




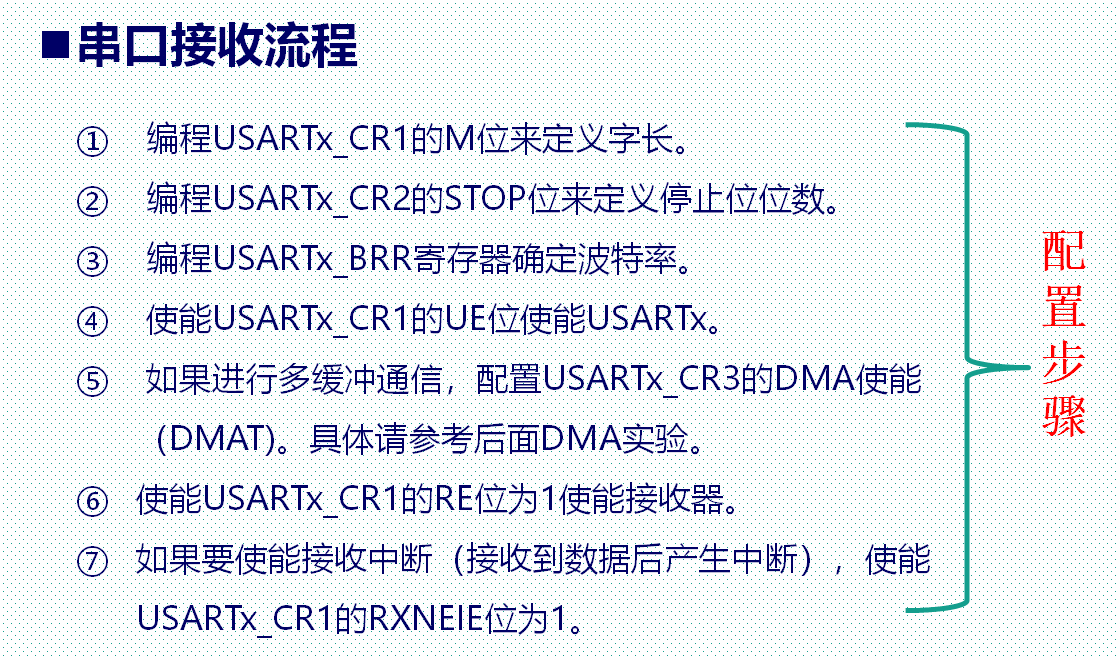

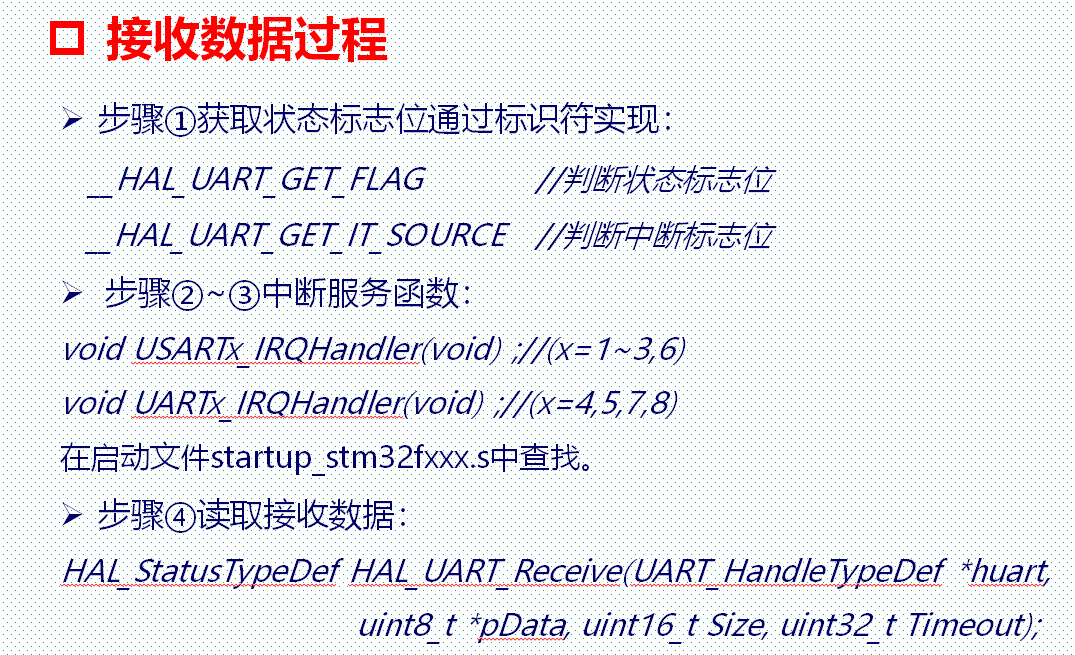
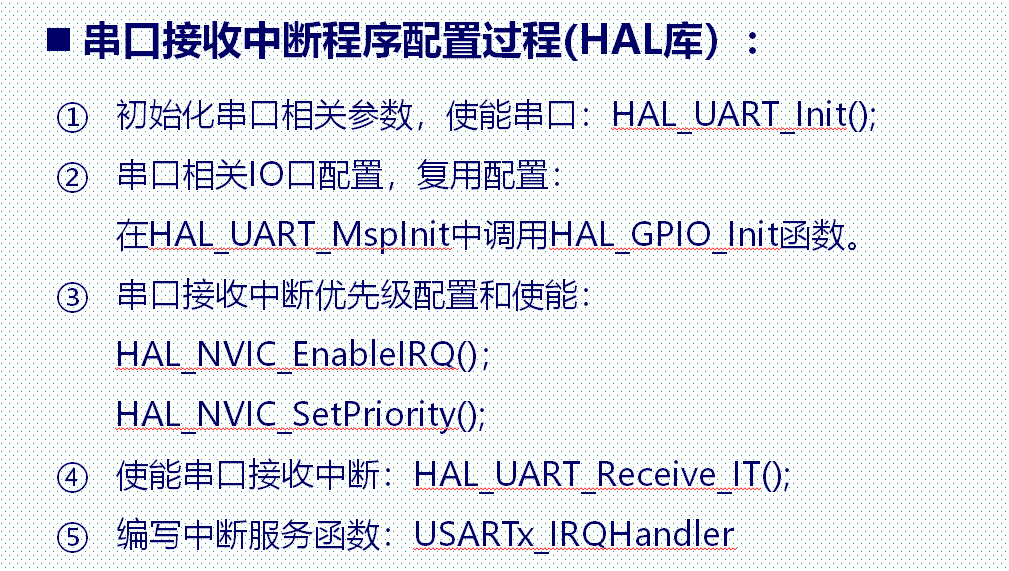
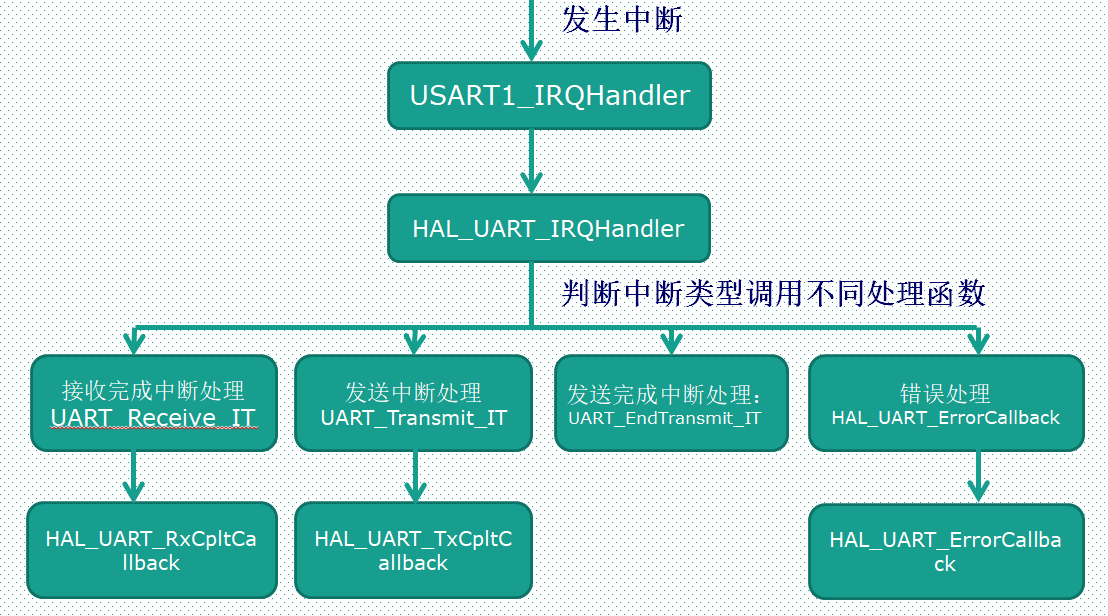
#include "sys.h" #include "delay.h" #include "usart.h" u8 rdata[1]; UART_HandleTypeDef usart1_handler; //UART¾ä±ú void uart1_init() { usart1_handler.Instance=USART1; //USART1 usart1_handler.Init.BaudRate=115200; //²¨ÌØÂÊ usart1_handler.Init.WordLength=UART_WORDLENGTH_8B; //×Ö³¤Îª8λÊý¾Ý¸ñʽ usart1_handler.Init.StopBits=UART_STOPBITS_1; //Ò»¸öֹͣλ usart1_handler.Init.Parity=UART_PARITY_NONE; //ÎÞÆæżУÑéλ usart1_handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //ÎÞÓ²¼þÁ÷¿Ø usart1_handler.Init.Mode=UART_MODE_TX_RX; //ÊÕ·¢Ä£Ê½ HAL_UART_Init(&usart1_handler); //HAL_UART_Init()»áʹÄÜUART1 } void HAL_UART_MspInit(UART_HandleTypeDef *huart) { GPIO_InitTypeDef GPIO_Initure; if(huart->Instance==USART1)//Èç¹ûÊÇ´®¿Ú1£¬½øÐд®¿Ú1 MSP³õʼ»¯ { __HAL_RCC_GPIOA_CLK_ENABLE(); //ʹÄÜGPIOAʱÖÓ __HAL_RCC_USART1_CLK_ENABLE(); //ʹÄÜUSART1ʱÖÓ GPIO_Initure.Pin=GPIO_PIN_9; //PA9 GPIO_Initure.Mode=GPIO_MODE_AF_PP; //¸´ÓÃÍÆÍìÊä³ö GPIO_Initure.Pull=GPIO_PULLUP; //ÉÏÀ GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //¸ßËÙ GPIO_Initure.Alternate=GPIO_AF7_USART1; //¸´ÓÃΪUSART1 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //³õʼ»¯PA9 GPIO_Initure.Pin=GPIO_PIN_10; //PA10 HAL_GPIO_Init(GPIOA,&GPIO_Initure); //³õʼ»¯PA10 HAL_NVIC_EnableIRQ(USART1_IRQn); //ʹÄÜUSART1ÖжÏͨµÀ HAL_NVIC_SetPriority(USART1_IRQn,3,3); //ÇÀÕ¼ÓÅÏȼ¶3£¬×ÓÓÅÏȼ¶3 } } void