


直接法
前言
直接法是视觉里程计另一主要分支,它与特征点法有很大不同。随着SVO、LSD-SLAM等直接法SLAM方案的流行,直接法本身也得到越来越多的关注。特征点法与直接究竟谁更好一些,是近年视觉里程计研究领域一个非常有趣的问题。本讲,我们将介绍直接法的原理,并利用g2o实现基于直接法的视觉里程计。
1. 直接法的引出
尽管特征点法在视觉里程计中占据主流地位,研究者们认识它至少有以下几个缺点:
- 关键点的提取与描述子的计算非常耗时。实践当中,SIFT目前在CPU上是无法实时计算的,而ORB也需要近20毫秒的计算。如果整个SLAM以30毫秒/帧的速度运行,那么一大半时间都花在计算特征点上。
- 使用特征点时,忽略了除特征点以外的所有信息。一张图像有几十万个像素,而特征点只有几百个。只使用特征点丢弃了大部分可能有用的图像信息。
- 相机有时会运动到特征缺失的地方,往往这些地方都没有什么明显的纹理信息。例如,有时我们会面对一堵白墙,或者一个空荡荡的走廓。这些场景下特征点数量会明显减少,我们可能找不到足够的匹配点来计算相机运动。
我们看到使用特征点确实存在一些问题。针对这些缺点,也存在若干种可行的方法:
- 只计算关键点,不计算描述子。同时,使用光流法(Optical Flow)来跟踪特征点的运动。这样可以回避计算和匹配描述子带来的时间,但光流本身的计算需要一定时间;
- 只计算关键点,不计算描述子。同时,使用直接法来计算特征点在下一时刻图像的位置。这同样可以跳过描述子的计算过程,而且直接法的计算更加简单。
- 既不计算关键点、也不计算描述子——根据像素来直接计算相机运动。
第一种方法仍然使用特征点,只是把匹配描述子替换成了光流跟踪,估计相机运动时仍使用PnP或ICP算法。而在,后两个方法中,我们会根据图像的像素信息来计算相机运动,它们称为直接法。
使用特征点法估计相机运动时,我们把特征点看作固定在三维空间的不动点。根据它们在相机中的投影位置,通过最小化重投影误差(Reprojection error)来优化相机运动。在这个过程中,我们需要精确地知道空间点在两个相机中投影后的像素位置——这也就是我们为何要对特征进行匹配或跟踪的理由。而在直接法中,我们最小化的不再是重投影误差,而是测量误差(Phometric error)。
直接法是本讲介绍的重点。它的存在就是为了克服特征点法的上述缺点(虽然它会引入另一些问题)。直接法直接根据像素亮度信息,估计相机的运动,可以完全不用计算关键点和描述子。于是,直接法既避免了特征的计算时间,也避免了特征缺失的情况。只要场景中存在明暗变化(可以是渐变,不形成局部的图像特征),直接法就能工作。根据使用像素的数量,直接法分为稀疏、稠密和半稠密三种,具有恢复稠密结构的能力。相比于特征点法通常只能重构稀疏特征点,直接法和稠密重建有更紧密的联系。
历史上,虽然早期也有一些对直接法的使用,但直到RGB-D相机出现后,人们才发现直接法对RGB-D相机,进而对单目相机,都是行之有效的方法。随着一些使用直接法的开源项目的出现(如SVO、LSD-SLAM等),它们逐渐地走上主流舞台,成为视觉里程计算法中重要的一部分。
2. 直接法数学推导
直接法和光流非常相似,它们都是基于灰度不变假设的:
灰度不变假设:同一个空间点的像素灰度,在各个图像中是固定不变的。
灰度不变假设是一个很强的假设,实际当中很可能不成立。事实上,由于物体的材质不同,像素会出现高光和阴影部分;有时,相机会自动调整曝光参数,使得图像整体变亮或变暗。这些时候灰度不变假设都是不成立的,因此直接法/光流的结果也不一定可靠。不过,暂且让我们认为该假设成立,从而看看如何计算相机的运动。我们先介绍直接法的原理,然后使用g2o实现直接法。

考虑某个空间点 $P$ 和两个时刻的相机。$P$ 的世界坐标为 $[X,Y,Z]$,它在两个相机上成像,其非齐次像素坐标为 $\mathbf{p}_1, \mathbf{p}_2$。我们的目标是求第一个相机到第二个相机的相对位姿变换。设第一个相机旋转、平移为 $\mathbf{I}, \mathbf{0}$,第二个相机外参为 $\mathbf{R}, \mathbf{t}$(李代数为$\mathbf{\xi}$)。同时,两相机的内参相同,记为$\mathbf{K}$。为清楚起见,我们列写完整的投影方程:
\[{\mathbf{p}_1} = {\left[ \begin{array}{l}
u\\
v
\end{array} \right]_1} = \mathbf{D} \frac{1}{Z_1} \mathbf{KP} \]
\[{\mathbf{p}_2} = {\left[ \begin{array}{l}
u\\
v
\end{array} \right]_2} = \mathbf{D}\frac{1}{Z_2} \mathbf{K}\left( {\mathbf{RP} +\mathbf{t}} \right) = \mathbf{D}\frac{1}{Z_2} \mathbf{K} \exp \left( {{\mathbf{\xi} ^ \wedge }} \right) \mathbf{P}\]
其中 $Z_1,Z_2$ 是 $P$ 在两个相机坐标系下的深度坐标值。$\mathbf{D}$ 为齐次坐标到非齐次坐标的转换矩阵:
\[\begin{equation}
\mathbf{D} = \left[ {\begin{array}{*{20}{c}}
1&0&0\\
0&1&0
\end{array}} \right]
\end{equation}\]
在直接法中,我们同样是解一个优化问题,但这个优化最小化的不是重投影误差,而是测量误差(Photometric Error),也就是 $P$ 的两个像的亮度误差:
\[\begin{equation}
e = {\mathbf{I}_1}\left( {{\mathbf{p}_1}} \right) - {\mathbf{I}_2}\left( {{\mathbf{p}_2}} \right)
\end{equation}\]
我们优化该误差的二范数:
\[\begin{equation}
\mathop {\min }\limits_{\mathbf{\xi}} J\left( \mathbf{\xi} \right) = { e^T} e
\end{equation}\]
