
相机的内参矩阵、外参矩阵、相机矩阵
参考资料:
- 机器视觉-相机矩阵(一) - 知乎 (zhihu.com)
- 自动驾驶中常见坐标系极其转换 - 知乎 (zhihu.com) (推荐)
- 机器视觉-相机矩阵(二) - 知乎 (zhihu.com)
- 深入解读相机矩阵_相机内参矩阵-CSDN博客
- 一文带你搞懂相机内参外参(Intrinsics & Extrinsics) - 知乎 (zhihu.com)(相机内参讲解的很不错)
- 【相机与图像】1. 相机模型的介绍:内参、外参、畸变参数_相机内参-CSDN博客 (推荐)
- Step1:模型 16个相机参数(内参、外参、畸变参数)-CSDN博客
- [作业题]图像内参在图像裁剪和缩放后的内参变化_当使用的图片的尺寸发生变化时,计算得到的内参与外参如何变化-CSDN博客
- 【相机标定系列】0415 图像缩放之后相机内参变化,调整图像大小如何影响固有相机矩阵?_相机标定 图片经过缩放后-CSDN博客
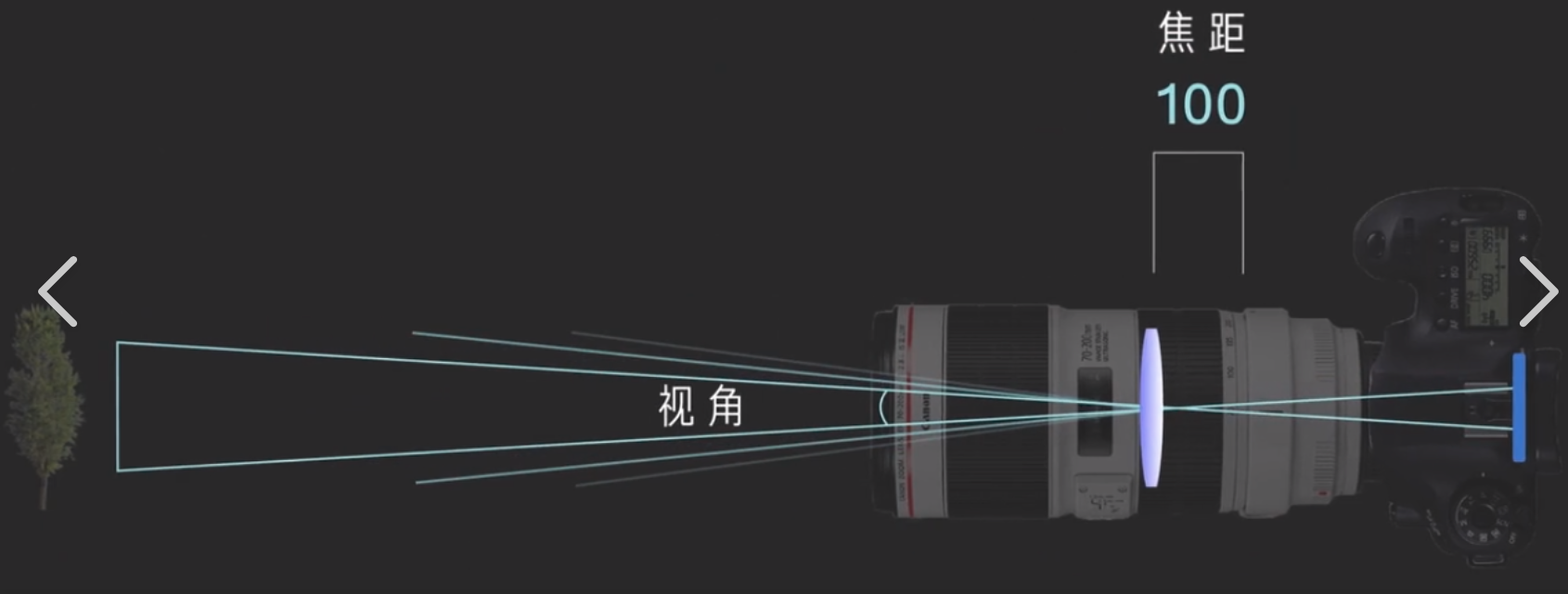
普通相机:
