ContextCapture无人机影像与激光点云融合建模感受
一直对空地融合和无人机与激光点云融合抱有很大的期待,限于没有很好的激光点云设备,一直没有实验看看结果如何。最近入手了一台RS10,终于有高精度带地理坐标的激光点云数据了,然后就实验了一下。
设照片数据建模为 A,点云为B(点云数据相对精度5cm以内)。
1.首先遇到的一个问题是,导入的las点云颜色丢失。
采用CoPre导出las 1.2点云和轨迹PosL,将PosL文件后缀改成txt,将导出的las文件在CloudCompare打开,颜色强制转换为8bit(不转换在CC中颜色显示为黑色),然后再另存为las 1.2。

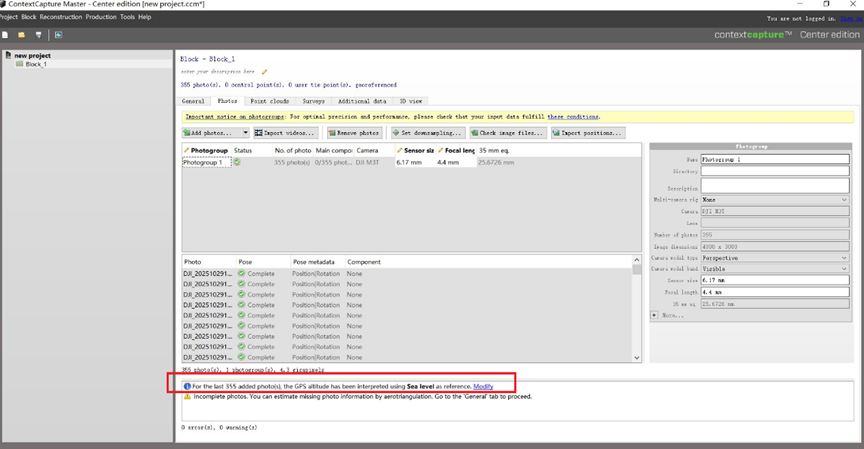
2.导入的点云与无人机影像空三后的稀疏点云产生了垂直方向的偏差,大约8-10m。