能够做这种优化的理由即灰度不变假设。在直接法中,我们假设一个空间点在各个视角下,成像的灰度是不变的。同样的,这依然是一个很强的假设,而且与光流法十分相似。实际当中,我们有许多个(比如$N$个)空间点$P_i$,那么,整个相机位姿估计问题变为:
\[\begin{equation}\label{key}
\mathop {\min }\limits_{\mathbf{\xi}} J\left( \mathbf{\xi} \right) = \sum\limits_{i = 1}^N {e_i^T{e_i}}, \quad {e_i} = { \mathbf{I}_1}\left( {{\mathbf{p}_{1,i}}} \right) - {\mathbf{I}_2}\left( {{ \mathbf{p}_{2,i}}} \right)
\end{equation}\]
为了求解这个优化问题,我们关心误差$e$是如何随着相机位姿$\mathbf{\xi}$变化的,需要分析它们的导数关系。因此,使用李代数上的扰动模型。我们给$\exp (\mathbf{\xi})$左乘一个小扰动$\exp( \delta \mathbf{\xi} )$,得:
\[\begin{equation}\begin{array}{ll}
e\left( { \mathbf{\xi} \oplus \delta \mathbf{\xi} } \right) &= { \mathbf{I} _1}\left( {\frac{1}{{{Z_1}}} \mathbf{DKP} } \right) - {\mathbf{I}_2}\left( {\frac{1}{{{Z_2}}} \mathbf{DK}\exp \left( {\delta {\mathbf{\xi} ^ \wedge }} \right)\exp \left( {{\mathbf{\xi} ^ \wedge }} \right) \mathbf{P}} \right)\\
& \approx {\mathbf{I}_1}\left( {\frac{1}{{{Z_1}}} \mathbf{DKP}} \right) - {\mathbf{I}_2}\left( {\frac{1}{{{Z_2}}} \mathbf{DK} \left( {1 + \delta {\mathbf{\xi} ^ \wedge }} \right)\exp \left( {{ \mathbf{\xi} ^ \wedge }} \right) \mathbf{P} } \right)\\
&= {\mathbf{I}_1}\left( {\frac{1}{{{Z_1}}} \mathbf{DKP}} \right) - {\mathbf{I}_2}\left( {\frac{1}{{{Z_2}}} \mathbf{DK}\exp \left( {{\mathbf{\xi} ^ \wedge }} \right) \mathbf{P} + \frac{1}{{{Z_2}}} \mathbf{DK} \delta { \mathbf{\xi} ^ \wedge }\exp \left( {{\mathbf{\xi} ^ \wedge }} \right) \mathbf{P}} \right)
\end{array}\end{equation}\]
记
\[\begin{equation}\begin{array}{ll}
\mathbf{q} &= \delta \mathbf{\xi} ^\wedge \exp \left( {{ \mathbf{\xi} ^ \wedge }} \right) \mathbf{P} \\
\mathbf{u} &= \frac{1}{{{Z_2}}} \mathbf{DK} \mathbf{q}
\end{array}\end{equation}\]
$\mathbf{q}$ 即 $P$ 在第二个相机坐标系下的坐标,而$\mathbf{u}$为它的像素坐标。于是,利用一阶泰勒展开,有:
\[\begin{equation}\begin{array}{ll}
e \left( { \mathbf{\xi} \oplus \delta \mathbf{\xi} } \right) &= {\mathbf{I}_1}\left( {\frac{1}{{{Z_1}}} \mathbf{DKP}} \right) - {\mathbf{I}_2}\left( {\frac{1}{{{Z_2}}} \mathbf{DK} \exp \left( {{\mathbf{\xi} ^ \wedge }} \right) \mathbf{P} + \mathbf{u}} \right)\\
& \approx { \mathbf{I}_1}\left( {\frac{1}{{{Z_1}}} \mathbf{DKP}} \right) - {\mathbf{I}_2}\left( {\frac{1}{{{Z_2}}} \mathbf{DK}\exp \left( {{\mathbf{\xi} ^ \wedge }} \right) \mathbf{P}} \right) - \frac{{\partial { \mathbf{I}_2}}}{{\partial \mathbf{u}}}\frac{{\partial \mathbf{u}}}{{\partial \mathbf{q}}}\frac{{\partial \mathbf{q}}}{{\partial \delta \mathbf{\xi} }}\delta \mathbf{\xi} \\
&= e\left( \mathbf{\xi} \right) - \frac{{\partial {\mathbf{I}_2}}}{{\partial \mathbf{u}}}\frac{{\partial \mathbf{u}}}{{\partial \mathbf{q}}}\frac{{\partial \mathbf{q}}}{{\partial \delta \mathbf{\xi} }}\delta \mathbf{\xi}
\end{array}\end{equation}\]
我们看到,一阶导数由于链式法则分成了三项,而这三项都是容易计算的:
- $ \partial \mathbf{I}_2 / \partial \mathbf{u} $ 为$\mathbf{u}$处的像素梯度;
