
赋能智慧隧道施工:工程车辆多模态数据采集系统
随着智慧工地与无人化施工技术的推进,隧道施工装备的数字化转型已成为行业焦点。近期,在和众多该类客户的沟通过程中,我们观察到了一些被频繁提到的客户需求和场景痛点,针对于此,以隧道运输设备——MSV胶轮车为例,本文为该类客户量身定制了一套高性能多模态数据采集方案。
本文将从客户的实际痛点出发,详细拆解如何在无GPS信号、环境恶劣的隧道场景中,实现高精度、多传感器的数据融合与采集。
一、 客户需求与场景痛点
1、复杂的作业环境与对象
本次搭载对象为MSV胶轮车(用于TBM隧道施工物料运输)。车辆长期运行于狭长、封闭的隧道内部,且需要分别在车辆的“前端”和“后端”搭载两套独立的感知系统,以满足双向行驶的作业需求。

2、多模态传感器融合
为了实现对环境的全面感知,单车集成了复杂的传感器组,包括:
-
视觉传感器: 华阳 GMSL2 3M 相机(前后共4路)
-
激光雷达: 主雷达 + 补盲雷达(前后共6颗)
-
毫米波雷达: ARS410(前后共2颗)
-
定位与姿态: IMU hwt905-CAN(前后共2颗)
-
车辆总线: CAN数据采集
传感器布局:
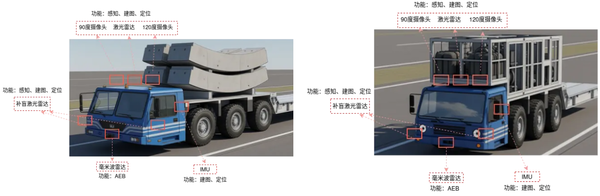
前端布局(左)、后端布局(右)
3、核心痛点:隧道内的时空同步
-
无GPS信号: 隧道内无法获取卫星授时(GPS/GNSS),传统依赖PPS/NMEA的同步方式失效。
-
高带宽并发: 多路激光雷达与高分辨率相机的同时接入,对采集系统的带宽和写入速度提出了巨大挑战。
-
恶劣工况: 隧道施工现场震动大、粉尘多,要求设备具备极高的工业级稳定性。
二、 解决方案概览
针对上述挑战,我们提出了两套差异化的技术路线:“极致性能方案(方案一)”与“高性价比方案(方案二)”,以满足不同研发阶段的需求。
1、方案一:工业级硬同步方案 (BRICKplus + MDILink)
此方案采用了德国b-plus的数据采集生态系统,主打硬件级时间同步和高可靠性。
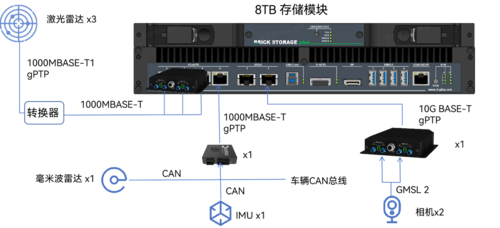
数采系统方案架构图
(1)核心算力与存储: 使用 BRICKplus 工控机,搭载8TB大容量BRICK STORAGE存储模块。设备支持宽温运行,抗震等级高,专为车载环境设计。

加装了BMC-ETH6000和CAN拓展模块的 BRICKplus
(2)无损数据接入:通过 MDILink 转换器,将相机的GMSL2信号无损转换为万兆/千兆以太网数据。SerDes测量数据转换器,适配GMSL、CSI-2、FPDLink等多种接口的传感器,实现无损解耦原始数据和时间戳。接收端软件可将RAW数据转换并存储为AVI、MP4等格式,便于分析和处理。支持时间同步802.1AS
通过 TE CAN combo 模块采集CAN/CAN-FD数据。

MDILink

TE CAN combo 模块
(3)微秒级硬同步(gPTP): 针对隧道无GPS痛点,该方案采用基于XTSS协议的gPTP硬件时间同步。BRICKplus作为主时钟源,与激光雷达、MDILink及CAN模块进行亚微秒级同步,完全不依赖外部卫星信号。
(4)闭环数据回注: 配备 BRICK THUNDER DOCK,支持通过雷电3接口或万兆网口极速回传数据,大幅缩短数据落地时间。

