

MATLAB对视频中的动态目标进行跟踪检测
一、核心思路与流程
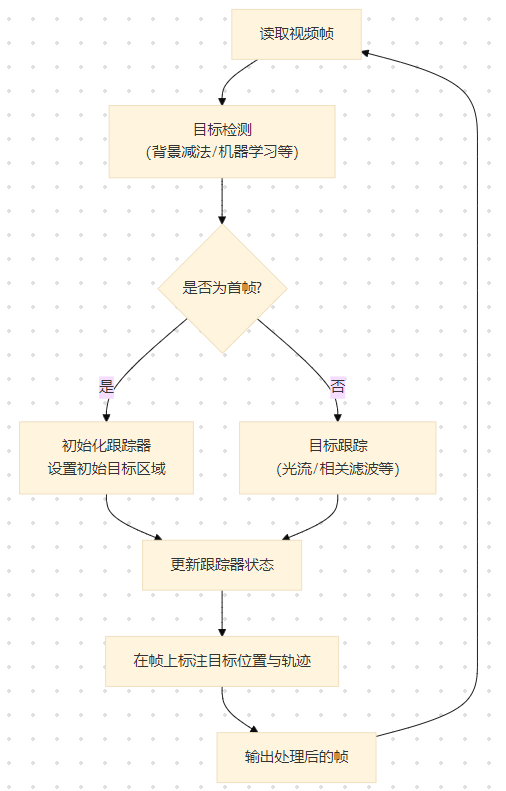
动态目标跟踪检测通常包含两个核心步骤:
- 目标检测:在每一帧(或定期地)确定目标的位置。
- 目标跟踪:将不同帧中检测到的同一目标关联起来,形成连续、平滑的运动轨迹。
其通用流程如下图所示:
二、方法一:基于“检测-跟踪”的策略 (现代且鲁棒)
这是目前最主流的方法。首先使用一个强大的检测器在每一帧中找到所有可能的目标,然后将这些检测结果跨帧关联起来。
使用 YOLOv4 深度学习检测器 + 跟踪器
MATLAB 使得调用预训练的深度学习模型变得非常简单。
% 方法一:基于YOLOv4检测器的跟踪
% 1. 加载预训练的YOLOv4目标检测器
pretrained = load('yolov4Coco.mat');
detector = pretrained.yolov4Detector;
% 2. 设置要跟踪的目标类别(例如 'person')
targetClass = "person";
% 3. 创建视频读写对象
videoFileReader = VideoReader('your_video.mp4');
videoPlayer = vision.DeployableVideoPlayer; % 用于实时显示
% 4. 创建多目标跟踪器(使用GNN分配算法)
tracker = multiObjectTracker(...
'FilterInitializationFcn', @initBboxFilter, ...
'AssignmentThreshold', 30, ... % 关联阈值
'ConfirmationThreshold', [5 6], ... % 确认阈值
'DeletionThreshold', 5); % 删除阈值
% 5. 循环处理每一帧
while hasFrame(videoFileReader)
frame = readFrame(videoFileReader); % 读取当前帧
[bboxes, scores, labels] = detect(detector, frame); % YOLOv4检测
% 6. 筛选特定类别的检测结果
targetIdx = labels == targetClass;
bboxes = bboxes(targetIdx, :);
scores = scores(targetIdx, :);
% 7. 将检测结果传递给跟踪器
detections = cell(size(bboxes,1),1);
for i = 1:size(bboxes,1)
detections{i} = objectDetection(frame.Time, bboxes(i,:), ...
'ObjectAttributes', struct('Score', scores(i)));
end
confirmedTracks = tracker(detections, frame.Time); % 更新跟踪器
% 8. 在帧上显示结果
if ~isempty(confirmedTracks)
frame = helperDrawTracks(frame, confirmedTracks); % 自定义画轨迹函数
end
videoPlayer(frame); % 显示
end
release(videoPlayer);
% --- 辅助函数:初始化用于跟踪边界框的卡尔曼滤波器 ---
function filter = initBboxFilter(detection)
% 使用匀速模型
initialState = [detection.Measurement(1:2); 0; 0; detection.Measurement(3:4); 0; 0];
filter = trackingKF('MotionModel', '2D Constant Velocity', ...
'State', initialState, ...
'MeasurementModel', eye(6), ...
