
创建hello_world节点、编译、运行
1、在功能包的src目录下创建源文件
cd hello_world_ws/src/hello_world_pkg/src
touch hello_world.cpp
#include "rclcpp/rclcpp.hpp"
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("hello_world_node"); //创建hello_world节点
RCLCPP_INFO(node->get_logger(), "hello world!!");
rclcpp::spin(node);
rclcpp::shutdown();
return 0
}
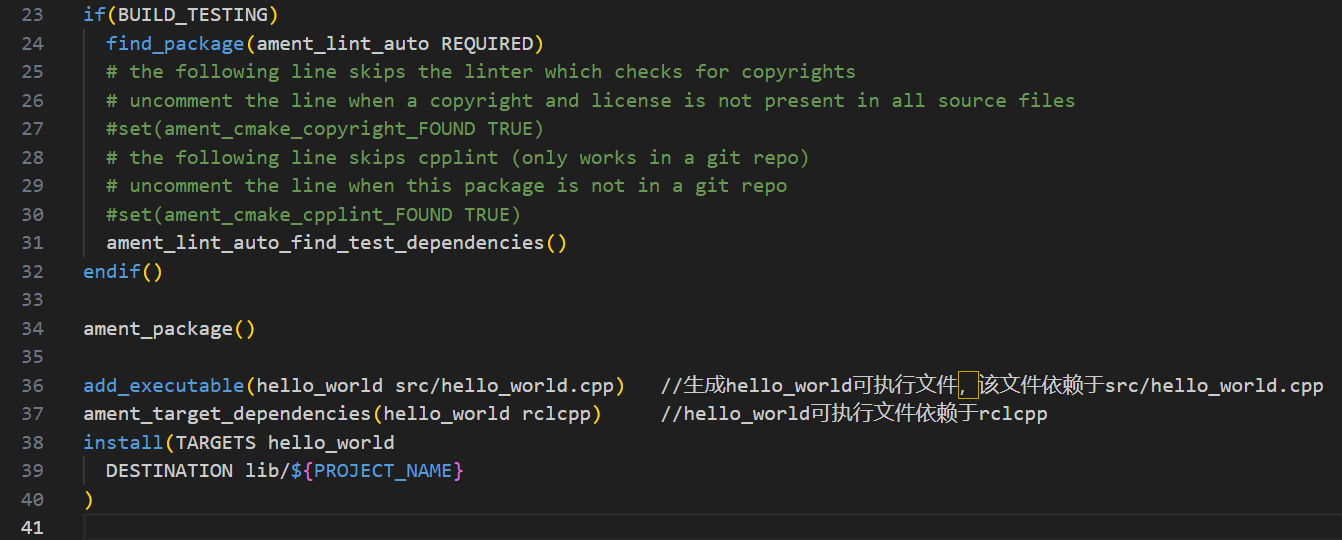
2、修改CMakeLists文件
添加如下语句:
3、编译
进入到工作空间目录,执行colcon build --packages-select hello_world_pkg 其中hello_world_pkg为功能包名,功能包名不要含有大写字母,否则编译的时候会有告警。
编译之后,更新环境变了source install/setup.bash
4、运行
在工作空间目录,执行ros2 run hello_world_pkg hello_world
其中hello_world_pkg为功能包名,hello_world为可执行文件
5、结果


 浙公网安备 33010602011771号
浙公网安备 33010602011771号