这里的问题是导入照片的时候默认采用的是sealevel了(海拔高程,正高),是WGS84大地高+EGM96大地水准面起伏(geoid undulation)。[参考]
地面手持激光扫描仪采用的是CGCS2000 RTK优化,高程存储的是大地高,本身WGS84大地高和CGCS2000大地高相差顶多也就29mm。
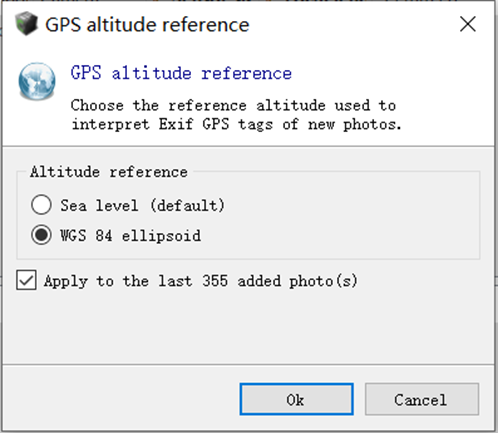
解决方案:导入照片的时候采用文件夹导入,设置照片的高程为大地高。
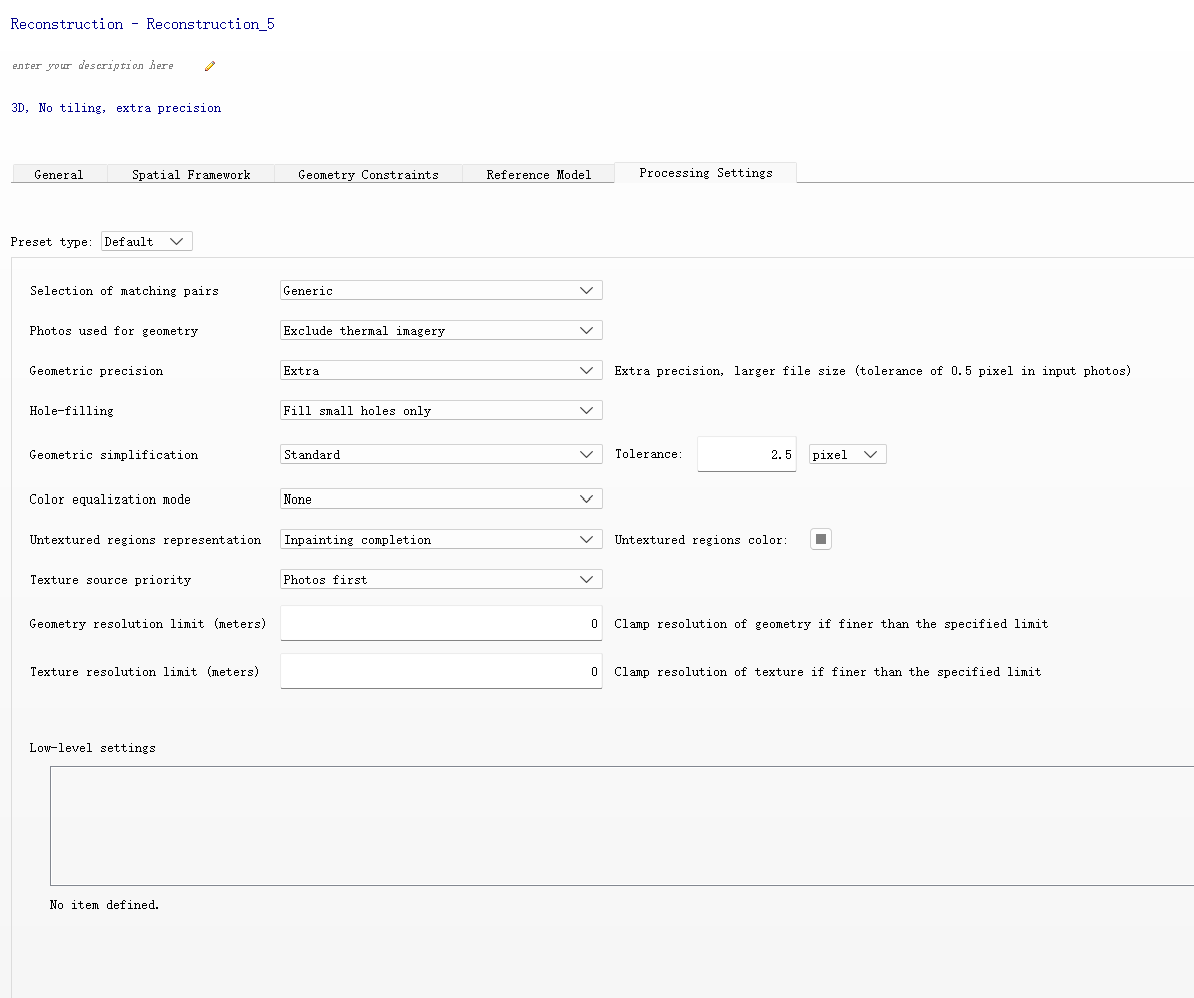
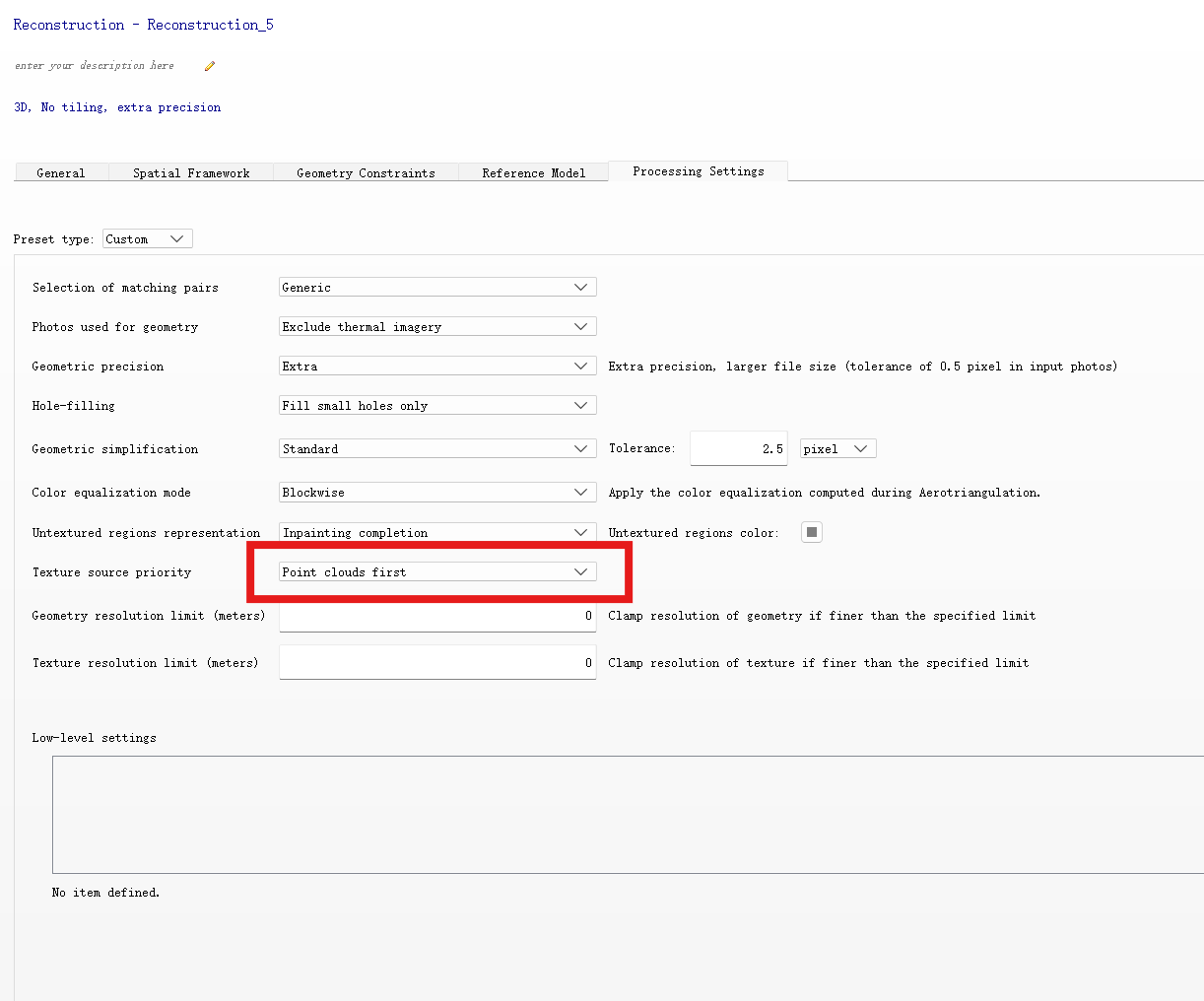
3.建模的时候设置纹理来源,默认是Photos first,改为Point clouds first或者smart
4.建模结果给我的感觉就是:
路面精度明显提高,路牙石边缘清晰,比单纯使用照片建模路面不平整的情况显著改善。
如果完全没有照片的地方,用点云数据可以得到很好的效果;建模精度因为点云加入显著提升;(图中左侧楼房为单纯的照片建模,右侧建筑为融合激光点云建模)

但是如果同时有照片和点云,那么只能锦上添花,无法有效的消除存在很大偏差的数据。也就是说A和B数据不能偏差太大,如果偏差太大,偏差的部分没有办法被消除,会存在精确和异常偏差同时存在的情况。

对比单纯利用激光点云进行三维重建效果如下:

从美观的角度来看,如果二者融合,整体有很大的提高,但是仍然说不上非常美观。也就是说如果想建模特别美观,照片拍摄本身就要质量很高(完整,精度较高)!
比我预想的各取所长还是有很大的距离。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号