- $ \partial \mathbf{u} / \partial \mathbf{q} $ 为投影方程关于相机坐标系下的三维点的导数。我们把投影方程展开,为: \[\begin{equation}
u = \frac{{{f_x}X + {c_x}}}{Z},v = \frac{{{f_y}Y + {c_y}}}{Z}
\end{equation}\]于是导数为:
\[\begin{equation}
\frac{{\partial \mathbf{u}}}{{\partial \mathbf{q}}} = \left[ {\begin{array}{*{20}{c}}
{\frac{{\partial u}}{{\partial X}}}&{\frac{{\partial u}}{{\partial Y}}}&{\frac{{\partial u}}{{\partial Z}}}\\
{\frac{{\partial v}}{{\partial X}}}&{\frac{{\partial v}}{{\partial Y}}}&{\frac{{\partial v}}{{\partial Z}}}
\end{array}} \right] = \left[ {\begin{array}{*{20}{c}}
{\frac{{{f_x}}}{{\rm{Z}}}}&0&{ - \frac{{{f_x}X}}{{{Z^2}}}}\\
0&{\frac{{{f_y}}}{Z}}&{ - \frac{{{f_y}Y}}{{{Z^2}}}}
\end{array}} \right]
\end{equation}\] - ${\partial \mathbf{q}}/{\partial \delta \mathbf{\xi} }$为变换后的三维点对变换的导数,这在李代数章节已经介绍过了:
\[\begin{equation}
\frac{{\partial \mathbf{q}}}{{\partial \delta \mathbf{\xi} }} = \left[ { \mathbf{I}, - {\mathbf{q}^ \wedge }} \right]
\end{equation}\]
在实践中,由于后两项只与三维点$\mathbf{q}$有关,而与图像无关,我们经常把它合并在一起:
\[\begin{equation}
\frac{{\partial \mathbf{u}}}{{\partial \delta \mathbf{\xi} }} = \left[ {\begin{array}{*{20}{c}}
{\frac{{{f_x}}}{Z}}&0&{ - \frac{{{f_x}X}}{{{Z^2}}}}&{ - \frac{{{f_x}XY}}{{{Z^2}}}}&{{f_x} + \frac{{{f_x}{X^2}}}{{{Z^2}}}}&{ - \frac{{{f_x}Y}}{Z}}\\
0&{\frac{{{f_y}}}{Z}}&{ - \frac{{{f_y}Y}}{{{Z^2}}}}&{ - {f_y} - \frac{{{f_y}{Y^2}}}{{{Z^2}}}}&{\frac{{{f_y}XY}}{{{Z^2}}}}&{\frac{{{f_y}X}}{Z}}
\end{array}} \right]
\end{equation}\]
于是,现在我们推导了误差相对于李代数的雅可比矩阵:
\[ \begin{equation}
\label{eq:jacobianofDirect}
\mathbf{J} = - \frac{{\partial { \mathbf{I}_2}}}{{\partial \mathbf{u}}}\frac{{\partial \mathbf{u}}}{{\partial \delta \mathbf{\xi} }}
\end{equation}\]
对于$N$个点的问题,我们可以用这种方法计算优化问题的雅可比,然后使用G-N或L-M计算增量,迭代求解。例如,在G-N方法下,增量$\delta {\mathbf{\xi} ^*} $的计算方式为:
\[\begin{equation}
\left( {\sum\limits_{i = 1}^N { \mathbf{J}_i^T \mathbf{J}_i} } \right)\delta {\mathbf{\xi} ^*} = - \sum\limits_{i = 1}^N {{\mathbf{J}_i^T}{e_i}}
\end{equation}\]
至此,我们推导了直接法估计相机位姿的整个流程,下面我们讲讲直接法是如何使用的。
3. 直接法的使用
在我们上面的推导中,$P$是一个已知位置的空间点,它是怎么来的呢?在RGB-D相机下,我们可以把任意像素反投影到三维空间,然后投影到下一个图像中。如果在单目相机中,我们也可以使用已经估计好位置的特征点(虽然是特征点,但直接法里是可以避免计算描述子的)。根据$P$的来源,我们可以把直接法进行分类:
- $P$来自于稀疏特征点,我们称之为稀疏直接法。通常我们使用数百个特征点,并且会像L-K光流那样,假设它周围像素也是不变的。这种稀疏直接法速度不必计算描述子,并且只使用数百个像素,因此速度最快,但只能计算稀疏的重构。
- $P$来自部分像素。我们看到式(\ref{eq:jacobianofDirect})中,如果像素梯度为零,整一项雅可比就为零,不会对计算运动增量有任何贡献。因此,可以考虑只使用带有梯度的像素点,舍弃像素梯度不明显的地方。这称之为半稠密(Semi-Dense)的直接法,可以重构一个半稠密结构。
- $P$为所有像素,称为稠密直接法。稠密重构需要计算所有像素(一般几十万至几百万个),因此多数不能在现有的 CPU上实时计算,需要GPU的加速。
可以看到,从稀疏到稠密重构,都可以用直接法来计算。它们的计算量是逐渐增长的。稀疏方法可以快速地求解相机位姿,而稠密方法可以建立完整地图。具体使用哪种方法,需要视机器人的应用环境而定。
4. 使用g2o实现直接法
现在,我们来演示如何使用稀疏的直接法。由于我们不涉及GPU编程,稠密的直接法就省略掉了。同时,为了保持程序简单,我们使用RGB-D数据而非单目数据,这样可以省略掉单目的深度恢复部分(这个很麻烦,我们之后另讲)。
