电机控制笔记:BLDC控制原理
基本概念
BLDCM(Brushless Direct Current Motor)指无刷直流电机,常简称BLDC. 无刷电机指无电刷和换向器(或集电环)的电机,又称无换向器电机. 无刷直流电机不使用机械电刷(有刷电机),而使用方波自控式永磁同步电机.
BLDC使用电枢绕组作为定子,使用钕铁硼的永磁材料作为转子,以霍尔传感器取代碳刷换向器,性能比一般的传统直流电机有很大优势.
无刷交流电机(BLACM,通常简称BLAC)是使用正弦波控制的永磁同步电机.
PMSM包括BLDCM、BLACM,但通常仅指BLACM.
BLDC重要参数
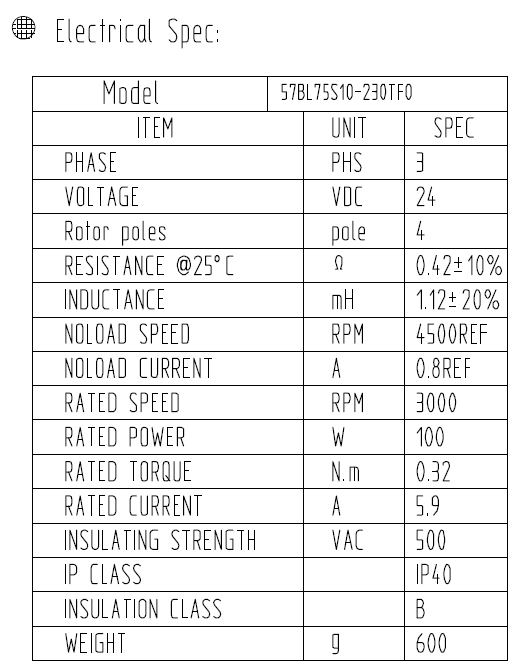
以野火BLDC(型号57BL75S10-230TF9,以下简称57BL75S10)为例:
额定电压
无刷电机适合的工作电压,通常非常广泛. 额定电压是指定了负载条件而得出的情况,即由工作环境决定.
e.g. 2212-850KV电机指定了1045 螺旋桨的负载,其额定工作电压就是11V;如果减小负载,如带7040 螺旋桨,那么该电机可在22V电压下工作.
57BL75S10的额定电压24V(无负载)
KV值
有刷直流电机根据额定工作电压来标注额定转速的,BLDC引入了KV值概念,用户可直观知道BLDC在具体的工作电压下的具体转速.
物理意义:在1V工作电压下,每分钟转速.
e.g. 2212-850KV 电机在10V 电压下的转速: 850*10=8500RPM(RPM,每分钟转速).
\(KV值∝1/匝数\)
2212-850KV匝数30T(15圈),那么在28T的情况下的KV值:850KV*30T/28T=910KV
转矩与转速
转矩: (力矩、扭矩)电机中转子产生,可用来带动机械负载的驱动力矩,可理解为电机的力量. 单位:\(N·m\)
转矩计算通用公式:
其中,M代表转矩,F代表作用力,r代表力臂长度,即从旋转轴(支点)到力的作用点的垂直距离.
转速: 电机每分钟的转速,单位:\(r/min(rpm)\)
转矩和转速的乘积是一个定数(功率一定情况下):
最大电流和最大功率
- 最大功率有以下几个含义:
额定功率 (Rated Power) ,通常意义的最大功率:指电机在额定电压、额定频率、额定冷却条件下,能够长期、连续、稳定输出而不会过热损坏的最大功率.
最大瞬时功率(Overload Power),也叫过载功率:指电机在短时间内(如几分钟、甚至几秒钟)能够输出的、超过额定功率的功率. 不能长时间运行,通常只能维持数十秒.
如果工作超过最大功率,可能导致电机高温烧毁.
峰值功率 (Peak Power):电机在极短时间内(通常以s, ms计)能够爆发出的绝对最大功率. 这是电机电磁设计和散热设计的极限,通常只能维持几秒.
常见于伺服电机和电动汽车驱动电机
- 最大电流有以下几个含义:
额定电流(Rated Current): 指在额定工作条件(额定电压、额定频率、额定负载、额定冷却)下,能够长期、连续、安全运行而不会损坏、衰退的最大电流值.
