从点云中提取杆状物算法
转载请注明出处:https://www.cnblogs.com/wellp/p/9486130.html
基于PCL的条件欧拉聚类(ConditionalEuclideanClustering)和RANSAC拟合直线的一种从点云中提取pole的算法,核心思想就是先水平聚类,选择出直径小的cluster,然后竖直聚类,主要过程如下:
1.将点云根据point.z的大小sort。
2.设置z_resolution,从下到上,对每一层的点云进行欧拉聚类,每一层的点云高度为z_resolution。
3.保留直径小于一定threshold的cluster。
4.对保留下来的points做竖直方向的条件欧拉聚类,setClusterTolerance设置的大一些,但是要加条件函数来限制生长的方向,condition_function如下:
1 condition_function(point_type point0, point_type point1) 2 { 3 float dis_horizon = sqrt(pow(point0.x - point1.x, 2) + (pow(point0.y - point1.y, 2)); 4 return dis_horizon < dis_threshold;//dis_threshold should be small enough to control grow direction 5 }
5.上述过程提取的pole可能如图1所示(带有两侧的灯杆),因为condition_function虽然限制了生长方向主要是竖直方向,但是因为其中的dis_threshold不等于0(也不能为0,因为杆内部的点要聚类到一起),所以再进行RANSAC拟合直线,完成pole的提取,如图2所示。
6.对杆上端的周围点云进行PCA分析,判断是树冠,广告牌还是灯支撑杆,进而过滤掉树干。
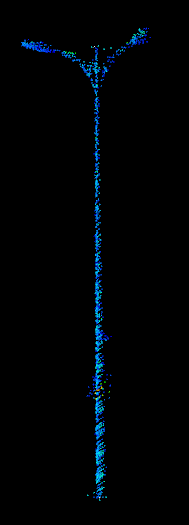
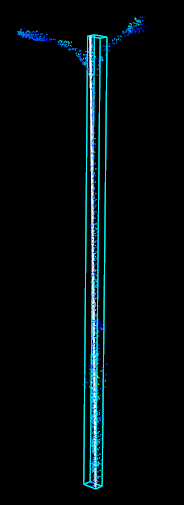
图1 图2

 浙公网安备 33010602011771号
浙公网安备 33010602011771号