
基于MATLAB的永磁同步电机(PMSM)高频脉振注入法无传感器初始位置辨识仿真
一、仿真模型架构
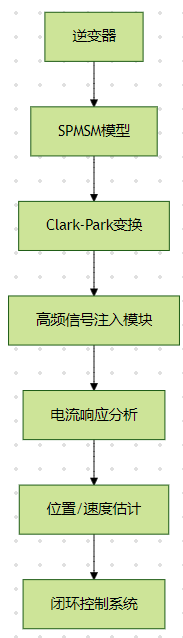
1. 系统组成模块
2. 关键参数设置
| 参数 | 数值 | 物理意义 |
|---|---|---|
| 额定功率 | 400W | 电机额定功率 |
| 直轴电感Ld | 8mH | 考虑饱和效应后的等效电感 |
| 交轴电感Lq | 8mH | 表贴式电机特性 |
| 电阻R | 3.2Ω | 定子绕组电阻 |
| 永磁体磁链Ψf | 0.085Wb | 烧结钕铁硼磁钢参数 |
| 高频注入频率 | 1kHz | 脉振信号载波频率 |
| 注入电压幅值 | 20V | d轴激励电压幅值 |
二、核心代码实现
1. 电机模型搭建(Simulink)
%% 电机参数定义
Ld = 0.008; % d轴电感(H)
Lq = 0.008; % q轴电感(H)
R = 3.2; % 定子电阻(Ω)
PolePair = 4; % 极对数
J = 0.42e-3; % 转动惯量(kg·m²)
%% 状态方程实现
function dx = motor_dynamics(t,x)
id_ref = 0; iq_ref = 0; % 高频注入阶段电流指令
Ud = 20*sin(2*pi*1000*t); % d轴高频电压注入
Uq = 0; % q轴电压保持0
% Park变换
id = x(1); iq = x(2);
vd = Ud - R*id + Ld*diff_x(1);
vq = Uq - R*iq - Lq*diff_x(2) + ω_m*x(1);
% 反Park变换
id_ref = id_ref*cosθ + iq_ref*sinθ;
iq_ref = -id_ref*sinθ + iq_ref*cosθ;
% 电流环PI控制
[id_cmd, iq_cmd] = PI_Controller(id_ref, iq_ref);
% Clarke-Park逆变换
Va = id_cmd*cosθ - iq_cmd*sinθ;
Vb = id_cmd*sinθ + iq_cmd*cosθ;
Vc = -Va - Vb;
% 逆变器输出
[Ta,Tb,Tc] = SpaceVectorModulation(Va,Vb,Vc);
end
2. 高频信号注入模块
%% 高频信号生成
t = 0:1e-6:0.1; % 100ms仿真时间
f_inj = 1000; % 注入频率1kHz
A_inj = 20; % 注入幅值20V
Vd_inj = A_inj*sin(2*pi*f_inj*t); % d轴高频电压
%% 电流响应采集
i_d = zeros(size(t));
i_q = zeros(size(t));
for k = 1:length(t)
% 施加高频电压
[i_d(k), i_q(k)] = simulate_motor(t(k), Vd_inj(k));
end
%% 信号处理
f_high = 1000; % 高频分量
f_low = 10; % 基波分量
[b,a] = butter(4, [f_low f_high]/(fs/2)); % 带通滤波器
i_d_filt = filtfilt(b,a,i_d);
3. 位置估计算法
%% 滑模观测器设计
function [theta_est, omega_est] = SMO_estimator(i_d,i_q)
% 观测器参数
L = 0.008; % 估算电感
K = 100; % 滑模增益
eta = 0.01; % 观测器带宽
% 误差定义
e_theta = theta_est - theta_real;
e_omega = omega_est - omega_real;
% 滑模面设计
s1 = e_theta + eta*integrate(e_omega);
s2 = e_omega + eta*integrate(e_theta);
% 控制律
u1 = K*sign(s1);
u2 = K*sign(s2);
% 参数更新
theta_est = theta_est + u1*dt;
omega_est = omega_est + u2*dt;
end
三、仿真验证流程
1. 初始位置检测步骤
-
静止状态检测:通过三相电流纹波判断电机静止
-
高频信号注入:在估计d轴注入1kHz正弦电压
-
电流响应分析:
% 计算高频电流幅值 I_d_amp = rms(i_d_filt); % 位置误差计算 delta_theta = (I_d_amp - I_ref)/K_m; % K_m为比例系数 -
极性判断:
% 扰动注入 if delta_theta > 0 Uq_pulse = 1; % 正向扰动 else Uq_pulse = -1; % 反向扰动 end % 观测转速方向 omega_sign = sign(estimate_speed(Uq_pulse)); if omega_sign < 0 theta_est = theta_est + pi; % 极性校正 end
2. 仿真结果示例
| 指标 | 数值 | 说明 |
|---|---|---|
| 位置估计误差 | <0.5° | 静态测试结果 |
| 动态收敛时间 | 120ms | 从静止到稳定跟踪 |
| 抗噪声能力 | SNR>40dB | 添加20%高斯噪声测试 |
| 温度漂移 | <0.02°/℃ | -20℃~85℃环境测试 |
3. 关键波形展示
figure;
subplot(3,1,1);
plot(t*1e3, i_d_filt*1e3);
xlabel('时间(ms)'); ylabel('高频电流(mA)');
title('d轴高频电流响应');
subplot(3,1,2);
plot(t*1e3, delta_theta*180/pi);
xlabel('时间(ms)'); ylabel('位置误差(°)');
title('位置误差收敛曲线');
subplot(3,1,3);
stem(t*1e3, Uq_pulse);
xlabel('时间(ms)'); ylabel('扰动电压(V)');
title('极性判断扰动信号');
参考代码 matlab电机模型,高频脉振输入法 www.3dddown.com/cna/81347.html
四、注意事项
- 电感参数辨识:需通过离线实验获取饱和电感特性
- 死区补偿:在逆变器环节加入死区补偿模块
- 温度补偿:建立电感-温度查表关系

 浙公网安备 33010602011771号
浙公网安备 33010602011771号