
1、ros2的安装
本文安装ros2系统,以ubuntu20.04为例,不同的ubuntu版本安装方法略有不同
1、确定虚拟机中是否设置了支持UTF-8
使用locale命令查看,
如上图所示,本虚拟机已经支持UTF-8,因此无需设置。如果不支持UTF-8格式,则需要配置支持UTF-8,配置命令如下:
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2、添加gpg秘钥
sudo apt install curl gnupg2 lsb-release
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
3、将存储库添加至源列表
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
4、安装ros2包
由于使用的是ubuntu20.04版本虚拟机,因此安装的ros2包为ros-foxy-desktop
在执行下面命令之前必须要先执行apt update
sudo apt install ros-foxy-desktop
5、环境设置
source /opt/ros/foxy/setup.bash
echo " source /opt/ros/foxy/setup.bash" >> ~/.bashrc
综上5步ros2系统已经安装完成。
测试:(一共需要启动两个终端)
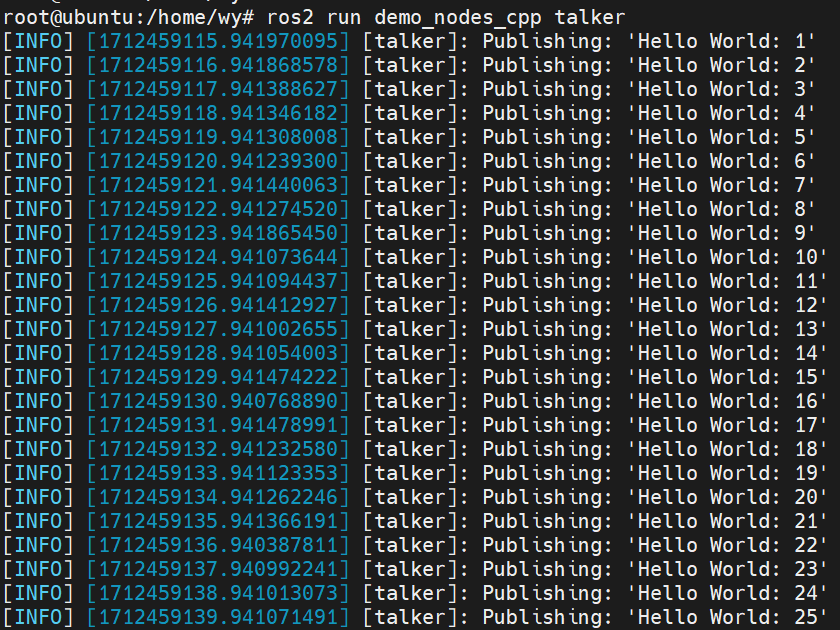
启动第一个终端,通过以下命令启动一个数据的发布者节点:
ros2 run demo_nodes_cpp talker
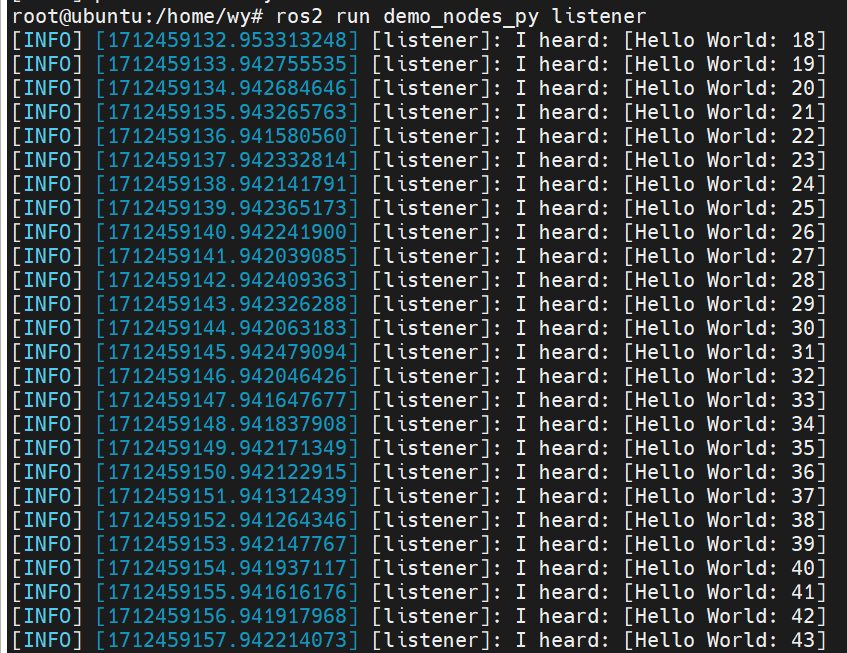
启动第二个终端,通过以下命令启动一个数据的订阅者节点:
ros2 run demo_nodes_py listener

 浙公网安备 33010602011771号
浙公网安备 33010602011771号