
三维点云变换
对三维点云可以进行旋转,平移,缩放等变换。用于表示旋转,平移,缩放等变换的矩阵的定义原理参看相机标定原理
- 方式1:使用
Eigen::Matrix4f定义旋转平移矩阵
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/common/transforms.h>
using namespace std;
int main() {
pcl::PointCloud<pcl::PointXYZ>::Ptr point_cloud(new pcl::PointCloud<pcl::PointXYZ>());
pcl::io::loadPCDFile("dataset/rabbit.pcd", *point_cloud);
// 使用旋转平移矩阵绕z轴进行变换
// 定义一个4*4的单位阵
Eigen::Matrix4f transform_matrix = Eigen::Matrix4f::Identity();
// 旋转PI/4
float theta = M_PI / 4;
transform_matrix(0, 0) = cos(theta);
transform_matrix(0, 1) = -sin(theta);
transform_matrix(1, 0) = sin(theta);
transform_matrix(1, 1) = cos(theta);
// 在 X 轴上定义一个 2.5 米的平移.
transform_matrix(0, 3) = 2.5;
pcl::PointCloud<pcl::PointXYZ>::Ptr transformed_cloud(new pcl::PointCloud<pcl::PointXYZ>());
pcl::transformPointCloud(*point_cloud, *transformed_cloud, transform_matrix);
pcl::visualization::PCLVisualizer viewer("Matrix transformation example");
int v1(0), v2(1);
viewer.createViewPort(0.0, 0.0, 0.5, 1.0, v1);
viewer.createViewPort(0.5, 0.0, 1.0, 1.0, v2);
// 为点云定义 R,G,B 颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> source_cloud_color_handler(point_cloud, 255, 255, 0);
// 输出点云到查看器,使用颜色管理
viewer.addPointCloud(point_cloud, source_cloud_color_handler, "original_cloud", v1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> transformed_cloud_color_handler(transformed_cloud, 0, 255, 0);
viewer.addPointCloud(transformed_cloud, transformed_cloud_color_handler, "transformed_cloud", v2);
viewer.addCoordinateSystem(4.0, "cloud", 0);
viewer.setBackgroundColor(0.05, 0.05, 0.05, 0); // 设置背景为深灰
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "original_cloud");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "transformed_cloud");
while (!viewer.wasStopped()) {
viewer.spinOnce();
}
return 0;
}
- 方式2:使用
Eigen::Affine3f定义旋转平移矩阵。
// 使用旋转平移矩阵绕z轴进行变换
// 定义一个4*4的单位阵
Eigen::Affine3f transform_matrix = Eigen::Affine3f::Identity();
// 绕x轴平移2.5
transform_matrix.translation() << 2.5, 0, 0;
float theta = M_PI / 2;
transform_matrix.rotate(Eigen::AngleAxisf(theta, Eigen::Vector3f::UnitZ()));
pcl::PointCloud<pcl::PointXYZ>::Ptr transformed_cloud(new pcl::PointCloud<pcl::PointXYZ>());
pcl::transformPointCloud(*point_cloud, *transformed_cloud, transform_matrix);
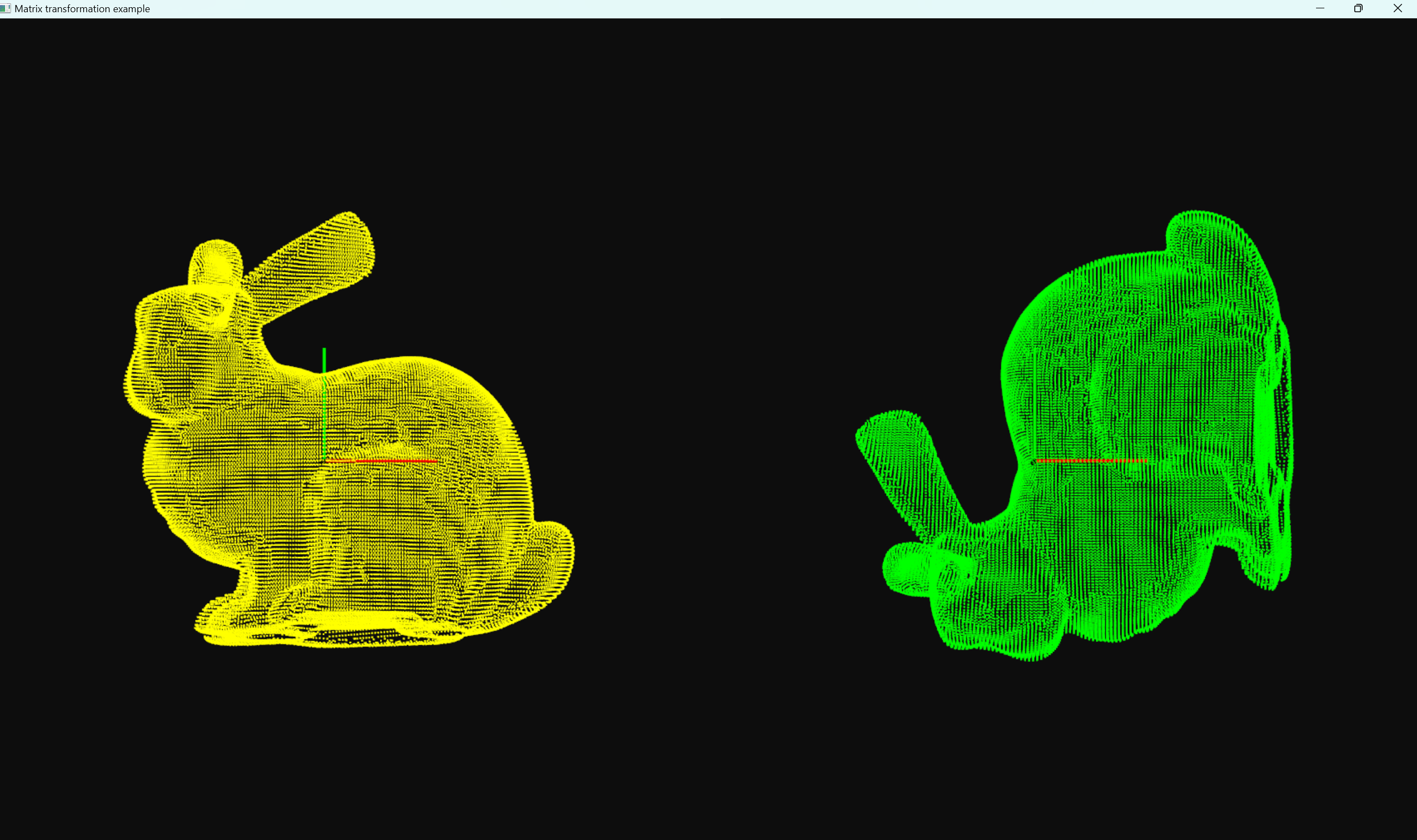
- 运行结果如下所示:
![]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号