过载电流(Overload Current):短期允许的“最大”电流
峰值电流 (Peak Current):绝对“最大”电流
槽极结构(N:槽数,P:极数)
铁芯极数(槽数N)∶ 定子硅钢片的槽数量;
磁钢极数(极数P,即极对数)∶ 转子上磁钢的数量
模型常见的内转子无刷电机结构: 3N2P(有感电机常用)、12N4P(大部分内转子电机)
模型常见的外转子无刷电机结构:9N6P、9N12P、12N8P、12N10P、12N14P、18N16P、24N20P
用内转子无刷电机极数不高的原因:内转子电机多用于减速使用,所以要求的转速都比较高
电子控制器支持的最高电子转速通常是常数,所以如果极对数太高的话,支持的最高电机转速就会下降,所以目前的内转子电机极数都是4以内.
其他设计驱动需要的参数
定子电感:电动机静止时,定子绕组两端的电感;
定子电阻:在20℃ 下,电动机每相绕组的直流电阻;
反电动势系数:在规定条件下,电动机绕组开路时,单位转速在电枢绕组中所产生的线感应电动势值
BLDC工作原理
安培定则(右手螺旋定则)
安培定则,也叫右手螺旋定则,表示电流和电流激发磁场的磁感线方向间关系的定则.
通电直导线中的安培定则(安培定则一):用右手握住通电直导线,让大拇指指向电流的方向,那么四指指向就是磁感线的环绕方向
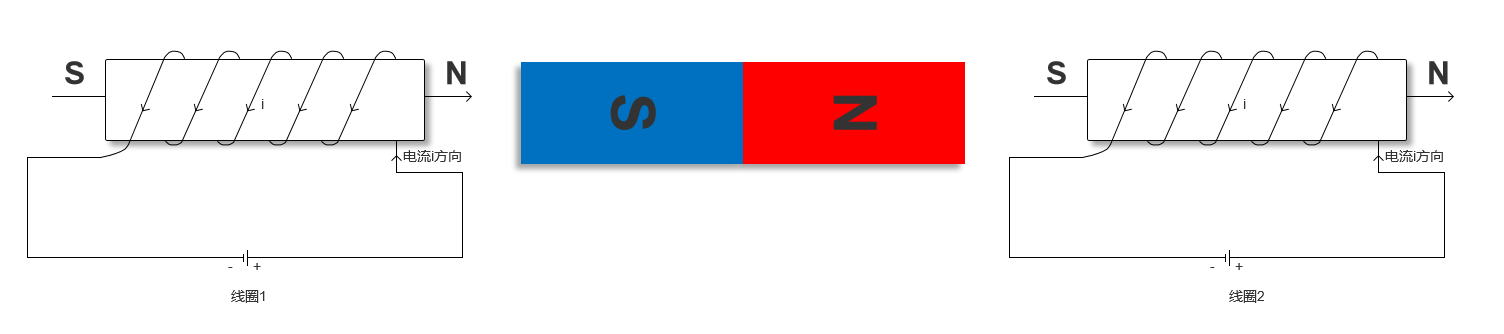
通电螺线管中的安培定则(安培定则二):用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端是通电螺线管的N 极.
安培定责二,如下图:

对于磁极,同性相斥,异性相吸,即N极与S极相互吸引,N极与N极相互排斥,S极与S极相互排斥.
直流通电线圈模型
下图是直流通电线圈与磁极的模型:
通电线圈产生的磁场方向,磁极运动方向如下图

下图是最终运行到的稳态,此时,转子不会受到垂直方向的力,但如果有转速的话,会保持惯性继续运动,从而受到垂直方向的力
三相星形联结模型
下图中,A、B、C 3个线圈是定子,中间包含N-S极的磁体是转子:
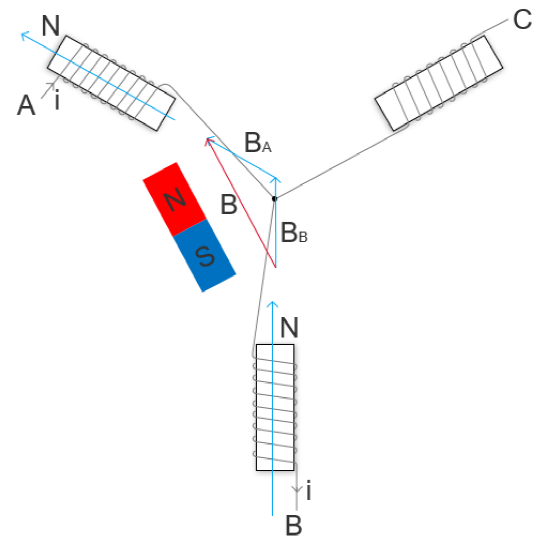
A端接电源+,B端接电源-,那么线圈可以产生如上图所示磁场:A线圈产生磁场\(B_A\),B线圈产生磁场\(B_B\),2个磁场矢量合成磁场\(B\). 此时,磁体可保持上图中的方向,即稳态.
