摘要:  随着人工智能与机器人技术的深度融合,人形机器人正从实验室走向工业制造、医疗护理、公共服务等真实场景。然而,要让机器人真正"像人类一样工作",其动作的流畅性、精准度与环境适应性仍是技术突破的关键。Xsens动作捕捉系统通过创新的拟人化动作AI训练方案,为机器人赋予更接近人类的运动能力,成为推动行业升级 阅读全文
随着人工智能与机器人技术的深度融合,人形机器人正从实验室走向工业制造、医疗护理、公共服务等真实场景。然而,要让机器人真正"像人类一样工作",其动作的流畅性、精准度与环境适应性仍是技术突破的关键。Xsens动作捕捉系统通过创新的拟人化动作AI训练方案,为机器人赋予更接近人类的运动能力,成为推动行业升级 阅读全文
随着人工智能与机器人技术的深度融合,人形机器人正从实验室走向工业制造、医疗护理、公共服务等真实场景。然而,要让机器人真正"像人类一样工作",其动作的流畅性、精准度与环境适应性仍是技术突破的关键。Xsens动作捕捉系统通过创新的拟人化动作AI训练方案,为机器人赋予更接近人类的运动能力,成为推动行业升级 阅读全文
posted @ 2025-09-11 21:25
虚拟现实产品超市
阅读(35)
评论(0)
推荐(0)
摘要:  为您的项目提供技术和经验 自2001年以来,HAPTION力反馈设备已被用于广泛的研究应用。 您是否希望在您的项目中使用HAPTION力反馈设备 您是否正在寻找国内厂商来申请新项目 增强人机交互-远程操作,实现人机交互 图片 图片 通过最先进的社交、视觉、触觉、音频和嗅觉技术的出色组合,为操作员创造 阅读全文
为您的项目提供技术和经验 自2001年以来,HAPTION力反馈设备已被用于广泛的研究应用。 您是否希望在您的项目中使用HAPTION力反馈设备 您是否正在寻找国内厂商来申请新项目 增强人机交互-远程操作,实现人机交互 图片 图片 通过最先进的社交、视觉、触觉、音频和嗅觉技术的出色组合,为操作员创造 阅读全文
为您的项目提供技术和经验 自2001年以来,HAPTION力反馈设备已被用于广泛的研究应用。 您是否希望在您的项目中使用HAPTION力反馈设备 您是否正在寻找国内厂商来申请新项目 增强人机交互-远程操作,实现人机交互 图片 图片 通过最先进的社交、视觉、触觉、音频和嗅觉技术的出色组合,为操作员创造 阅读全文
posted @ 2025-09-11 21:16
虚拟现实产品超市
阅读(21)
评论(0)
推荐(0)
 机器人夹爪企业TESOLLO参加人工智能及机器人产业。 此次论坛是2025中关村论坛的一部分,该论坛于27日开始,为期五天。中关村论坛是中国科技领域最重要的国际盛会。今年的论坛以“创新与发展”为主题,旨在为中国国家创新战略指明方向,加速科技合作与进步。去年中关村论坛吸引了来自102个国家的约2.3万
机器人夹爪企业TESOLLO参加人工智能及机器人产业。 此次论坛是2025中关村论坛的一部分,该论坛于27日开始,为期五天。中关村论坛是中国科技领域最重要的国际盛会。今年的论坛以“创新与发展”为主题,旨在为中国国家创新战略指明方向,加速科技合作与进步。去年中关村论坛吸引了来自102个国家的约2.3万  随着人形机器人在现实世界的应用中变得越来越普遍,了解实现其类似人类运动的技术至关重要。在Xsens我们满怀热情地探索这一领域,致力于为人形机器人训练开发最佳的动作捕捉解决方案。为了帮助您更好地理解所遇到的术语,我们创建了一份概述,概述了塑造人形机器人运动训练未来的术语和方法。 图片 图片 人形机器人
随着人形机器人在现实世界的应用中变得越来越普遍,了解实现其类似人类运动的技术至关重要。在Xsens我们满怀热情地探索这一领域,致力于为人形机器人训练开发最佳的动作捕捉解决方案。为了帮助您更好地理解所遇到的术语,我们创建了一份概述,概述了塑造人形机器人运动训练未来的术语和方法。 图片 图片 人形机器人  Manus Metagloves Pro虚拟现实手套 使用Manus Metagloves Pro精确的量子追踪技术捕捉每一个细节动作。您的手指捕捉将不再有任何限制。Manus Metagloves Pro可帮助您节省在制作动画时的宝贵时间,提供更加真实的手部动作表现。 图片 图片 图片 Manus
