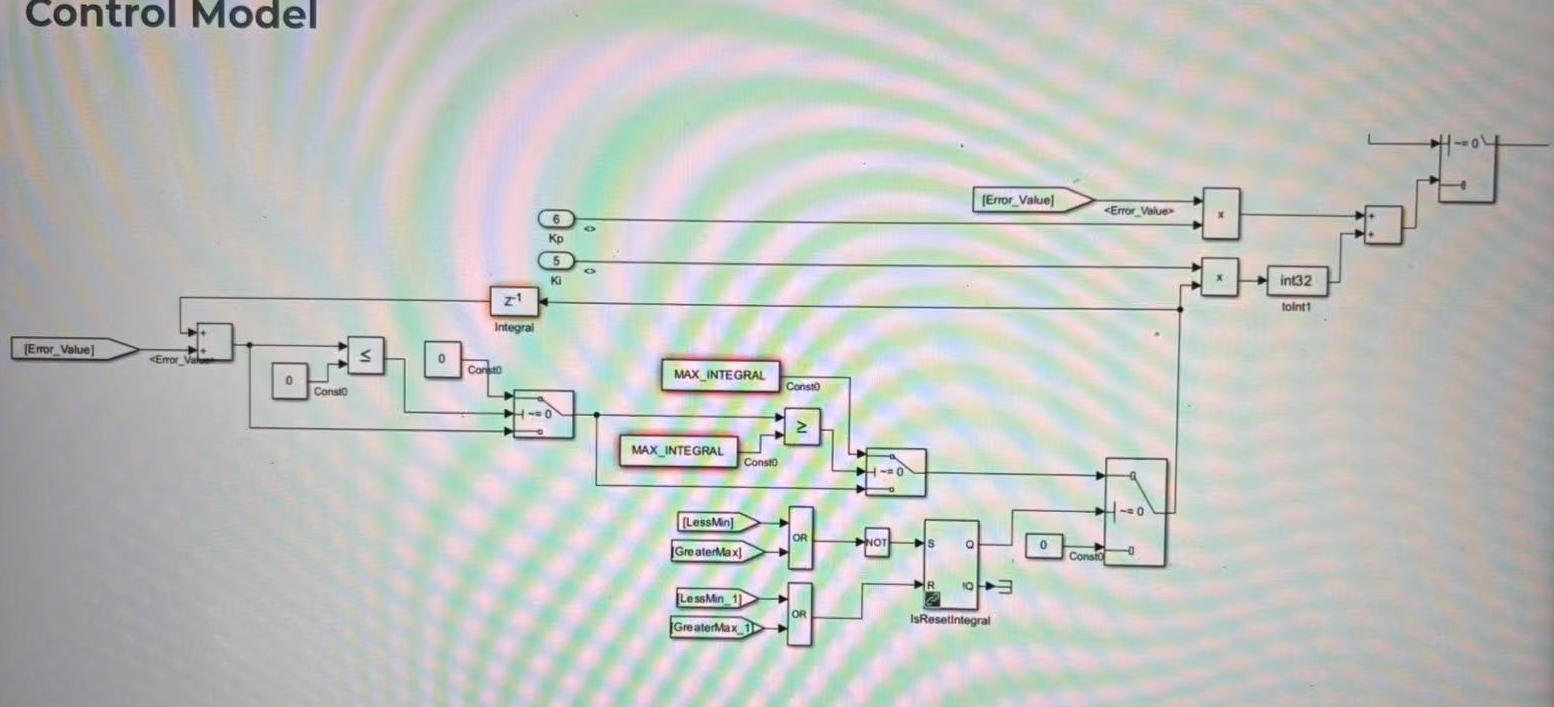
浅析基于matlab模型生成的PID控制
本文章反对重复造轮子,但是我们必须要知道如何造轮子。
阅读本文章前,我们可以思考以下3个问题:
①足球运动员从底线跑到中场,我们如何设计(速度和距离之间采用P控制)
②方向盘加热,我们如何设计(目标温度和实际温度之间采用PI控制)
③四轴飞行器高空悬停,我们如何设计(采用PID控制)
第一个和第三个问题可以参考下面的资料,第二个为本人项目,原理分析和应用实现会基于方向盘加热展开。
需求描述:
1.目标温度和实际温度之间的差值大于阈值时采用全速加热,此时PWM的档位最高。
2.目标温度和实际温度之间的差值小于阈值时采用PI控制,此时PWM的档位动态变化,此为本次分析的重点。
3.D不适用于本场景,前面的问题3会涉及负增益也就是D。
PI控制的原理:
\(u[k] = _{Kp}.e[k]+_{Ki}.\sum_{i=0}^{k}e[i]\)
其中e[k]为error value,系统设置值和实际测量值之间的差值。在此例子中可以理解为目标温度和实际温度之间的差值。
Kp英文为proportional gain,比例增益。
Ki英文为integral gain,积分增益。
从数学式中可以看出比例增益固定的前提下,比例池随目标温度和实际温度之间的差值减小线性减小;积分池在积分增益固定的前提下随时间累加。
实际参数的设计和实物标定强相关。
参考资料:
https://www.youtube.com/watch?v=PRFCBVTFy90
https://www.youtube.com/watch?v=wkfEZmsQqiA&list=PLn8PRpmsu08pQBgjxYFXSsODEF3Jqmm-y

 浙公网安备 33010602011771号
浙公网安备 33010602011771号