摘要:  在视觉三维重建中,要获取稠密的三维点云,通常采用面结构光来实现。但是作为普通的开发者,昂贵的工业相机、投影仪、工装等设备令人望而却步。如何利用手上常见的设备,实现稠密点云重建呢?早在 1998 年,Jean-Yves Bouguety 与 Pietro Perona 就思考过类似这样的问题,他们发表了一篇名为 《3D photography on your desk》的论文,在论文中作者凭借极其简单的硬件(相机、点光源、铅笔/细棒、标定板,桌子)实现了稠密的3D重建,其重建误差可控制在0.1%以内。该方法甚至可以推广,利用太阳光实现汽车外形的三维重建,误差可在0.5%以内。 阅读全文
在视觉三维重建中,要获取稠密的三维点云,通常采用面结构光来实现。但是作为普通的开发者,昂贵的工业相机、投影仪、工装等设备令人望而却步。如何利用手上常见的设备,实现稠密点云重建呢?早在 1998 年,Jean-Yves Bouguety 与 Pietro Perona 就思考过类似这样的问题,他们发表了一篇名为 《3D photography on your desk》的论文,在论文中作者凭借极其简单的硬件(相机、点光源、铅笔/细棒、标定板,桌子)实现了稠密的3D重建,其重建误差可控制在0.1%以内。该方法甚至可以推广,利用太阳光实现汽车外形的三维重建,误差可在0.5%以内。 阅读全文
在视觉三维重建中,要获取稠密的三维点云,通常采用面结构光来实现。但是作为普通的开发者,昂贵的工业相机、投影仪、工装等设备令人望而却步。如何利用手上常见的设备,实现稠密点云重建呢?早在 1998 年,Jean-Yves Bouguety 与 Pietro Perona 就思考过类似这样的问题,他们发表了一篇名为 《3D photography on your desk》的论文,在论文中作者凭借极其简单的硬件(相机、点光源、铅笔/细棒、标定板,桌子)实现了稠密的3D重建,其重建误差可控制在0.1%以内。该方法甚至可以推广,利用太阳光实现汽车外形的三维重建,误差可在0.5%以内。 阅读全文
posted @ 2025-09-27 00:37
GShang
阅读(155)
评论(0)
推荐(2)
摘要:  在TVBox中,通过 chaquopy 实现了基于 python 爬虫的接口抽象。目前在一些更新比较频繁的类TVBox软件中均已支持,例如 Fongmi 影视、影视仓等。本文以 Fongmi 影视为参考,详细解读其中 Python 爬虫接口如何适配,各函数接口输入输出参数含义,使用场景等。 阅读全文