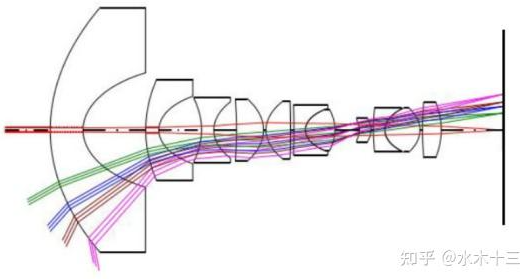
鱼眼相机:
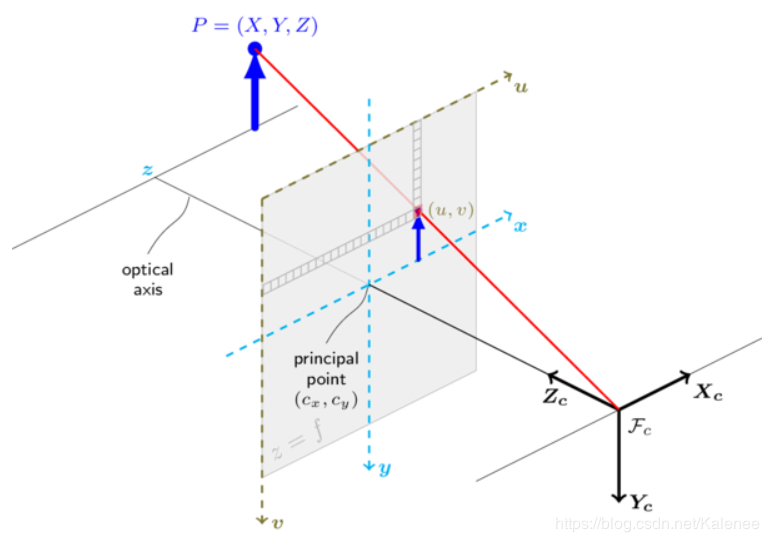
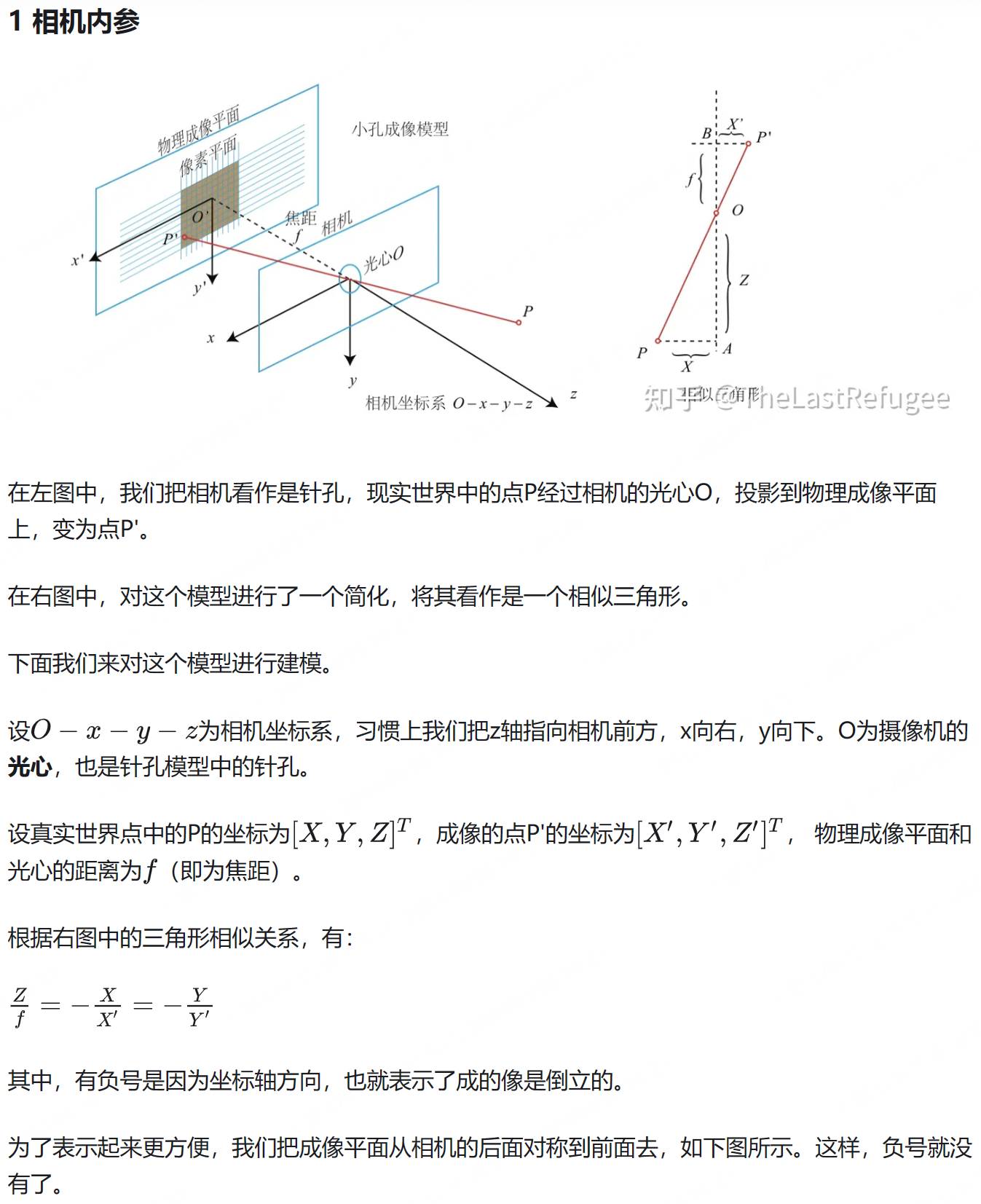
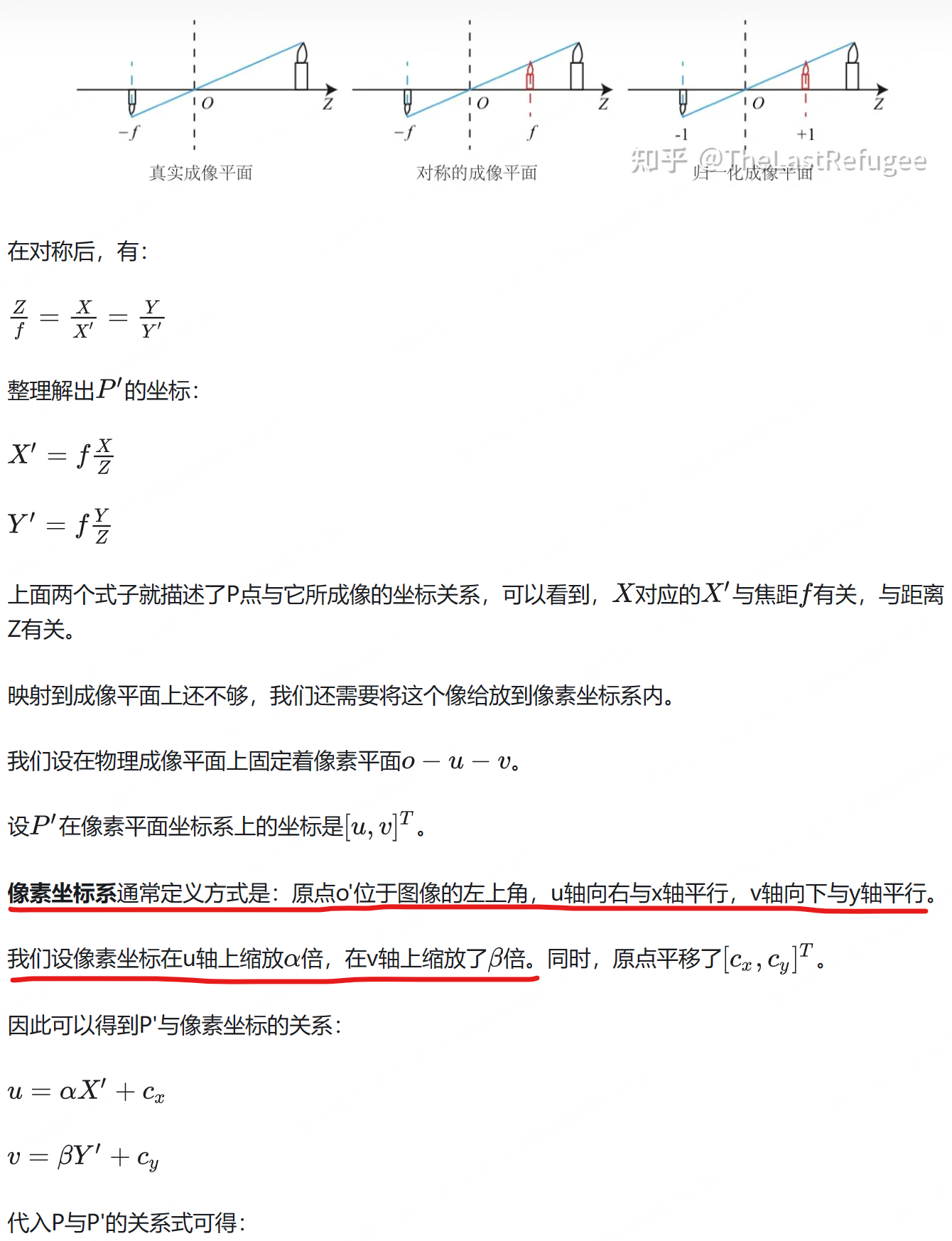