(5)方案总结:
-
优势: 硬件适配性极高,微秒级同步精度,数据安全性好,适应恶劣环境,开发工作量低。
-
不足: 硬件成本相对较高。
2、方案二:灵活型软同步方案 (ECX-3800 + PCIe采集卡)
此方案采用高性能通用工控机配合专业PCIe采集卡的方式,适合对成本敏感且能接受软件同步精度的项目。
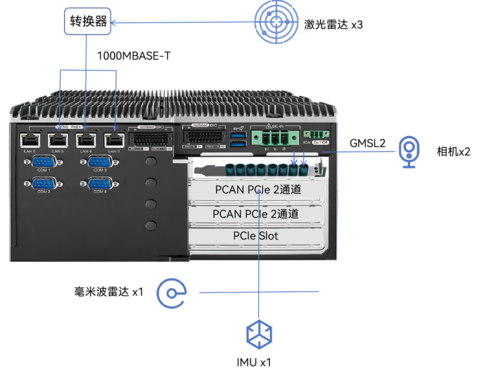
方案二数采系统方案架构图
-
高性能计算平台: 选用 ECX-3800 PEG,搭载Intel i7-13700E处理器与64GB DDR5内存,提供强大的板端处理能力。
-
标准化扩展采集:
-
视频采集: 使用 友思特 Proframe 3.0 采集卡,支持4路GMSL2输入,适配性强。
-
CAN采集: 使用 PCAN-PCI Express FD 4通道卡,通过PCIe接口直接通信。
-
毫秒级软同步: 在缺乏硬件PTP支持的情况下,采用软件层面的时间戳对齐,通过ROS等中间件调整各数据流时间戳,精度在毫秒(ms)级别。
-
便捷存储: 采用标准SATA接口的8TB SSD(如三星870 EVO),支持直接插拔换盘。

友思特 Proframe3.0 视频采集卡(左);PCAN-PCI Express FD - PCI Express转CAN FD接口卡 4通道
(1)方案总结:
-
优势: 配置灵活,硬件成本大幅降低(约为方案一的40%),后期维护及部件更换方便。
-
不足: 仅支持软件同步(ms级),在高动态场景下可能存在数据对齐误差;需投入较多集成开发工作。
三、 软件生态与可视化
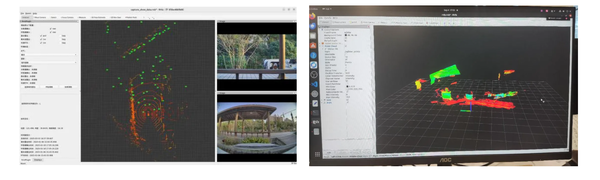
无论选择哪种硬件方案,我们均提供基于 ROS/ROS2 的完整软件支持。
-
实时监控: 定制的数采上位机软件,支持对所有传感器状态的实时监控。
-
数据可视化: 完美适配 Rviz,可实时显示激光雷达点云、相机图像及融合效果,方便工程师现场调试。
-
数据存储: 支持Rosbag录制及通过上位机将RAW数据转换为AVI/MP4等通用格式。
四、 综合建议与选型指南
在最终的方案选择上,我们需要回归到工程场景本身:
(1)关于同步精度:隧道内无GPS信号是最大的限制。如果工程车辆运行速度较慢(如隧道内低速行驶),方案二的毫秒级软同步通常是可以接受的。但如果涉及高速自动驾驶算法验证,建议选择方案一。
(2)关于环境适应性:考虑到隧道施工存在大量粉尘、潮湿和震动,方案一(BRICKplus) 的全封闭、无线缆堆叠设计在可靠性上具有显著优势,且已在德系主机厂有大量成熟应用案例。
(3)实施建议:
-
方案一适合作为标杆项目的首选,确保数据质量万无一失,降低开发风险。
-
方案二适合预算受限或需批量复制的场景,但建议在前期进行充分的PoC(概念验证)测试,重点验证软同步在隧道工况下的稳定性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号