
@
论文资料:https://arxiv.org/pdf/2406.06427
一、高斯分布
1.1 高斯概率密度函数
一维情况下, 高斯概率密度函数表示为:

其中\(\mu\)为均值, \(\sigma^2\)为方差。
多维情况下, 高斯概率密度函数表示为

其中\(\mu\)为均值, 方差为\(\Sigma\) 。
1.2 联合高斯概率密度函数




1.3 高斯随机变量的线性变换

二、滤波器基本原理
符号说明:
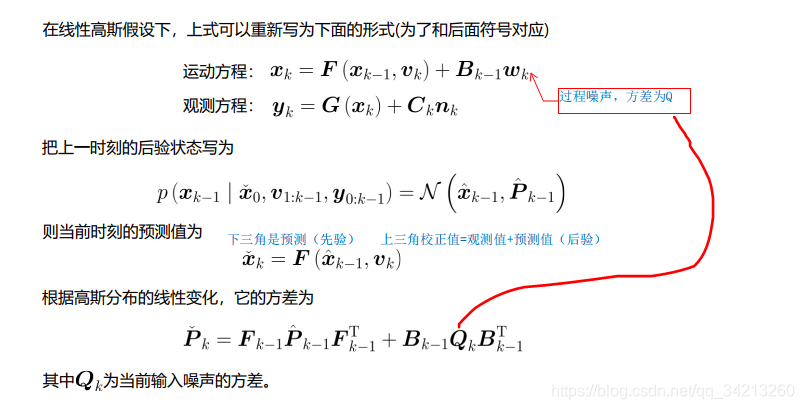
\(\check{\boldsymbol{x}}\)是预测(先验)\(\hat{\boldsymbol{x}}\)校正值=观测值+预测值(后验): \(\check{\boldsymbol{x}}_{k}=\boldsymbol{F}\left(\hat{\boldsymbol{x}}_{k-1}, \boldsymbol{v}_{k}\right)\)
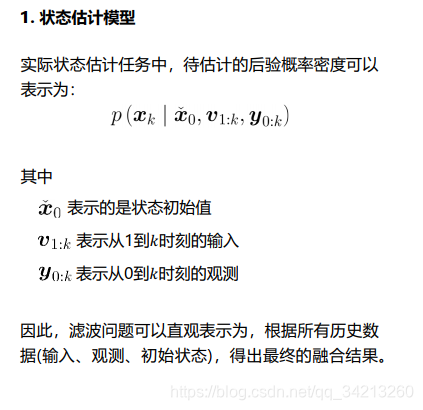
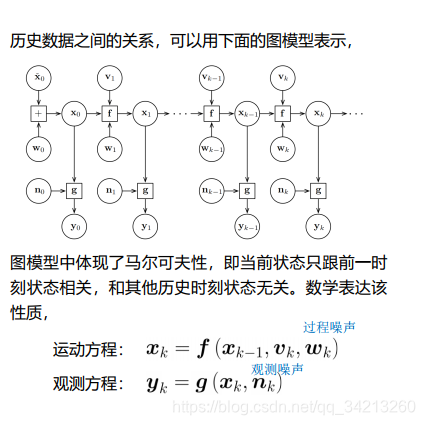
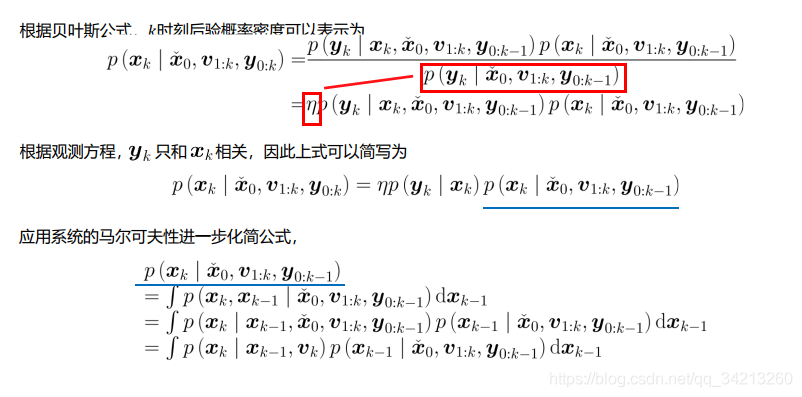
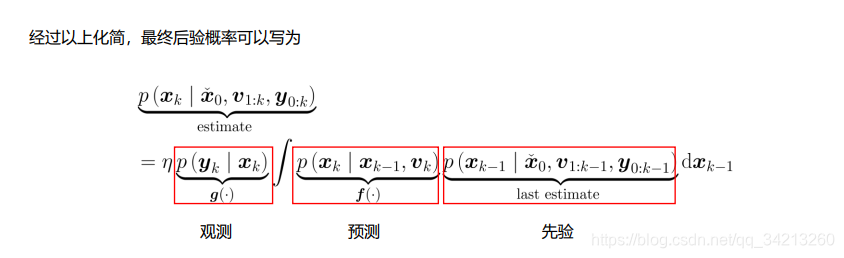
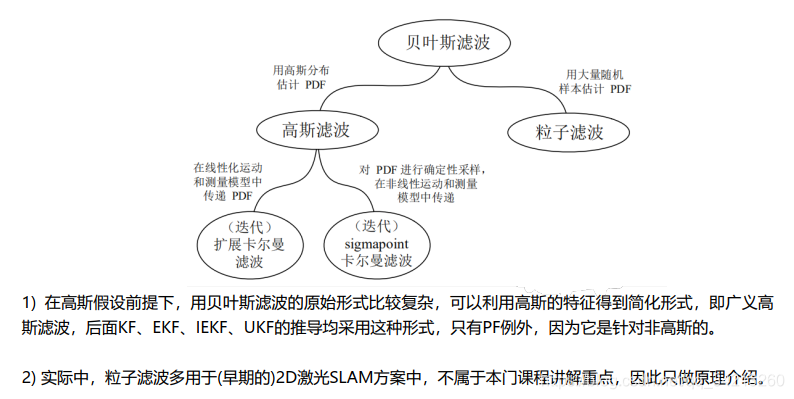
2.1 贝叶斯滤波
 虚线表示可选,一般是没有的