USART1_IRQHandler(void) { HAL_UART_IRQHandler(&usart1_handler); while (HAL_UART_GetState(&usart1_handler) != HAL_UART_STATE_READY);//ÅжÏUARTÊÇ·ñ³õʼ»¯ while(HAL_UART_Receive_IT(&usart1_handler, (u8 *)rdata, 1) != HAL_OK); //ÖØдò¿ªÖÐ¶Ï } void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { u8 rec; if(huart->Instance==USART1)//Èç¹ûÊÇ´®¿Ú1 { rec=*(--(huart->pRxBuffPtr));//°ÑÖ¸Õëµ¹ÍË»ØÔÀ´µÄ×Ö·ûλÖà HAL_UART_Transmit(&usart1_handler,&rec,1,1000); } } int main(void) { HAL_Init(); //³õʼ»¯HAL¿â Stm32_Clock_Init(360,25,2,8); //ÉèÖÃʱÖÓ,180Mhz delay_init(180); uart1_init();//³õʼ»¯´®¿Ú²ÎÊý HAL_UART_Receive_IT(&usart1_handler, (u8 *)rdata, 1);//¸Ãº¯Êý»á¿ªÆô½ÓÊÕÖжϣº±ê־λUART_IT_RXNE£¬²¢ÇÒÉèÖýÓÊÕ»º³åÒÔ¼°½ÓÊÕ»º³å½ÓÊÕ×î´óÊý¾ÝÁ¿ while(1) { } }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号