六步换向
如果想要三相星形联结模型中的转子转动起来,就需要研究下图6个过程.
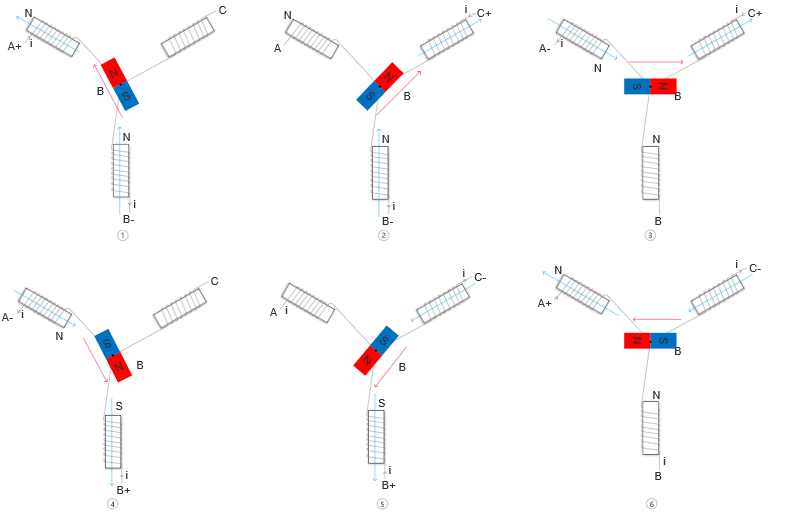
以磁极顺时针旋转为例,
- A接入电源+,B接入电源-,C悬空,转子会旋转至图①位置;
- 在①基础上,C接入+,B接入-,A悬空,转子将从①位置旋转至图②位置;
- 在②基础上,C接入+,A接入-,B悬空,转至将从②位置旋转至图③位置;
- 在③基础上,B接入+,A接入-,C悬空,转子将从③位置旋转至图④位置;
- 在④基础上,B接入+,C接入-,A悬空,转子将从④位置旋转至图⑤位置;
- 在⑤基础上,A接入+,C接入-,B悬空,转子将从⑤位置旋转至图⑥位置.
转子旋转至⑥位置后,再重复①的供电状态,转子将从⑥位置旋转至①位置,从而重复上面的过程. 经过这6个过程,转子刚好旋转一周,我们称这种驱动方法为6拍工作方式,每次电压变化称为换相,因此,这种方法也称为六步换相法. 按上面转子状态持续给电压,就能让电机持续旋转.
综上,顺时针旋转情况下,相线圈依次接通顺序为:
\((A+,B-,C×)\to (A×,B-,C+)\to (A-,B×,C+)\to (A-,B+,C×)\to (A×,B+,C-)\to (A+,B×,C-)\)
其中,\(+\) 代表接通电源+极;\(-\) 代表接通电源-极;\(×\)代表悬空.
同理,逆时针旋转情况下,相线圈依次接通顺序为(顺时针情况的反过程):
\((A+,B-,C×)\leftarrow (A×,B-,C+)\leftarrow (A-,B×,C+)\leftarrow (A-,B+,C×)\leftarrow (A×,B+,C-)\leftarrow (A+,B×,C-)\)
BLDC驱动电路
控制原理设计、分析
可设计如下电路,用MCU控制6个MOS管(功率管,即Q1,Q2,Q3,Q4,Q5,Q6),根据转子状态切换线圈的供电. 该电路称为三相六臂全桥驱动电路.
原理图:

三相与六桥臂关系:
- U相上桥臂由Q1控制,下桥臂由Q2控制
- V相上桥臂由Q3控制,下桥臂由Q4控制
- W相上桥臂由Q5控制,下桥臂由Q6控制
因为MCU引脚驱动能力不足,所以需要MCU控制专用IC驱动MOS管. 如野火电机驱动板使用专用IC IR2110STRPBF ,MOS管 IPD082N10N3G (参见ebf_brushless motordriver_20201020_原理图.pdf)
当Q1Q4导通(其他都不导通)时,那么电流将从Q1流经U相绕组,再从V相绕组流到Q4,完成六步换相中第1步;
同理,依次导通Q5Q4,Q5Q2,Q3Q2,Q3Q6,Q1Q6,就能完成六步换相中第2,3,4,5,6步.