'MeasurementNoise', diag([10,10,100,100]));
end
优点:非常强大,对遮挡、形变鲁棒性好,能处理多目标。
缺点:依赖于检测器的性能,计算量较大。
三、方法二:基于经典计算机视觉的方法 (轻量且快速)
适用于背景相对简单、实时性要求高的场景。
基于光流法的点跟踪
% 方法二:基于KLT光流法的特征点跟踪
% 1. 读取视频
videoReader = VideoReader('your_video.mp4');
videoPlayer = vision.DeployableVideoPlayer();
% 2. 读取第一帧并选择跟踪区域
oldFrame = readFrame(videoReader);
figure; imshow(oldFrame);
title('Select a region to track');
roi = drawrectangle; % 交互式绘制矩形区域
bbox = roi.Position; % 获取区域位置[x, y, w, h]
points = detectMinEigenFeatures(rgb2gray(oldFrame), 'ROI', bbox); % 检测角点
pointTracker = vision.PointTracker('MaxBidirectionalError', 2); % 创建点跟踪器
initialize(pointTracker, points.Location, oldFrame); % 初始化跟踪器
% 3. 初始化轨迹可视化
oldPoints = points.Location;
trajectory = oldPoints;
% 4. 循环处理后续帧
while hasFrame(videoReader)
newFrame = readFrame(videoReader);
[newPoints, isFound] = pointTracker(newFrame); % 跟踪点
visiblePoints = newPoints(isFound, :);
oldInliers = oldPoints(isFound, :);
if size(visiblePoints, 1) >= 2
% 估计点集之间的几何变换(应对仿射变换)
[xform, ~, ~] = estimateGeometricTransform(...
oldInliers, visiblePoints, 'similarity', 'MaxDistance', 4);
% 利用变换更新初始的边界框
bboxPoints = transformPointsForward(xform, bbox2points(bbox));
bbox = points2bbox(bboxPoints); % 将点转换回bbox格式
% 更新轨迹
trajectory = [trajectory; mean(visiblePoints, 1)]; % 简单平均点位置作为轨迹点
% 在当前帧上绘制边界框和轨迹
newFrame = insertShape(newFrame, 'Rectangle', bbox, ...
'LineWidth', 3, 'Color', 'green');
newFrame = insertMarker(newFrame, trajectory, ...
'Color', 'red', 'Size', 3);
% 为下一帧重置点
oldPoints = visiblePoints;
setPoints(pointTracker, oldPoints);
end
videoPlayer(newFrame); % 显示
end
release(videoPlayer);
release(pointTracker);
优点:计算速度快,易于实现。
缺点:对快速运动、遮挡、大幅形变敏感,需要手动初始化。
参考代码 用MATLAB对视频中的动态目标进行跟踪检测 www.3dddown.com/cna/53580.html
四、方法选择与技巧
| 方法 | 适用场景 | 优点 | 缺点 |
|---|---|---|---|
| 深度学习检测+跟踪 | 复杂场景、多目标、高精度要求 | 精度高,鲁棒性强,自动化程度高 | 计算资源需求大,需要预训练模型 |
| 光流法点跟踪 | 简单背景、实时应用、单目标 | 速度快,计算量小,易于实现 | 对遮挡敏感,需手动初始化,漂移问题 |
| 背景减除法 | 静态摄像头、固定背景 | 实现简单,能检测未知目标 | 对光线变化、动态背景敏感 |
提升性能的通用技巧:
- 预处理:对视频帧进行去噪、灰度化、直方图均衡化等操作,可以提升检测和跟踪的稳定性。
- 卡尔曼滤波:如上文
multiObjectTracker所做,用它来预测目标下一帧的位置,可以处理短时遮挡,并使轨迹更平滑。 - 数据关联:对于多目标,使用匈牙利算法等解决检测框和跟踪轨迹之间的匹配问题。
- 轨迹管理:为每个跟踪目标分配唯一ID,并管理其生命期(新建、确认、预测、删除)。
总结
在MATLAB中实现动态目标跟踪,推荐从以下路径入手:
- 如果你是初学者:先从方法二(光流法) 开始,理解视频处理、特征点和跟踪的基本概念。
- 如果你要解决实际工程问题:直接采用方法一(深度学习检测-跟踪),这是目前最强大、最通用的方案。MATLAB的
multiObjectTracker和预训练的检测器(YOLO, SSD, Faster R-CNN)为你提供了强大的基础,让你能快速搭建一个高性能的跟踪系统。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号