机器人仿真笔记[1]-快速体验
机器人仿真工具:Gazebo
[https://zhuanlan.zhihu.com/p/32788790]
Gazebo:开源,是ROS的默认仿真器,支持Bullet和ODE引擎,由OSRF(Open Source Robotics Foundation)维护(也是现在ROS的维护者),因此对于ROS的兼容性好。Gazebo中的模型格式是基于XML的SDF(Simulation Description Format),这有点像命令行,学习曲线较陡,但是学会后可以创造出很复杂的模型。
docker环境
- 获取镜像
docker pull gazebo
本文所用的image id为93a1f3c52903
- 挂载
docker run -it -p 8070:8070 -v /Users/workspace/Downloads/hello:/tmp --privileged=true gazebo:latest /bin/bash
机器人仿真工具:Webots
Webots is an open source(开源) and multi-platform desktop application used to simulate robots. It provides a complete development environment to model, program and simulate robots.
It has been designed for a professional use, and it is widely used in industry, education and research. Cyberbotics Ltd. maintains Webots as its main product continuously since 1998.
Webots是一个众所周知的机器人模拟器,在过去的22年中不断开发,记录,测试和使用,并在Linux,macOS和Windows上具有良好的ROS接口。作为100%免费的开源软件,Webots有望被机器人研究界广泛采用。这将转化为更多项目和更多贡献:机器人模型,对象,环境,接口,控制器示例,教程,讲座,错误修复,新功能等。
Webots内核基于开源动力学引擎ODE和开源图形引擎OpenGL,并且支持多种编程语言(C/C++,Python,Java,MATLAB)。
Webot R2022a在mac平台支持macOS 10.15和10.14.
[http://cyberbotics.com/doc/guide/system-requirements]
快速体验
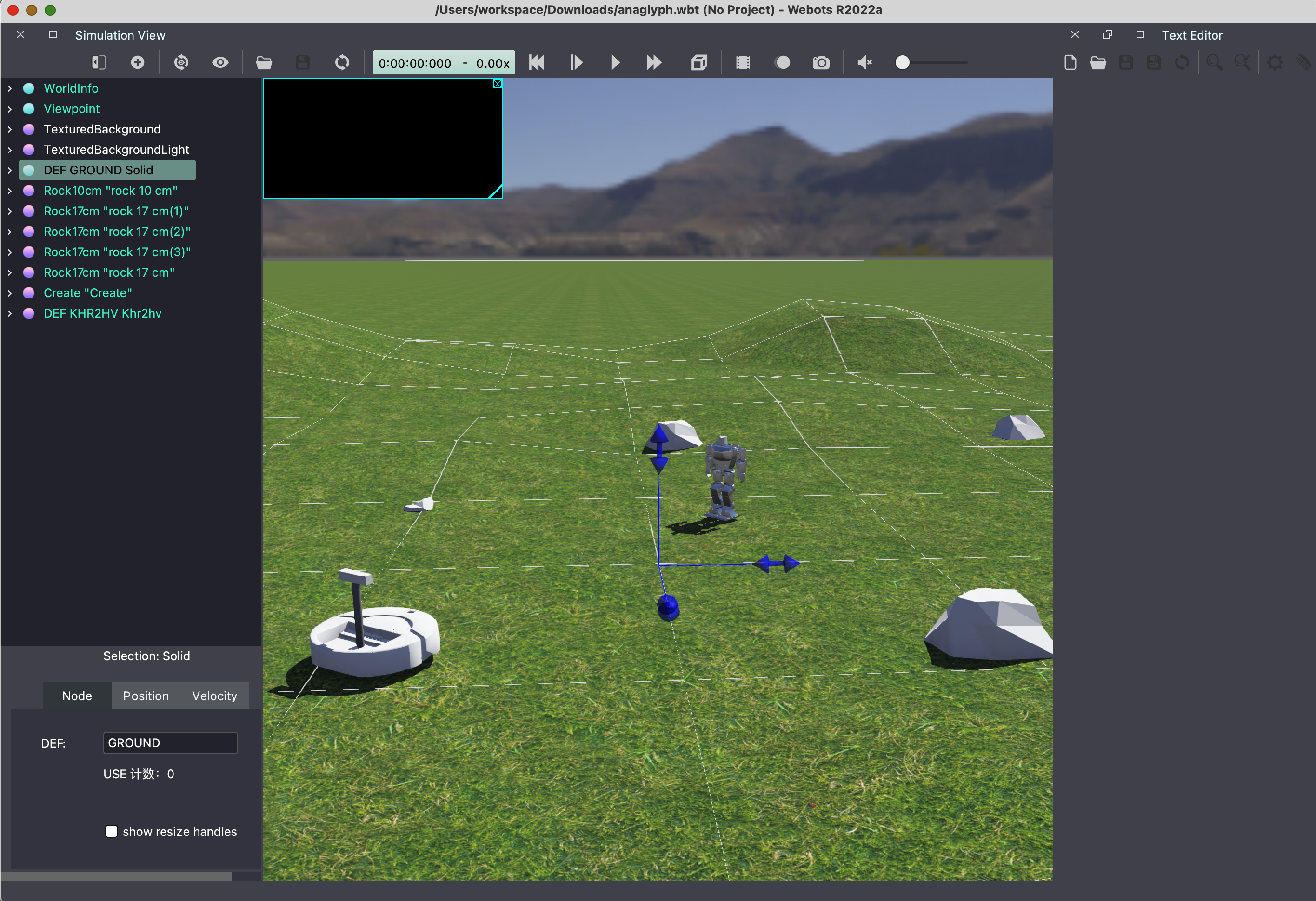
使用的示例:anaglyph.wbt(https://github.com/cyberbotics/webots/tree/released/projects/samples/demos/worlds/anaglyph.wbt)
加载World选择这个文件,然后会下载相关资源文件(需要能够访问github.com).
This example demonstrates the merge of two Camera images into one, in order to create an anaglyph image. A stereoscopic camera is mounted on a iRobot Create robot. At each step, both Camera images are merged into a Display device, one is filtered in red, and the other one is filtered in cyan. This produces an anaglyph 3D image that can be seen with low cost red/cyan 3D glassed.
加载后记得电机播放按钮开始仿真。
现象:机器人在草坪上移动。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号