综上,顺时针旋转时,MOS导通顺序:
逆时针旋转时,MOS管导通顺序:
有一个问题:我们如何知道上一步导通的是哪2个MOS管?第一步中MOS管导通时转子位置是我们人为规定的,但实际我们并不知道转子在哪里. 所以我们如何知道启动时,转子位置呢?
六步换相中,我们不需要知道转子的连续位置,只需要知道转子换相点的位置.
获取转子位置,通常有两种方法:
1)用传感器,例如Hall传感器;
2)不用传感器,例如无位置传感器控制.
Hall传感器模式
Hall传感器(霍尔传感器,以下简称Hall)是根据霍尔效应制作的一种磁场传感器.
霍尔效应:当电流垂直于外磁场通过半导体时,载流子发生偏转,垂直于电流和磁场的方向会产生一附加电场,从而在半导体的两端产生电势差,这一现象就是霍尔效应,这个电势差也被称为霍尔电势差.
在BLDC中,一般采用3个开关型Hall测量转子的位置,由其输出的3位二进制编码控制6个MOS管的导通实现换相. 通常,将3个Hall按间隔120°或60°的圆周分布来安装.
1)当N极逐渐靠近Hall即磁感应强度达到一定值时,其输出是导通状态
如下图,转子顺时针旋转时,Hall磁环中NS极中点P1经过b相线圈,b对应Hall输出高电平(逻辑1)
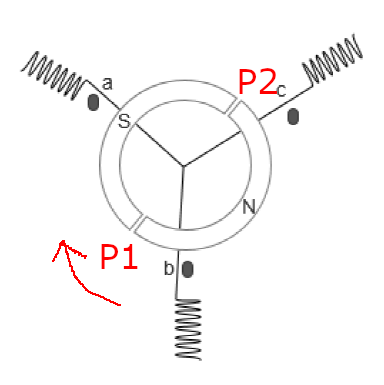
其中,\(P_1,P_2\)分别是磁环的2个\(S, N\)极交界点
2)当N极逐渐离开Hall、磁感应强度逐渐小时,其输出仍然保持导通状态;只有磁场转变为S 极便达到一定值时,其输出才翻转为截止状态.
如下图,转至逆时针旋转时,Hall磁环中NS极中点P1经过b线圈,b对应Hall输出低电平(逻辑0)
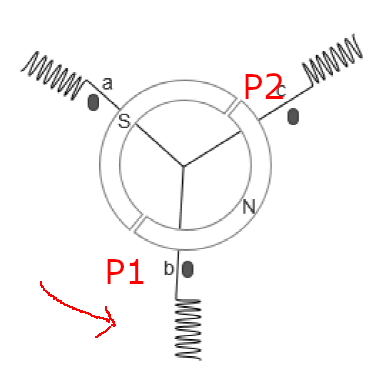
其中,\(P_1,P_2\)分别是磁环的2个\(S, N\)极交界点
在S, N极交替变化下传感器输出波形占高、低电平各占50%(转速稳定). 如果转子是一对极,则电机旋转一周Hall输出一个周期的电压波形;如果转子是两对极,则输出两个周期的波形.
如果3个Hall(a、b、c)按间隔120°来安装,那么3个Hall输出信号分别表示为Ha、Hb、Hc,其波形相位差120°. 对于任一Hall输出信号,其高电平、低电平各占180°. 如果高电平用“1”表示,低电平用“0”表示,那么输出的3个Hall信号可以用3bit的二进制位编码表示,如下图:

在一个周期内,Ha Hb Hc的组合值分别为(6个):101, 100, 110, 010, 011, 001. 为方便描述(与其他文档保持一致),我们将001放在第一个位置,其他后移. 于是,HaHbHc组合值变成:001, 101, 100, 110, 010, 011.
如何根据Hall信号判断旋转方向?
我们研究磁环\(SN\)极交界点(\(P1P2\))经过线圈对应的Hall信号值的先后顺序,从而判断磁环(转子)的旋转方向.