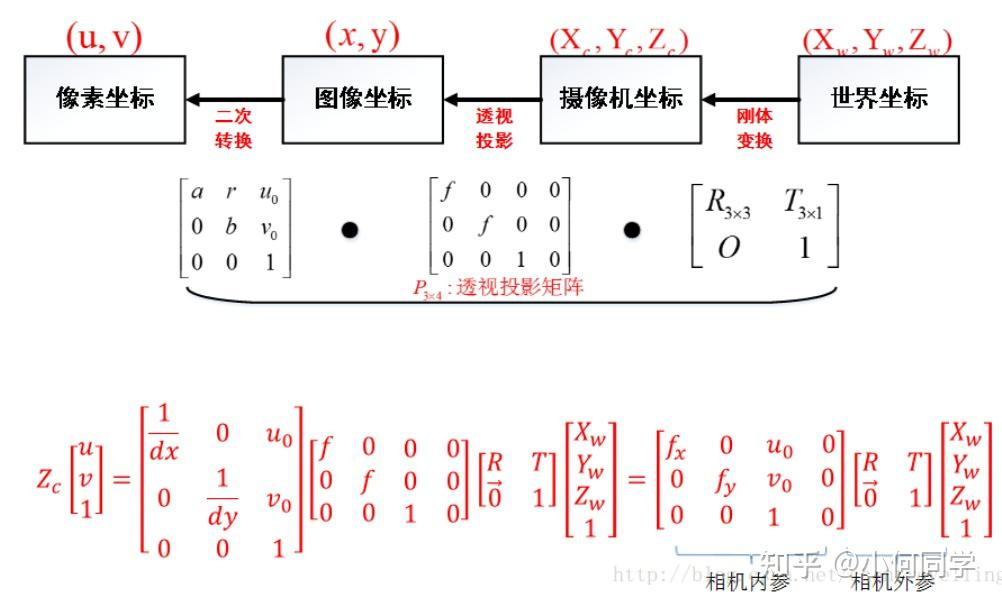
针孔相机成像模型示意图:
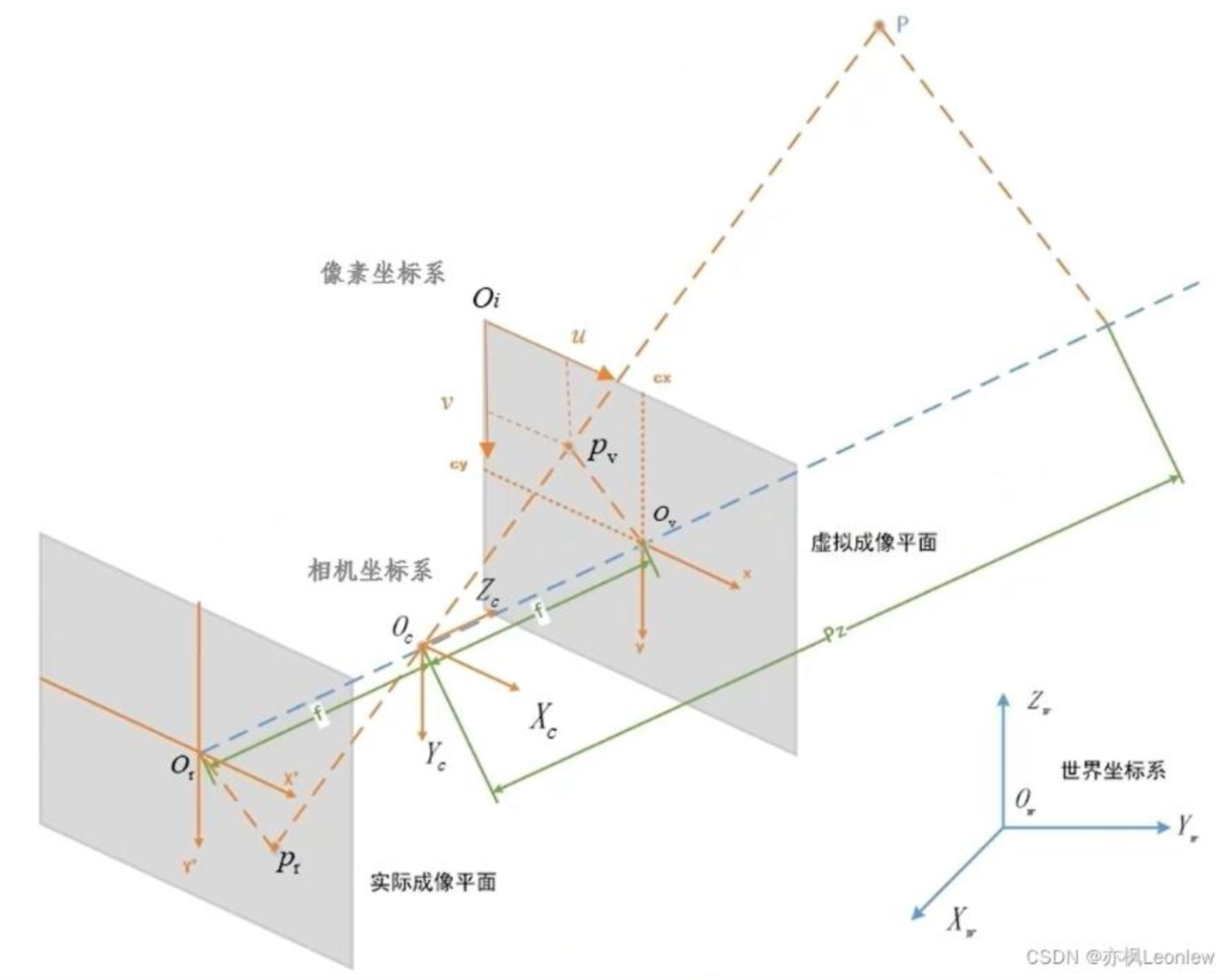
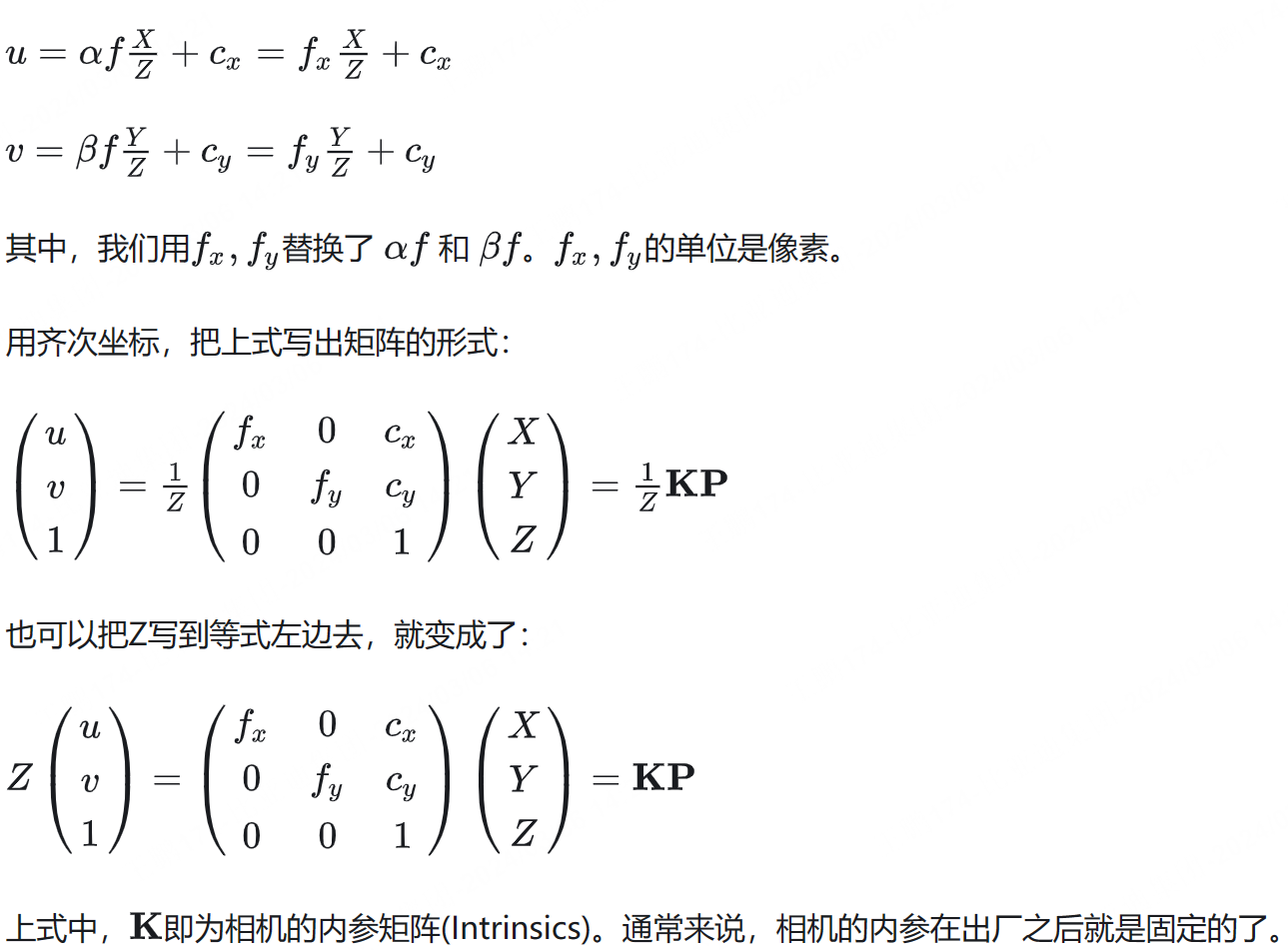
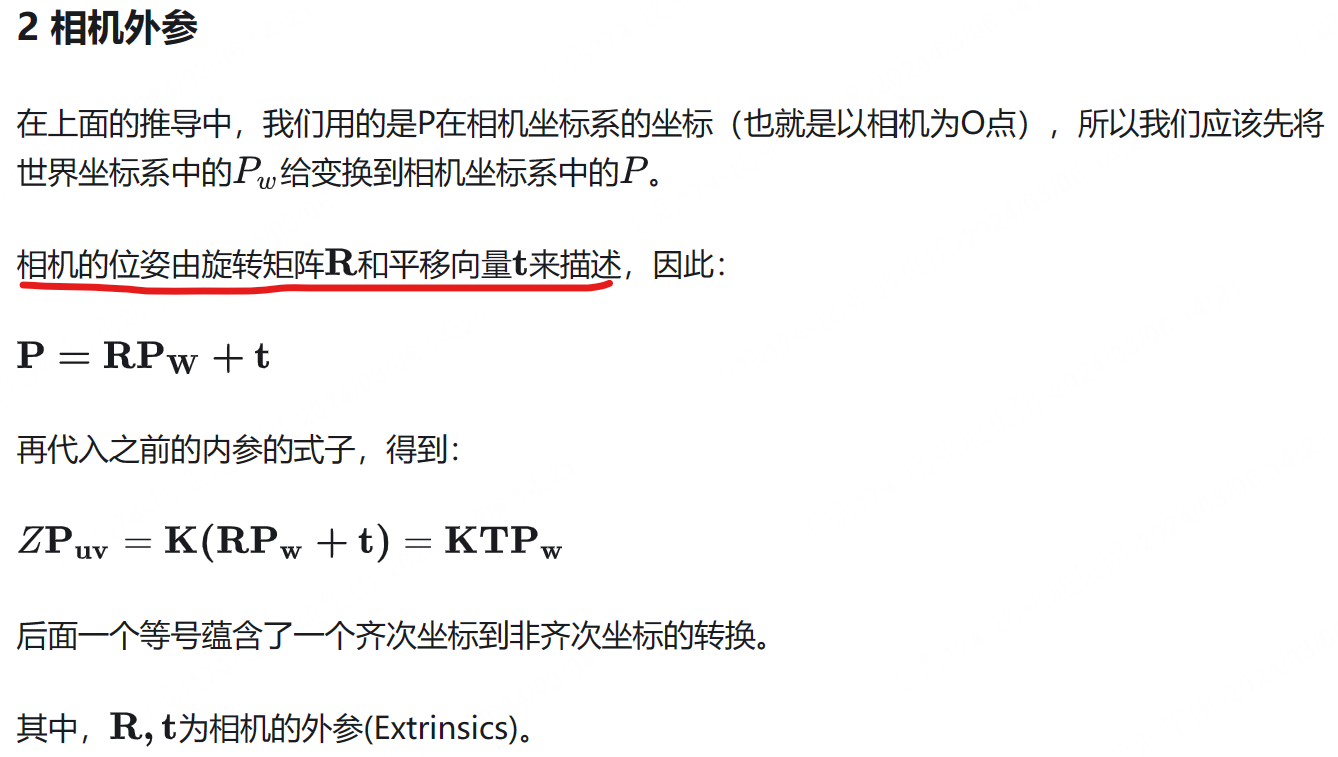