求解直接法最后等价于求解一个优化问题,因此我们可以使用g2o这样的通用优化库帮助我们求解。在使用g2o之前,需要把直接法抽象成一个图优化问题。显然,直接法是由以下顶点和边组成的:
- 优化变量为一个相机位姿,因此需要一个位姿顶点。由于我们在推导中使用了李代数,故程序中使用李代数表达的$SE(3)$位姿顶点,如g2o/types/types\_six\_dof\_expmap.h中的“VertexSE3Expmap”。
- 误差项为一个像素的测量误差。由于整个优化过程中$\mathbf{I}_1(\mathbf{p}_1)$保持不变,我们可以把它当成一个固定的预设值,从而调整相机位姿,使$\mathbf{I}_2(\mathbf{p}_2)$接近这个值。于是,这种边只连接一个顶点,为 一元边。由于g2o中本身没有计算测量误差的边,我们需要自己定义一种新的边。
整个直接法图优化问题是由一个相机位姿顶点与许多条一元边组成。如果使用稀疏的直接法,那我们大约会有几百至几千条这样的边;稠密直接法则会有几十万条边。优化问题对应的线性方程是计算李代数增量(6$\times$1),本身规模不大,所以主要的计算时间会花费在每条边的误差与雅可比的计算上。下面的实验中,我们先来定义一种专门用于计算直接法的边,然后,使用该边构建图优化问题并求解之。
实验工程位于:https://github.com/gaoxiang12/slambook 中的 ch8/directMethod中。
工程目录下的g2o\_types.h中给出了自定义边的声明,g2o\_types.cpp中给出实现,我们在CMakeLists.txt里将它们编译了成一个库。


1 #ifndef G2O_TYPES_DIRECT_H_ 2 #define G2O_TYPES_DIRECT_H_ 3 4 // 定义应用于直接法的g2o边 5 #include <Eigen/Geometry> 6 #include <g2o/core/base_unary_edge.h> 7 #include <g2o/types/sba/types_six_dof_expmap.h> 8 #include <opencv2/core/core.hpp> 9 namespace g2o 10 { 11 // project a 3d point into an image plane, the error is photometric error 12 // an unary edge with one vertex SE3Expmap (the pose of camera) 13 class EdgeSE3ProjectDirect: public BaseUnaryEdge< 1, double, VertexSE3Expmap> 14 { 15 public: 16 EIGEN_MAKE_ALIGNED_OPERATOR_NEW 17 18 EdgeSE3ProjectDirect() {} 19 20 EdgeSE3ProjectDirect( Eigen::Vector3d point, float fx, float fy, float cx, float cy, cv::Mat* image ) 21 : x_world_(point), fx_(fx), fy_(fy), cx_(cx), cy_(cy), image_(image) 22 {} 23 24 virtual void computeError(); 25 26 // plus in manifold 27 virtual void linearizeOplus( ); 28 29 // dummy read and write functions because we don't care... 30 virtual bool read( std::istream& in ); 31 virtual bool write( std::ostream& out ) const ; 32 33 protected: 34 float getPixelValue( float x, float y ); 35 public: 36 // 3d point in world frame 37 Eigen::Vector3d x_world_; 38 // Pinhole camera intrinsics 39 float cx_=0, cy_=0, fx_=0, fy_=0; 40 // the reference image 41 cv::Mat* image_=nullptr; 42 }; 43 } // namespace g2o 44 #endif // G@O_TYPES_DIRECT_H_
我们的边继承自g2o::BaseUnaryEdge。在继承时,需要在模板参数里填入测量值的维度、类型,以及连接此边的顶点,同时,我们把空间点$P$、相机内参和图像存储在该边的成员变量中。为了让g2o优化该边对应的误差,我们需要覆写两个虚函数:用computeError()计算误差值,用linearizeOplus()计算雅可比。其余的存储和读取函数,由于本次实验不关心,就略去了。下面我们给出这两个函数的实现:
1 #include "g2o_types.h" 2 #include <g2o/core/factory.h> 3 4 #include <iostream> 5 6 using namespace std; 7 8 namespace g2o 9 { 10 11 G2O_REGISTER_TYPE(EDGE_PROJECT_SE3_DIRECT, EdgeSE3ProjectDirect ); 12 13 // compute the photometric error 14 void EdgeSE3ProjectDirect::computeError() 15 { 16 const VertexSE3Expmap* v =static_cast<const VertexSE3Expmap*> ( _vertices[0] ); 17 Eigen::Vector3d x_local = v->estimate().map ( x_world_ ); 18 float x = x_local[0]*fx_/x_local[2] + cx_; 19 float y = x_local[1]*fy_/x_local[2] + cy_; 20 // check x,y is in the image 21 if ( x-4<0 || ( x+4 ) >image_->cols || ( y-4 ) <0 || ( y+4 ) >image_->rows ) 22 _error(0,0) = 999.0; 23 else 24 { 25 _error(0,0) = getPixelValue(x,y) - _measurement; 26 } 27 } 28 29 // the bilinear interpolated pixel value 30 float EdgeSE3ProjectDirect::getPixelValue ( float x, float y ) 31 { 32 uchar* data = & image_->data[ int(y) * image_->step + int(x) ]; 33 float xx = x - floor ( x ); 34 float yy = y - floor ( y ); 35 float v = ( 36 ( 1-xx ) * ( 1-yy ) * data[0] + 37 xx* ( 1-yy ) * data[1] + 38 ( 1-xx ) *yy*data[ image_->step ] + 39 xx*yy*data[image_->step+1] 40 ); 41 return v; 42 } 43 44 // plus in manifold 45 void EdgeSE3ProjectDirect::linearizeOplus() 46 { 47 VertexSE3Expmap* vtx = static_cast<VertexSE3Expmap*> ( _vertices[0] ); 48 49 Eigen::Vector3d xyz_trans = vtx->estimate().map ( x_world_ ); 50 51 double x = xyz_trans[0]; 52 double y = xyz_trans[1]; 53 double invz = 1.0/xyz_trans[2]; 54 double invz_2 = invz*invz; 55 56 float u = x*fx_*invz + cx_; 57 float v = y*fy_*invz + cy_; 58 59 // jacobian from se3 to u,v 60 // note that in g2o the Lie algebra is (\omega, \epsilon), where \omega is so(3) and \epsilon the translation 61 Eigen::Matrix<double, 2, 6> jacobian_uv_ksai; 62 63 jacobian_uv_ksai ( 0,0 ) = - x*y*invz_2 *fx_; 64 jacobian_uv_ksai ( 0,1 ) = ( 1+ ( x*x*invz_2 ) ) *fx_; 65 jacobian_uv_ksai ( 0,2 ) = - y*invz *fx_; 66 jacobian_uv_ksai ( 0,3 ) = invz *fx_; 67 jacobian_uv_ksai ( 0,4 ) = 0; 68 jacobian_uv_ksai ( 0,5 ) = -x*invz_2 *fx_; 69 70 jacobian_uv_ksai ( 1,0 ) = -( 1+y*y*invz_2 ) *fy_; 71 jacobian_uv_ksai ( 1,1 ) = x*y*invz_2 *fy_; 72 jacobian_uv_ksai ( 1,2 ) = x*invz *fy_; 73 jacobian_uv_ksai ( 1,3 ) = 0; 74 jacobian_uv_ksai ( 1,4 ) = invz *fy_; 75 jacobian_uv_ksai ( 1,5 ) = -y*invz_2 *fy_; 76 77 Eigen::Matrix<double, 1, 2> jacobian_pixel_uv; 78 79 jacobian_pixel_uv ( 0,0 ) = ( getPixelValue(u+1,v)-getPixelValue(u,v) ); 80 jacobian_pixel_uv ( 0,1 ) = ( getPixelValue(u,v+1)-getPixelValue(u,v) ); 81 82 _jacobianOplusXi = jacobian_pixel_uv*jacobian_uv_ksai; 83 } 84 bool EdgeSE3ProjectDirect::read( std::istream& in ) 85 { 86 return true; 87 } 88 89 bool EdgeSE3ProjectDirect::write( std::ostream& out ) const 90 { 91 return true; 92 } 93 94 95 }// namespace g2o
可以看到,这里的雅可比计算与式(\ref{eq:jacobianofDirect})是一致的。注意我们在程序中的误差计算里,使用了$\mathbf{I}_2(\mathbf{p}_2) - \mathbf{I}_1(\mathbf{p}_1)$的形式,因此前面的负号可以省去,只需把像素梯度乘以像素到李代数的梯度即可。
在程序中,相机位姿是用浮点数表示的,投影到像素坐标也是浮点形式。为了更精细地计算像素亮度,我们要对图像进行插值。我们这里采用了简单的双线性插值,您也可以使用更复杂的插值方式,但计算代价可能会变高一些。
5. 使用直接法估计相机运动
定义了g2o边后,我们将节点和边组合成图,就可以调用g2o进行优化了。实现代码位于 slambook/ch8/directMethod/direct\_sparse.cpp中,请读者阅读该部分代码并编译它。我们将代码编译的步骤留作习题吧(一脸贱笑中)。