-
逆时针旋转时,\(P2\)先经过a,旋转120°后,再经过b;再旋转120°后,经过c. 于是,我们说Ha超前Hb \(2π/3\)(即120°),Hb超前Hc 120°,Hc超前Ha 120°(或Ha滞后Hc 240°). 此时,\(P2\)经过Hall的顺序:\(a\to b\to c\to a\to ...\)(重复). 与上图Ha, Hb, Hc时序一致.
-
顺时针旋转时,\(P1\)先经过a,旋转120°后,再经过c;再旋转120°后,经过b. 于是,我们说Ha超前Hc 120°,Hc超前Hb120°(或Ha滞后Hb 240°). 此时,\(P1\)经过Hall的顺序:\(a\to c\to b\to a\to ...\)(重复). 与上图Ha,Hb,Hc时序不一致.
转子逆时针旋转一周,a、b、c 3个Hall输出6个不同值组合,每种HaHbHc二进制值组合称为霍尔编码,每个霍尔编码决定了一种转子位置,即六步换相中的某一相. 每个霍尔编码占60°相位角.
逆时针旋转,霍尔编码(HaHbHc)序列:001->101->100->110->010->011;
顺时针旋转,霍尔编码(HaHbHc)序列:001->011->010->110->100->101.
于是,我们可以根据霍尔编码序列,求出电机旋转方向.
而我们根据霍尔编码导通MOS管,就能控制电机持续旋转. 于是,我们建立电机的真值表(电机厂家通常会给出). BLDC电机有2个真值表,分别对应逆时针旋转、顺时针旋转.
电机真值表与Hall和U、V、W相线圈的相对位置有关. 为方便描述,本文从位置上规定:Hall a,b,c分别安装在V相、W相、U相. 于是,用符号可描述为:
逆时针旋转电机真值表:
| 阶段(Step) | Ha | Hb | Hc | A (V相) |
B (W相) |
C (U相) |
U | V | W | 导通的功率管 |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 1 | × | - | + | + | × | - | Q1Q6导通 |
| 2 | 1 | 0 | 1 | + | - | × | × | + | - | Q3Q6导通 |
| 3 | 1 | 0 | 0 | + | × | - | - | + | × | Q3Q2导通 |
| 4 | 1 | 1 | 0 | × | + | - | - | × | + | Q5Q2导通 |
| 5 | 0 | 1 | 0 | - | + | × | × | - | + | Q5Q4导通 |
| 6 | 0 | 1 | 1 | - | × | + | + | - | × | Q1Q4导通 |
其中,\(+\) 代表接通电源+;\(-\)代表接通电源-;\(×\)代表悬空. 例如,\((A,B,C)=(+,-,×)\)时,A对应相的上管导通,B对应相的下管导通,C对应相的上下管截止,其他MOS管截止.
注意:
1)这里step只是自定义表格编号,与程序没有关联.
2)霍尔编码与UVW的真值表与其安装位置强相关,一定不能生搬硬套!实际编程,为简洁起见,可直接参照电机厂家给定真值表.
真值表解析:
Hall信号\(0\to 1\),代表Hall经过磁环\(S\to N\)极,对应相线圈接通+;信号\(1\to 0\),代表Hall经过磁环\(N\to S\)极,对应相线圈接通-.
反过来,当相线圈接通+,如果上一步Hall信号为0,那么当前步Hall信号为1;当相线圈接通-,如果上一步Hall信号为1,那么当前步Hall信号为0.
也就是说,Hall信号为1时,对应相线圈只能是"+"或"×"状态;Hall信号为0时,对应相线圈只能是"-"或者"×"状态.