虚线表示可选,一般是没有的
三、卡尔曼滤波
3.1 普通卡尔曼滤波器 (KF)
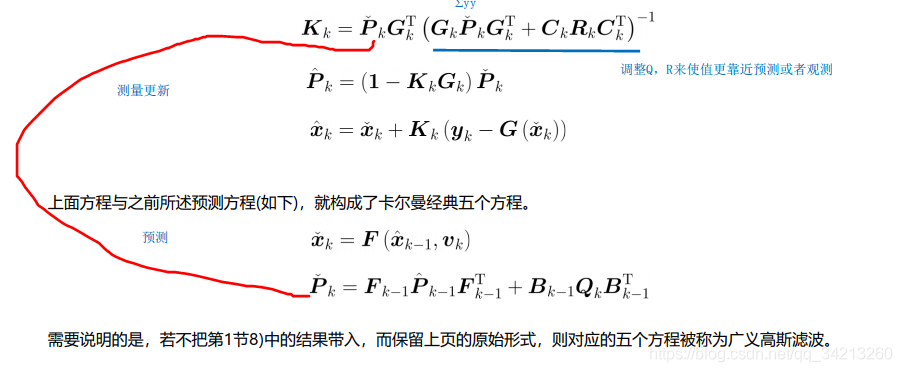
 1.3 的推导得出的线性变换后的均值、 方差及交叉项带入上面的式子, 可以得到:
1.3 的推导得出的线性变换后的均值、 方差及交叉项带入上面的式子, 可以得到:
3.2 扩展卡尔曼滤波(EKF)
因为卡尔曼滤波的推导是建立在线性高斯假设的基础上的,因此当运动方程或观测方程为非线性的时候, 无法再利用之前所述的线性变化关系进行推导, 常用的解决方法是进行线性化, 把非线性方程一阶泰勒展开成线性。 即
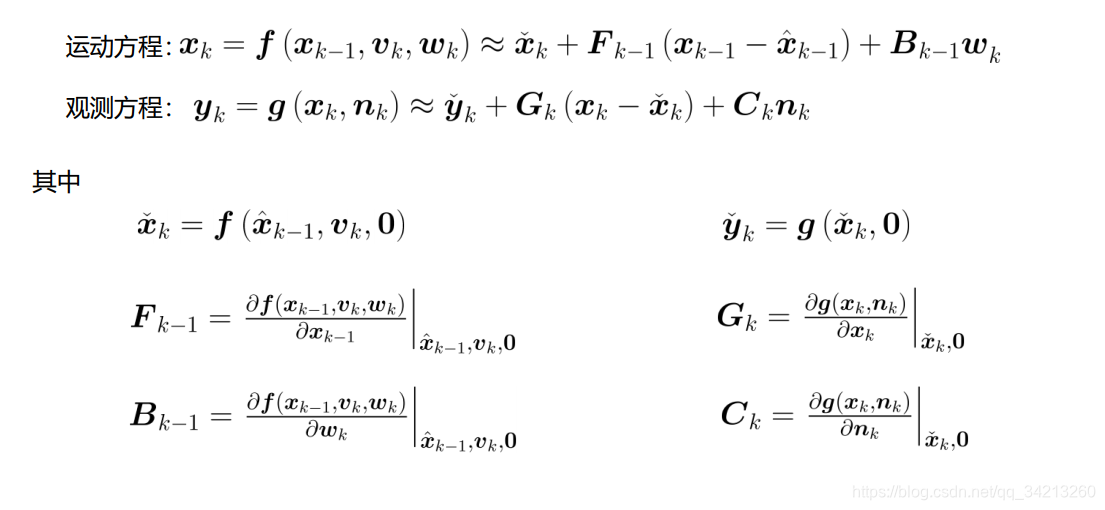