1 #include <iostream> 2 #include <fstream> 3 #include <list> 4 #include <vector> 5 #include <chrono> 6 #include <ctime> 7 #include <climits> 8 9 #include <opencv2/core/core.hpp> 10 #include <opencv2/imgproc/imgproc.hpp> 11 #include <opencv2/highgui/highgui.hpp> 12 #include <opencv2/features2d/features2d.hpp> 13 14 #include "g2o_types.h" 15 #include <g2o/core/block_solver.h> 16 #include <g2o/core/optimization_algorithm_gauss_newton.h> 17 #include <g2o/solvers/dense/linear_solver_dense.h> 18 #include <g2o/core/robust_kernel.h> 19 #include <g2o/types/sba/types_six_dof_expmap.h> 20 21 using namespace std; 22 23 // 一次测量的值,包括一个世界坐标系下三维点与一个灰度值 24 struct Measurement 25 { 26 Measurement( Eigen::Vector3d p, float g ): pos_world(p), grayscale(g) {} 27 Eigen::Vector3d pos_world; 28 float grayscale; 29 }; 30 31 inline Eigen::Vector3d project2Dto3D ( int x, int y, int d, float fx, float fy, float cx, float cy, float scale ) 32 { 33 float zz = float ( d ) /scale; 34 float xx = zz* ( x-cx ) /fx; 35 float yy = zz* ( y-cy ) /fy; 36 return Eigen::Vector3d ( xx, yy, zz ); 37 } 38 39 inline Eigen::Vector2d project3Dto2D( float x, float y, float z, float fx, float fy, float cx, float cy ) 40 { 41 float u = fx*x/z+cx; 42 float v = fy*y/z+cy; 43 return Eigen::Vector2d(u,v); 44 } 45 46 // 直接法估计位姿 47 // 输入:测量值(空间点的灰度),新的灰度图,相机内参; 输出:相机位姿 48 // 返回:true为成功,false失败 49 bool poseEstimationDirect( const vector<Measurement>& measurements, cv::Mat* gray, Eigen::Matrix3f& intrinsics, Eigen::Isometry3d& Tcw ); 50 51 int main ( int argc, char** argv ) 52 { 53 if ( argc != 2 ) 54 { 55 cout<<"usage: useLK path_to_dataset"<<endl; 56 return 1; 57 } 58 srand( (unsigned int) time(0) ); 59 string path_to_dataset = argv[1]; 60 string associate_file = path_to_dataset + "/associate.txt"; 61 62 ifstream fin ( associate_file ); 63 64 string rgb_file, depth_file, time_rgb, time_depth; 65 cv::Mat color, depth, gray; 66 vector<Measurement> measurements; 67 // 相机内参 68 float cx = 325.5; 69 float cy = 253.5; 70 float fx = 518.0; 71 float fy = 519.0; 72 float depth_scale = 1000.0; 73 Eigen::Matrix3f K; 74 K<<fx,0.f,cx,0.f,fy,cy,0.f,0.f,1.0f; 75 76 Eigen::Isometry3d Tcw = Eigen::Isometry3d::Identity(); 77 78 cv::Mat prev_color; 79 // 我们演示两个图像间的直接法计算 80 for ( int index=0; index<2; index++ ) 81 { 82 cout<<"*********** loop "<<index<<" ************"<<endl; 83 fin>>time_rgb>>rgb_file>>time_depth>>depth_file; 84 color = cv::imread ( path_to_dataset+"/"+rgb_file ); 85 depth = cv::imread ( path_to_dataset+"/"+depth_file, -1 ); 86 cv::cvtColor ( color, gray, cv::COLOR_BGR2GRAY ); 87 if ( index ==0 ) 88 { 89 // 对第一帧提取FAST特征点 90 vector<cv::KeyPoint> keypoints; 91 cv::Ptr<cv::FastFeatureDetector> detector = cv::FastFeatureDetector::create(); 92 detector->detect ( color, keypoints ); 93 for ( auto kp:keypoints ) 