Manus Metagloves Pro虚拟现实手套 使用Manus Metagloves Pro精确的量子追踪技术捕捉每一个细节动作。您的手指捕捉将不再有任何限制。Manus Metagloves Pro可帮助您节省在制作动画时的宝贵时间,提供更加真实的手部动作表现。 图片 图片 图片 Manus  Tesollo使用其四指多关节夹持器DG-4F展示了适用于显示器行业的解决方案。演示了使用新型DG-4F精确移除和重新粘贴显示屏上保护膜的自动化流程,引起了参观者的浓厚兴趣。 通过此次演示,Tesollo证明了显示器制造过程中的自动化潜力以及DG-4F的技术竞争力。 Tesollo的DG-4F解决方
Tesollo使用其四指多关节夹持器DG-4F展示了适用于显示器行业的解决方案。演示了使用新型DG-4F精确移除和重新粘贴显示屏上保护膜的自动化流程,引起了参观者的浓厚兴趣。 通过此次演示,Tesollo证明了显示器制造过程中的自动化潜力以及DG-4F的技术竞争力。 Tesollo的DG-4F解决方  机器人训练新时代 MANUS Metagloves Pro数据手套助力机器人训练迈向新高度! 图片 💥 全新指尖传感器,带来前所未有的精确度。 💥 优化设计,集成传感器,数秒内即可开始录制。 💥 可更换模块,灵活扩展,极大降低成本。 Metagloves Pro专业版,专为高精度需求的客户打造
机器人训练新时代 MANUS Metagloves Pro数据手套助力机器人训练迈向新高度! 图片 💥 全新指尖传感器,带来前所未有的精确度。 💥 优化设计,集成传感器,数秒内即可开始录制。 💥 可更换模块,灵活扩展,极大降低成本。 Metagloves Pro专业版,专为高精度需求的客户打造  在科技飞速发展的今天,力反馈遥操作机器人正逐渐成为各行业关注的焦点。这项前沿技术不仅突破了传统远程操作的局限,更以其卓越的性能和广泛的应用场景,为我们的生产生活带来了前所未有的便利与变革。 图片 力反馈遥操作机器人平台,构建了一整套真实可靠的人机交互场景,即通过手持遥操作主手设备在远程环境下操纵工业
在科技飞速发展的今天,力反馈遥操作机器人正逐渐成为各行业关注的焦点。这项前沿技术不仅突破了传统远程操作的局限,更以其卓越的性能和广泛的应用场景,为我们的生产生活带来了前所未有的便利与变革。 图片 力反馈遥操作机器人平台,构建了一整套真实可靠的人机交互场景,即通过手持遥操作主手设备在远程环境下操纵工业  由中国电子学会主办的世界机器人大赛(World Robot Contest)由选拔赛(WRCT)、锦标赛(WRCC)、总决赛(WRCF)组成,大赛自2015年起已成功举办了10届,共吸引了全球20余个国家50余万名选手参赛,被广泛赞誉为机器人界的“奥林匹克”,自2019年连续得到了国家自然科学基金委
由中国电子学会主办的世界机器人大赛(World Robot Contest)由选拔赛(WRCT)、锦标赛(WRCC)、总决赛(WRCF)组成,大赛自2015年起已成功举办了10届,共吸引了全球20余个国家50余万名选手参赛,被广泛赞誉为机器人界的“奥林匹克”,自2019年连续得到了国家自然科学基金委 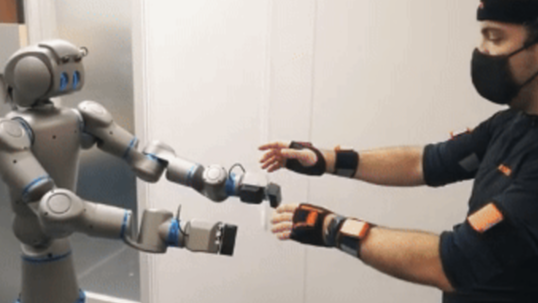 在人工智能与机器人技术深度融合的浪潮中,人形机器人正从实验室走向工业制造、医疗护理、公共服务等真实场景。然而,要让机器人真正“像人类一样工作”,动作的流畅性、精准度与环境适应性仍是技术突破的关键。Xsens动作捕捉系统通过创新的拟人化动作AI训练方案,为机器人赋予更接近人类的运动能力,成为推动行业升
在人工智能与机器人技术深度融合的浪潮中,人形机器人正从实验室走向工业制造、医疗护理、公共服务等真实场景。然而,要让机器人真正“像人类一样工作”,动作的流畅性、精准度与环境适应性仍是技术突破的关键。Xsens动作捕捉系统通过创新的拟人化动作AI训练方案,为机器人赋予更接近人类的运动能力,成为推动行业升  浙公网安备 33010602011771号
浙公网安备 33010602011771号