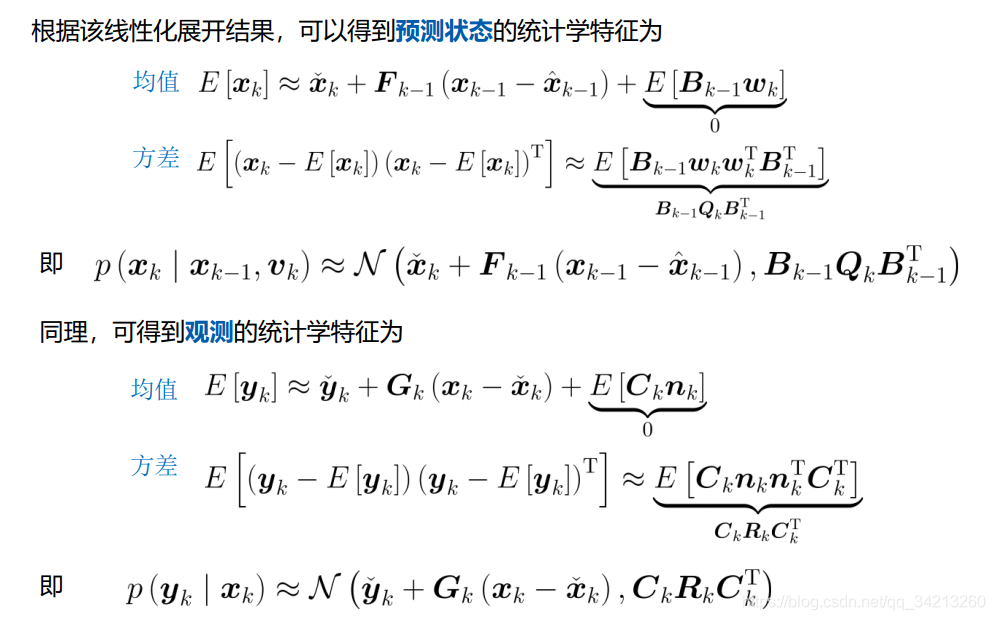
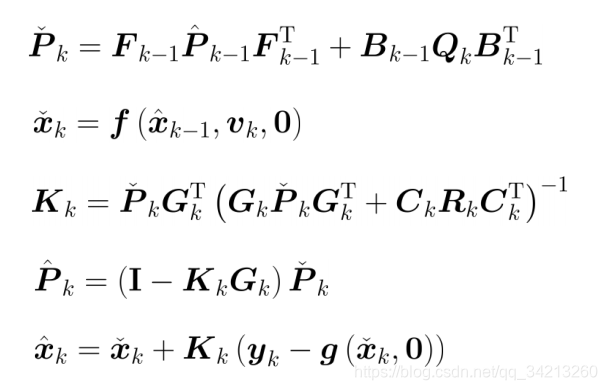
后面即可按照线性高斯下推导卡尔曼滤波的步骤进行推导, 最终得到经典五个公式
3.3 迭代扩展卡尔曼滤波(IEKF)
由于非线性模型中做了线性化近似, 当非线性程度越强时, 误差就会较大, 但是由于线性化的工作点离真值越近,线性化的误差就越小, 因此解决该问题的一个方法是, 通过迭代逐渐找到准确的线性化点, 从而提高精度。
在EKF的推导中, 其他保持不变, 仅改变观测的线性化工作点, 则有
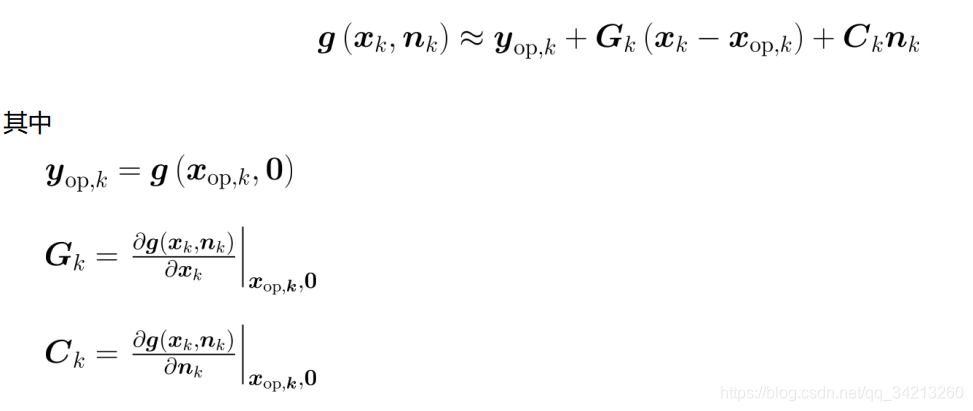