94 { 95 // 去掉邻近边缘处的点 96 if ( kp.pt.x < 20 || kp.pt.y < 20 || (kp.pt.x+20)>color.cols || (kp.pt.y+20)>color.rows ) 97 continue; 98 ushort d = depth.ptr<ushort> ( int( kp.pt.y ) ) [ int(kp.pt.x) ]; 99 if ( d==0 ) 100 continue; 101 Eigen::Vector3d p3d = project2Dto3D ( kp.pt.x, kp.pt.y, d, fx, fy, cx, cy, depth_scale ); 102 float grayscale = float ( gray.ptr<uchar> ( int(kp.pt.y) ) [ int(kp.pt.x) ] ); 103 measurements.push_back ( Measurement( p3d, grayscale ) ); 104 } 105 prev_color = color.clone(); 106 continue; 107 } 108 // 使用直接法计算相机运动及投影点 109 chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); 110 poseEstimationDirect( measurements, &gray, K, Tcw ); 111 chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); 112 chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>( t2-t1 ); 113 cout<<"direct method costs time: "<<time_used.count()<<" seconds."<<endl; 114 cout<<"Tcw="<<Tcw.matrix()<<endl; 115 116 // plot the feature points 117 cv::Mat img_show( color.rows, color.cols*2, CV_8UC3 ); 118 prev_color.copyTo( img_show( cv::Rect(0,0,color.cols, color.rows) ) ); 119 color.copyTo( img_show(cv::Rect(color.cols,0,color.cols, color.rows)) ); 120 for ( Measurement m:measurements ) 121 { 122 Eigen::Vector3d p = m.pos_world; 123 Eigen::Vector2d pixel_prev = project3Dto2D( p(0,0), p(1,0), p(2,0), fx, fy, cx, cy ); 124 Eigen::Vector3d p2 = Tcw*m.pos_world; 125 Eigen::Vector2d pixel_now = project3Dto2D( p2(0,0), p2(1,0), p2(2,0), fx, fy, cx, cy ); 126 127 float b = 255*float(rand())/RAND_MAX; 128 float g = 255*float(rand())/RAND_MAX; 129 float r = 255*float(rand())/RAND_MAX; 130 cv::circle(img_show, cv::Point2d(pixel_prev(0,0), pixel_prev(1,0)), 5, cv::Scalar(b,g,r),1 ); 131 cv::circle(img_show, cv::Point2d(pixel_now(0,0)+color.cols, pixel_now(1,0)), 5, cv::Scalar(b,g,r),1 ); 132 cv::line( img_show, cv::Point2d(pixel_prev(0,0), pixel_prev(1,0)), cv::Point2d(pixel_now(0,0)+color.cols, pixel_now(1,0)), cv::Scalar(b,g,r), 1 ); 133 } 134 cv::imshow( "result", img_show ); 135 cv::waitKey(0); 136 137 } 138 return 0; 139 } 140 141 bool poseEstimationDirect ( const vector< Measurement >& measurements, cv::Mat* gray, Eigen::Matrix3f& K, Eigen::Isometry3d& Tcw ) 142 { 143 // 初始化g2o 144 typedef g2o::BlockSolver<g2o::BlockSolverTraits<6,1>> DirectBlock; // 求解的向量是6*1的 145 DirectBlock::LinearSolverType* linearSolver = new g2o::LinearSolverDense< DirectBlock::PoseMatrixType > (); 146 DirectBlock* solver_ptr = new DirectBlock( linearSolver ); 147 g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton( solver_ptr ); 148 g2o::SparseOptimizer optimizer; 149 optimizer.setAlgorithm( solver ); 150 optimizer.setVerbose( true ); // 打开调试输出 151 152 g2o::VertexSE3Expmap* pose = new g2o::VertexSE3Expmap(); 153 