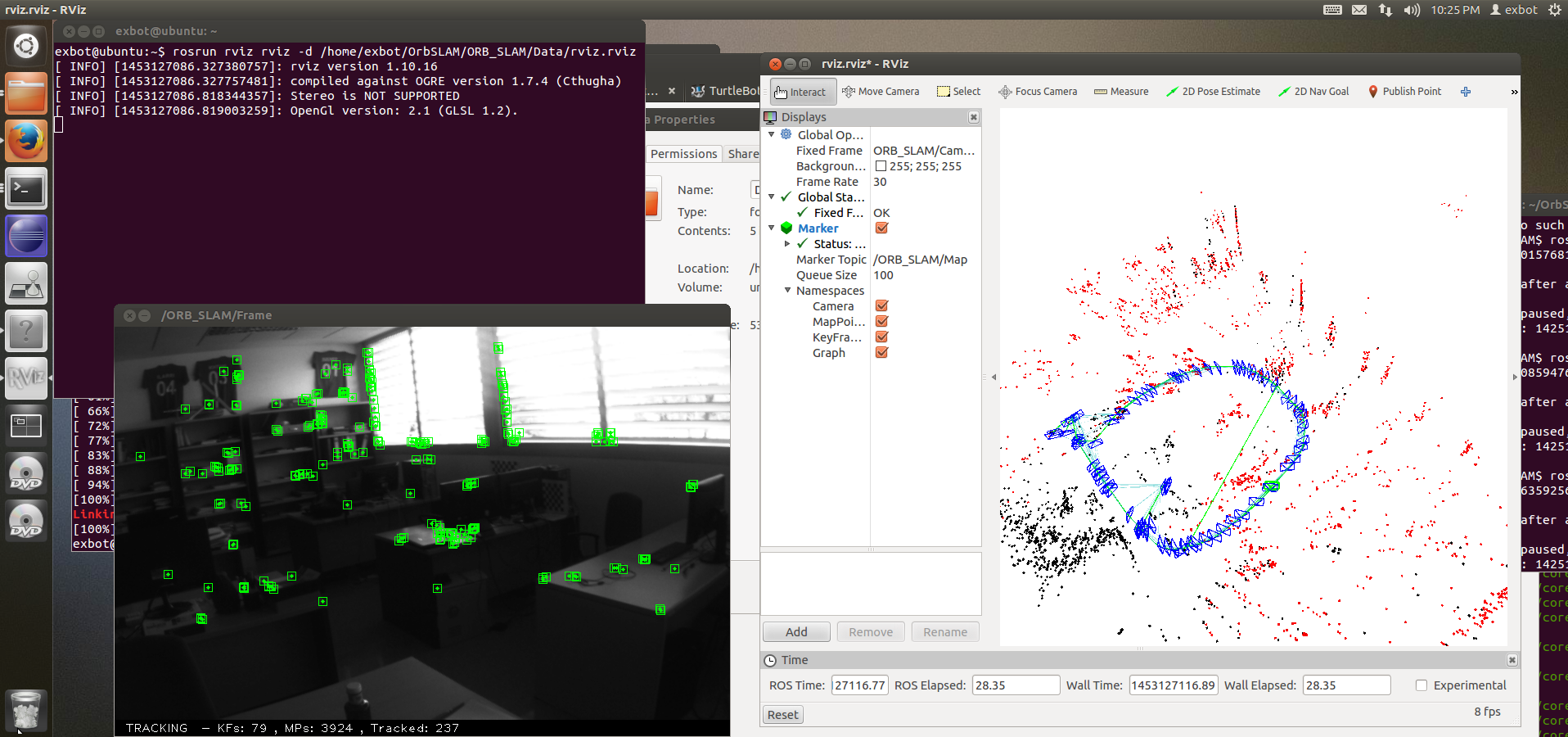
自己录了个视频记录一下成果http://www.tudou.com/programs/view/da6nQ9x6LWE/
作者:太一吾鱼水
文章未经说明均属原创,学习笔记可能有大段的引用,一般会注明参考文献。
欢迎大家留言交流,转载请注明出处。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号