按照与之前同样的方式进行推导, 可得到滤波的校正过程为
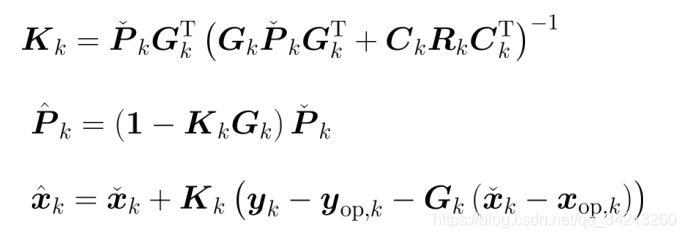
可见唯一的区别是后验均值\(\hat{x}_k\)更新的公式与之前有所不同。滤波过程中, 反复执行上面3个公式中的公式3, 以上次的后验均值作为本次的线性化工作点, 即可达到减小非线性误差的目的。
- 其中
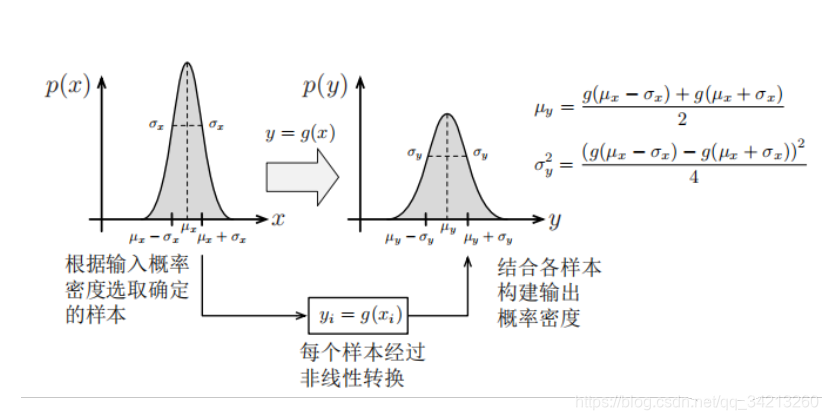
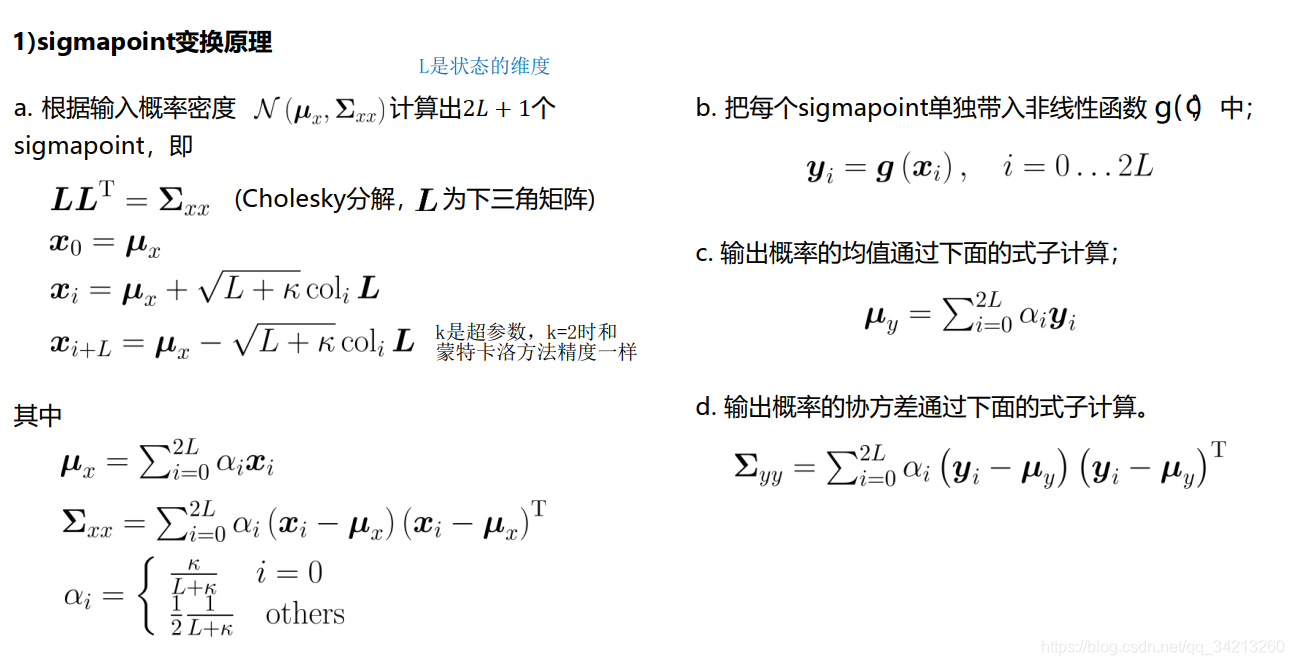
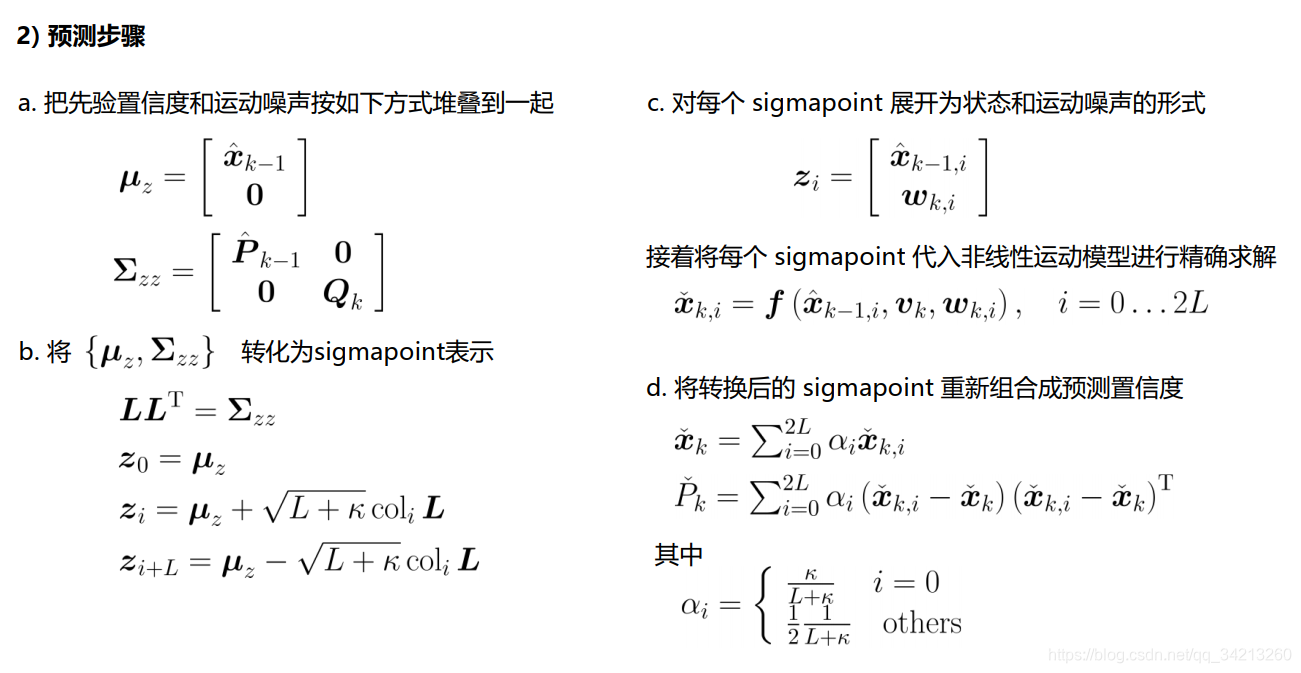
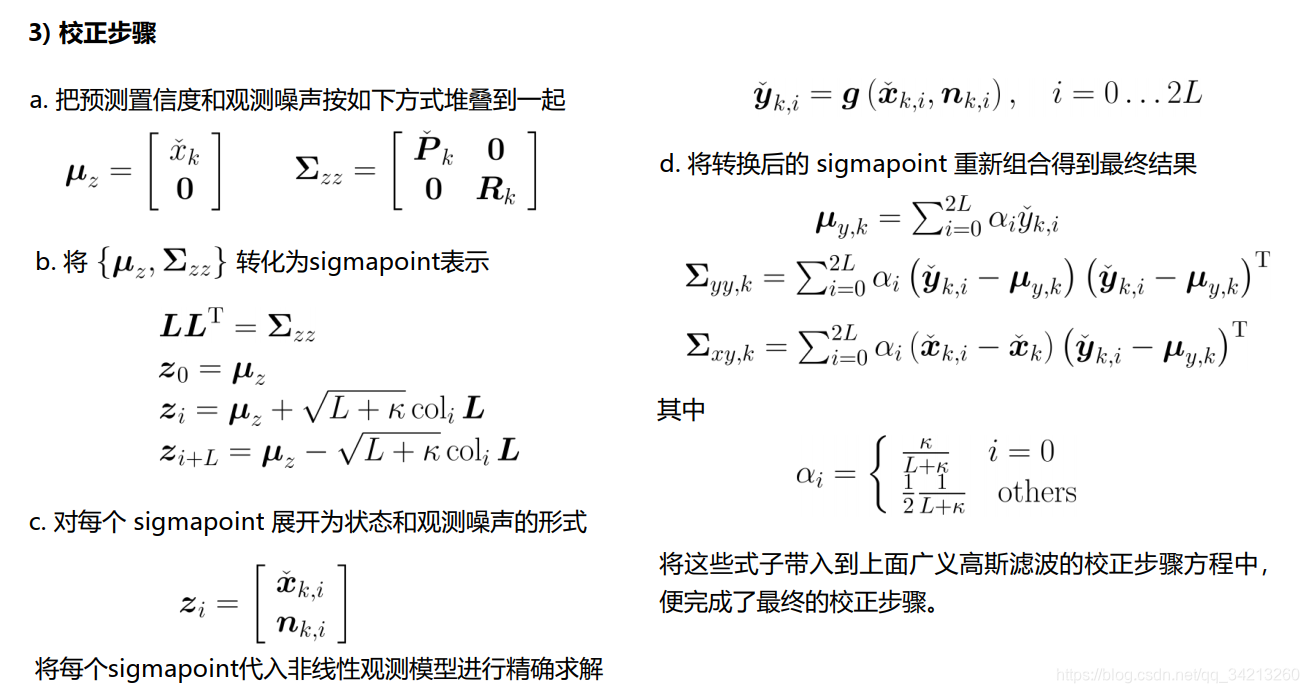