pose->setEstimate( g2o::SE3Quat(Tcw.rotation(), Tcw.translation()) ); 154 pose->setId(0); 155 optimizer.addVertex( pose ); 156 157 // 添加边 158 int id=1; 159 for( Measurement m: measurements ) 160 { 161 g2o::EdgeSE3ProjectDirect* edge = new g2o::EdgeSE3ProjectDirect( 162 m.pos_world, 163 K(0,0), K(1,1), K(0,2), K(1,2), gray 164 ); 165 edge->setVertex( 0, pose ); 166 edge->setMeasurement( m.grayscale ); 167 edge->setInformation( Eigen::Matrix<double,1,1>::Identity() ); 168 edge->setId( id++ ); 169 optimizer.addEdge(edge); 170 } 171 cout<<"edges in graph: "<<optimizer.edges().size()<<endl; 172 optimizer.initializeOptimization(); 173 optimizer.optimize(10); 174 Tcw = pose->estimate(); 175 }
在这个实验中,我们读取TUM数据集的两对RGB-D图像。然后,对第一张图像提取FAST关键点(不需要描述子),并使用直接法估计这些关键点在第二个图像中的位置,以及第二个图像的相机位姿。这就构成了一种简单的稀疏直接法。最后,我们画出这些关键点在第二个图像中的投影。运行
build/direct_sparse ~/dataset/rgbd_dataset_freiburg1_desk
程序会在作图之后暂停,您可以特征点的位置关系,也可以看到迭代误差的下降过程。图:稀疏直接法的实验。左:误差随着迭代下降。右:参考帧与后1至3帧对比(选取部分关键点)。

6. 直接法的讨论
相比于特征点法,直接法完全依靠像优化来求解相机位姿。从式(\ref{eq:jacobianofDirect})中可以看到,像素梯度引导着优化的方向。如果我们想要得到正确的优化结果,就必须保证大部分像素梯度能够把优化引导到正确的方向。
这是什么意思呢?我们希望更深入地理解直接法的做法。现在,我们来扮演一下优化算法。假设对于参考图像,我们测量到一个灰度值为229的像素。并且,由于我们知道它的深度,可以推断出空间点$P$的位置。
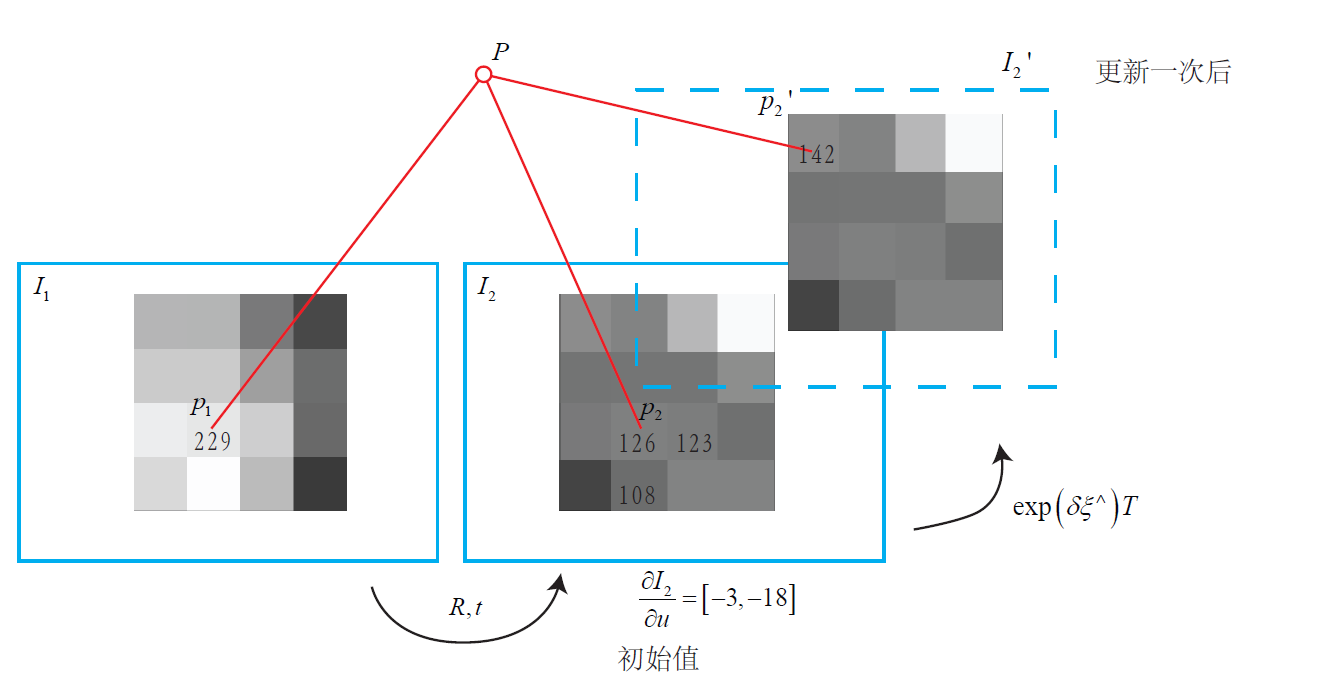
此时我们又得到了一张新的图像,需要估计它的相机位姿。这个位姿是由一个初值再上不断地优化迭代得到的。假设我们的初值比较差,在这个初值下,空间点$P$投影后的像素灰度值是126。于是,这个像素的误差为$229-126=103$,我们希望微调相机的位姿,使像素更亮一些。
怎么知道往哪里微调,像素会更亮呢?这就需要用到像素梯度。我们在图像中发现,沿$u$轴往前走一步,该处的灰度值变成了123,即减去了3。同样地,沿$v$轴往前走一步,灰度值减18,变成108。在这个像素周围,我们看到梯度是$[-3,-18]$,为了提高亮度,我们会建议优化算法微调相机,使$P$的像往左上方移动。由于这个梯度是在局部求解的,这个移动量不能太大。
但是,优化算法不能只听这个像素的一面之词,还需要听取其他像素的建议。综合听取了许多像素的意见之后,优化算法选择了一个和我们建议的方向偏离不远的地方,计算出一个更新量$\exp ({\mathbf{\xi}^\wedge } )$。加上更新量后,图像从$I_2$移动到了$I_2'$,像素的投影位置也变到了一个更亮的地方。我们看到,通过这次更新,误差变小了。在理想情况下,我们期望误差会不断下降,最后收敛。
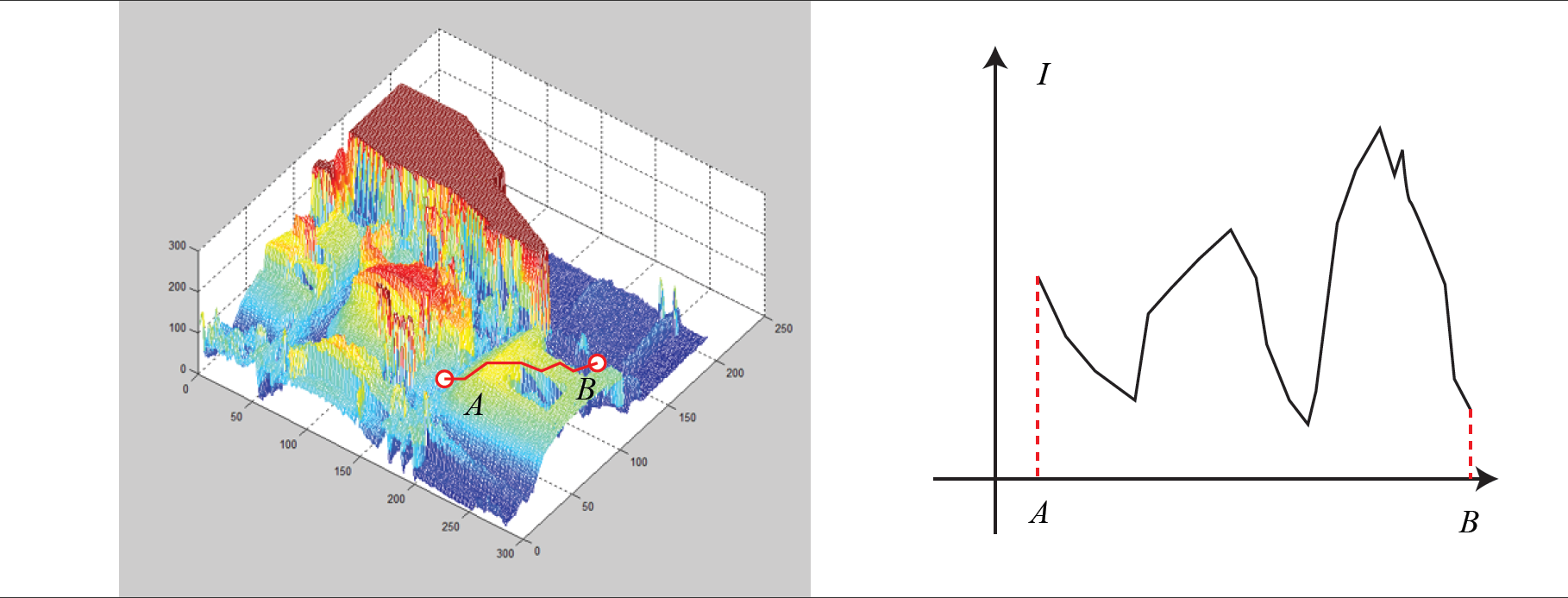
但是实际是不是这样呢?我们是否真的只要沿着梯度方向走,就能走到一个最优值?注意到,直接法的梯度是直接由图像梯度确定的,因此我们必须保证沿着图像梯度走时,灰度误差会不断下降。然而,图像通常是一个很强烈的非凸函数,如下图所示。实际当中,如果我们沿着图像梯度前进,很容易由于图像本身的非凸性(或噪声)落进一个局部极小值中,无法继续优化。只有当相机运动很小,图像中的梯度不会有很强的非凸性时,直接法才能成立。
在例程中,我们只计算了单个像素的差异,并且这个差异是由灰度直接相减得到的。然而,单个像素没有什么区分性,周围很可能有好多像素和它的亮度差不多。所以,我们有时会使用小的图像块(patch),并且使用更复杂的差异度量方式,例如归一化相关性(Normalized Cross Correlation,NCC)等。而例程为了简单起见,使用了误差的平方和,以保持和推导的一致性。
7. 直接法的优缺点总结
最后,我们总结一下直接法的优缺点。大体来说,它的优点如下:
- 可以省去计算特征点、描述子的时间。
- 只要求有像素梯度即可,无须特征点。因此,直接法可以在特征缺失的场合下使用。比较极端的例子是只有渐变的一张图像。它可能无法提取角点类特征,但可以用直接法估计它的运动。
- 可以构建半稠密乃至稠密的地图,这是特征点法无法做到的。
另一方面,它的缺点也很明显:
- 非凸性——直接法完全依靠梯度搜索,降低目标函数来计算相机位姿。其目标函数中需要取像素点的灰度值,而图像是强烈非凸的函数。这使得优化算法容易进入极小,只在运动很小时直接法才能成功。
- 单个像素没有区分度。找一个和他像的实在太多了!——于是我们要么计算图像块,要么计算复杂的相关性。由于每个像素对改变相机运动的“意见”不一致。只能少数服从多数,以数量代替质量。
- 灰度值不变是很强的假设。如果相机是自动曝光的,当它调整曝光参数时,会使得图像整体变亮或变暗。光照变化时亦会出现这种情况。特征点法对光照具有一定的容忍性,而直接法由于计算灰度间的差异,整体灰度变化会破坏灰度不变假设,使算法失败。
直接法就是这样一种优缺点都非常明显的方法,你有没有爱上它呢?

 浙公网安备 33010602011771号
浙公网安备 33010602011771号