摘要:
四元数(Quaternion)是由爱尔兰数学家威廉·卢云·哈密顿在1843年创立出的数学概念。通常记为H,或 H {\displaystyle \mathbb {H} }。 从明确地角度而言,四元数是复数的不可交换延伸。如把四元数的集合考虑成多维实数空间的话,四元数则代表着一个四维空间,相对于复数为 阅读全文
posted @ 2025-07-13 05:26
杨孝乾
阅读(560)
评论(0)
推荐(0)
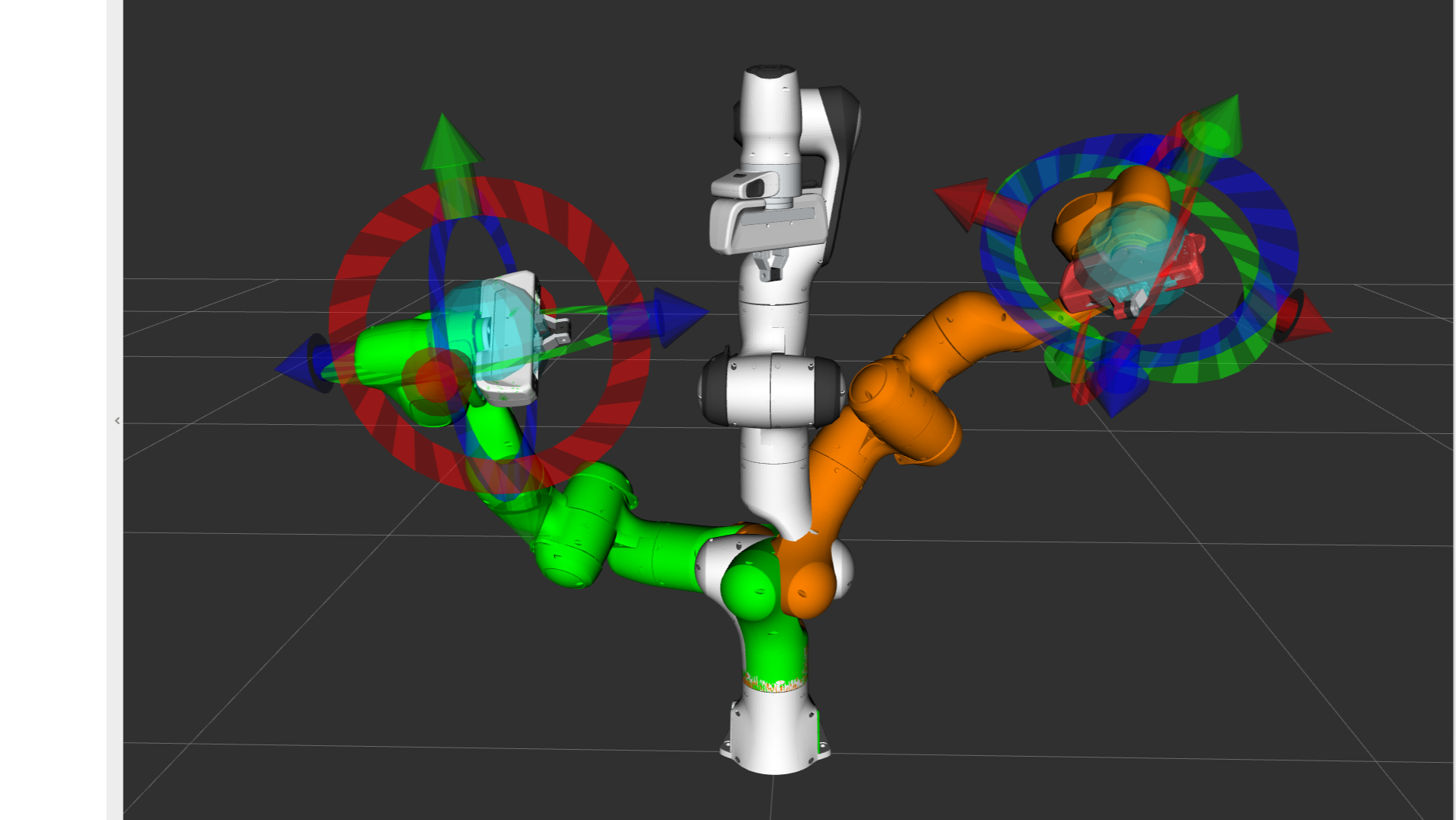 通过初学者教程学习MoveIt的基础,帮助您创建下一个机器人操纵项目。 阅读全文
通过初学者教程学习MoveIt的基础,帮助您创建下一个机器人操纵项目。 阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号