内参矩阵x外参矩阵=相机矩阵
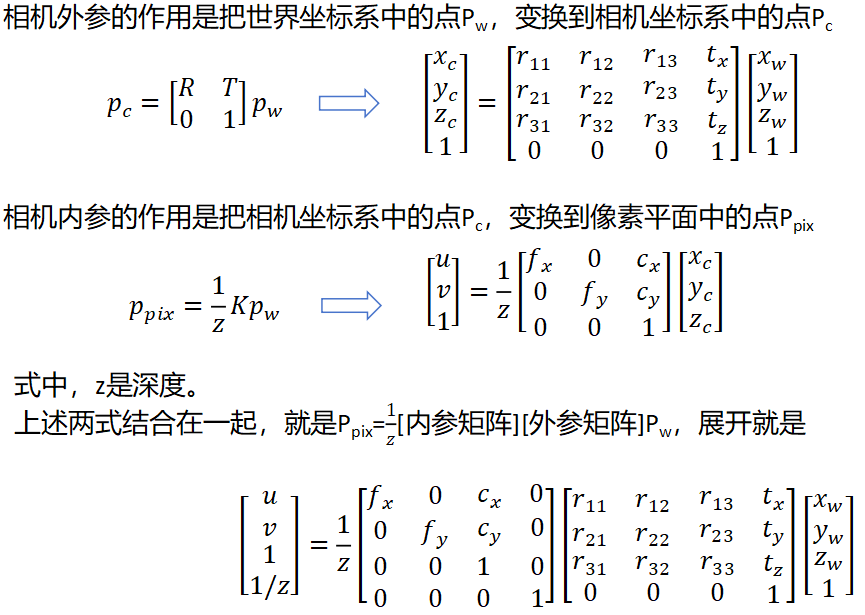
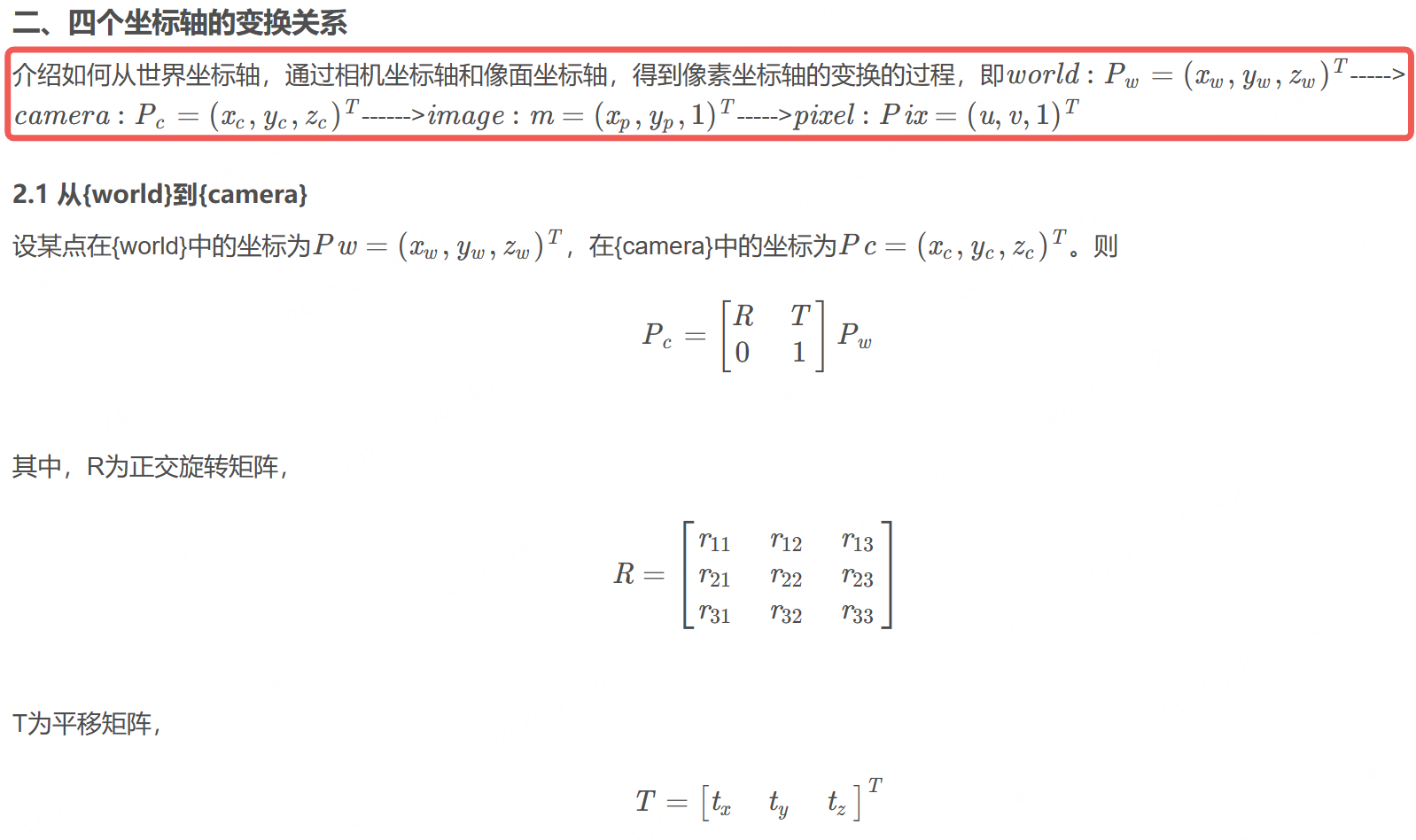
世界坐标系到像素坐标系的变换:
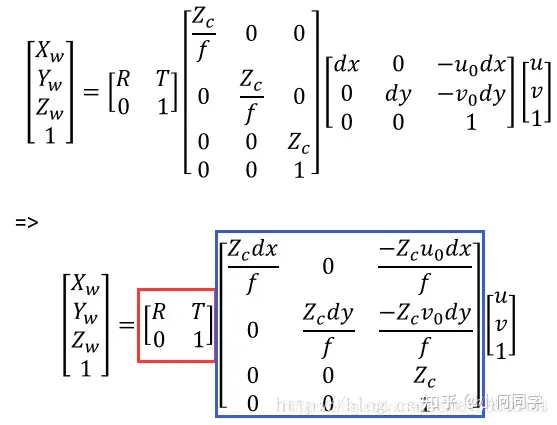
像素坐标系到世界坐标系的变换:

3. 相机标定
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定。(摘自百度百科)
相机标定的目的是求出相机的几何模型参数,也就是求出相机的内、外参数,以及畸变参数。例如普通针孔相机的参数$f_x, f_y, c_x, c_y, R, T$;又例如鱼眼相机的参数$f_x, f_y, c_x, c_y, k_1, k_2, k_3, k_4$。
标定相机后通常是想做两件事:一个是由于每个镜头的畸变程度各不相同,通过相机标定可以校正这种镜头畸变矫正畸变,生成矫正后的图像;另一个是根据获得的图像重构三维场景。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号