3.4 无迹/无损卡尔曼滤波(UKF)
该方法的核心思想是, 通过采样一部分sigmapoint点, 传入非线性函数, 通过计算这些点的分布, 来近似概率密度函数。
3.5 误差状态卡尔曼(ESKF)
状态量

观测量:
步骤 1:使用带误差的微分方程求出如下公式
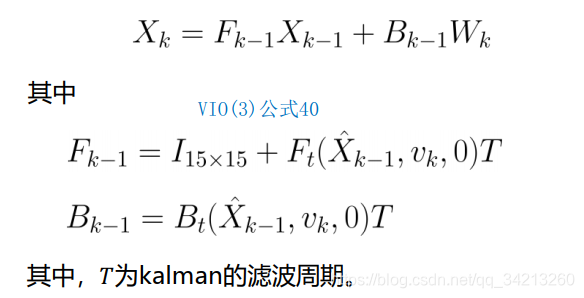
步骤2:状态方程为
步骤3:观察方程形式不变,变的只是含义·
步骤4:卡尔曼5公式不变。与普通卡尔曼的区别仅仅是状态量和观测量从系统状态,变成了状态误差,从而导致F、G矩阵的改变。
如果对您有帮助,就打赏一下吧O(∩_∩)O
微信


 浙公网安备 33010602011771号
浙公网安备 33010602011771号