在TVBox中,通过 chaquopy 实现了基于 python 爬虫的接口抽象。目前在一些更新比较频繁的类TVBox软件中均已支持,例如 Fongmi 影视、影视仓等。本文以 Fongmi 影视为参考,详细解读其中 Python 爬虫接口如何适配,各函数接口输入输出参数含义,使用场景等。 阅读全文
在TVBox中,通过 chaquopy 实现了基于 python 爬虫的接口抽象。目前在一些更新比较频繁的类TVBox软件中均已支持,例如 Fongmi 影视、影视仓等。本文以 Fongmi 影视为参考,详细解读其中 Python 爬虫接口如何适配,各函数接口输入输出参数含义,使用场景等。 阅读全文
posted @ 2025-09-11 13:33
GShang
阅读(5135)
评论(0)
推荐(1)
 手动制作直播源。
手动制作直播源。  折腾了大概两三天,总算找到了比较官方的TVBox资料,在资源获取步骤中,一共有三种方式:jar包、js、python。python调试和部署都非常方便,于是基于 python 进行接口适配练习,以 SeedHub 这个电影网站作为影视资源网站。 影视仓下载:影视仓-6.1.4.1-exo161.ap
折腾了大概两三天,总算找到了比较官方的TVBox资料,在资源获取步骤中,一共有三种方式:jar包、js、python。python调试和部署都非常方便,于是基于 python 进行接口适配练习,以 SeedHub 这个电影网站作为影视资源网站。 影视仓下载:影视仓-6.1.4.1-exo161.ap  精确的标定对于大多数机器视觉和计算机视觉任务的性能至关重要。以下是我们通过大量实验和理论分析总结出的最佳实践建议
精确的标定对于大多数机器视觉和计算机视觉任务的性能至关重要。以下是我们通过大量实验和理论分析总结出的最佳实践建议  WWDC 2025 Liquid Glass Effect
WWDC 2025 Liquid Glass Effect 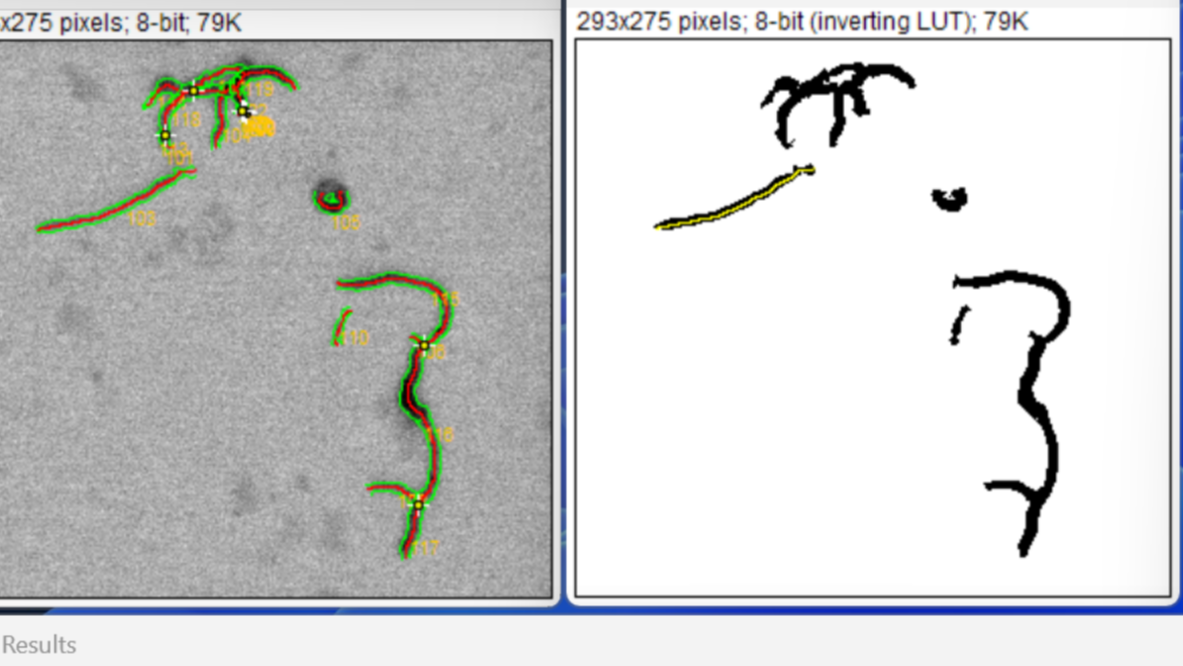 详细介绍了 Ridge Detection 脊线检测插件使用教程。
详细介绍了 Ridge Detection 脊线检测插件使用教程。 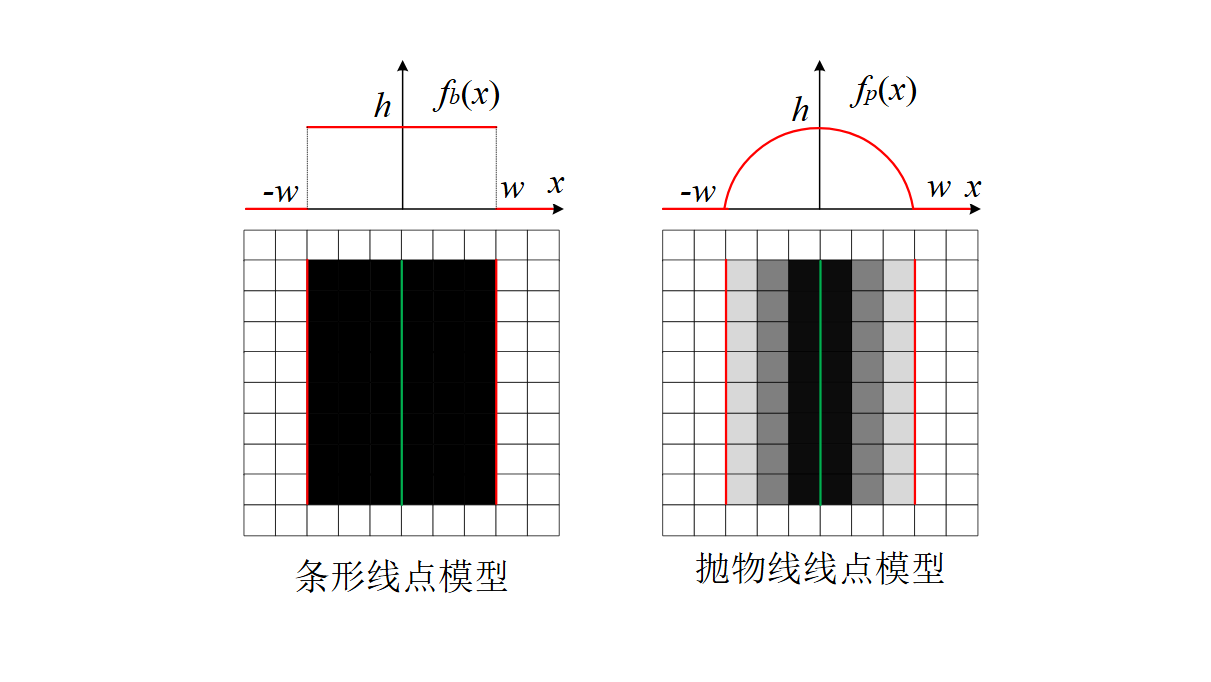 对steger提点算法的论文进行了精读和总结。
对steger提点算法的论文进行了精读和总结。  浙公网安备 33010602011771号
浙公网安备 33010602011771号