- step1,从step=6到1,\(HaHbHc: 011\to 001\),即\(Hb: 1\to 0\),表示\(Hall\ B: N\to S\) 此时,B相接通-,A=×,C接通+;
- step2,从step=1到2,\(HaHbHc: 001\to 101\),即\(Ha: 0\to 1\),表示\(Hall\ A: S\to N\). 此时,A相接通+. 谁接通-?只能是B,因为\(Hc=1\),所以C不可能接通-,C=×,所以B接通-;
- step3,从step=2到3,\(HaHbHc: 101\to 100\),即\(Hc: 1\to 0\),表示\(Hall\ C: N\to S\). 此时,C相接通-. 谁接通+?只能是A,因为\(Hb=0\),所以B不可能接通+,B=×;
- step4,从step=3到4,\(HaHbHc: 100\to 110\),即\(Hb: 0\to 1\),表示\(Hall\ B: S\to N\). 此时,B相接通+,A=×,C接通-;
- step5,从step=4到5,\(HaHbHc: 110\to 010\),即\(Ha: 1\to 0\),表示\(Hall\ A: N\to S\). 此时,A相接通-,B接通+,C=×;
- step6, 从step=5到6,\(HaHbHc: 010\to 011\),即\(Hc: 0\to 1\),表示\(Hall\ C: S\to N\). 此时,C相接通+,A接通-,B=×,;
因此,逆时针旋转时,step变化:\(1\to 2\to 3\to 4\to 5\to 6\),霍尔编码(HaHbHc)变化:\(001\to 101 \to 100 \to 110 \to 010 \to 011\)
注意:
- 六步换相法中,每个阶段有且仅有一个上桥臂和一个下桥臂同时导通,且同一组上下桥臂(Q1Q2,Q3Q4,Q5Q6)无法同时导通,否则电源短路.
如何得到转子顺时针旋转的真值表?
根据六步换相小节分析可知,需要在逆时针旋转基础上,将接通相电压的顺序反过来.
于是,可以得到,
顺时针旋转电机真值表:
| 阶段(Step) | Ha | Hb | Hc | A (V相) |
B (W相) |
C (U相) |
U | V | W | 导通的功率管 |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 1 | × | + | - | - | × | + | Q5Q2导通 |
| 2 | 1 | 0 | 1 | - | + | × | × | - | + | Q5Q4导通 |
| 3 | 1 | 0 | 0 | - | × | + | + | - | × | Q1Q4导通 |
| 4 | 1 | 1 | 0 | × | - | + | + | × | - | Q1Q6导通 |
| 5 | 0 | 1 | 0 | + | - | × | × | + | - | Q3Q6导通 |
| 6 | 0 | 1 | 1 | + | × | - | - | + | × | Q3Q2导通 |
注意两种特殊情况,需要避免:
1)当按真值表霍尔编码导通MOS管后,如果保持导通状态不变,电机就会旋转到对应位置不变,此时电路电能只能转换为热能,不能转换为机械能(动能),而电机绕组是铜线,内阻很小,电流就会非常大,这将会产生大量的热,从而导致电源或电机损坏;
2)三相六臂全桥驱动电路原理图,如果同时导通同一组上下桥臂,如Q1Q2,Q3Q4,或者Q5Q6,就会导致电机被短路,MOS管直接接通电源,从而烧毁电源或MOS管.
看实际案例. 下表是BLDC厂家给出的57BL75S10-230TF9真值表:

其中,相线输出中,\(×\) 代表悬空,\(1\) 代表接通电源+,\(0\) 代表接通-.
为什么电机厂家提供的真值表跟我们上面推导的不一样?
仔细看电机规格书,可以发现,U、V、W三相绕组的接法跟我们前面原理图不同. 我们前面原理图UVW三相接线顺序:a(V), b(W), c(U),而电机厂家UVW三相接线顺序:U、V、W. 另外,还有Hall安装位置未明确. 因此,真值表肯定不同.

驱动电路设计、分析
下面以野火的无刷直流电机驱动板为例,进行分析. 如果电路不同,可不必参考.
参考电路图:ebf_brushless motordriver_20201020_原理图.pdf.
驱动电路主要包括:电源电路,电源检测电路,输入信号隔离电路,3个相桥(U相桥、V相桥、W相桥)电路,相电流采集电路,传感器电路(编码器/Hall传感器)
输入信号隔离电路
MCU对BDLC驱动电路的输入信号主要包括:3相PWM信号(U相、V相、W相)、SD信号.
PWM控制信号使用高速光电耦合器TLP2362 进行了隔离,SD信号(IC使能)使用光电耦合EL357N 光耦进行了隔离.
- Motor_U+, Motor_U-: MCU输出,用于控制电机U相桥
- Motor_V+, Motor_V-: MCU输出,用于控制电机V相桥
- Motor_W+, Motor_W-: MCU输出,用于控制电机W相桥
- Motor_SD_A:MCU输出,与Motor_SD_B一起,共同控制SD信号Motor_SD_IN
- Motor_SD_B:相电流过流保护电路输出信号,与Motor_SD_A一起,控制驱动IC IR2110STRPBF的SD使能引脚. 只有Motor_SD_A,Motor_SD_B都是高电平时,驱动IC才不会被被关断.

3相桥驱动电路
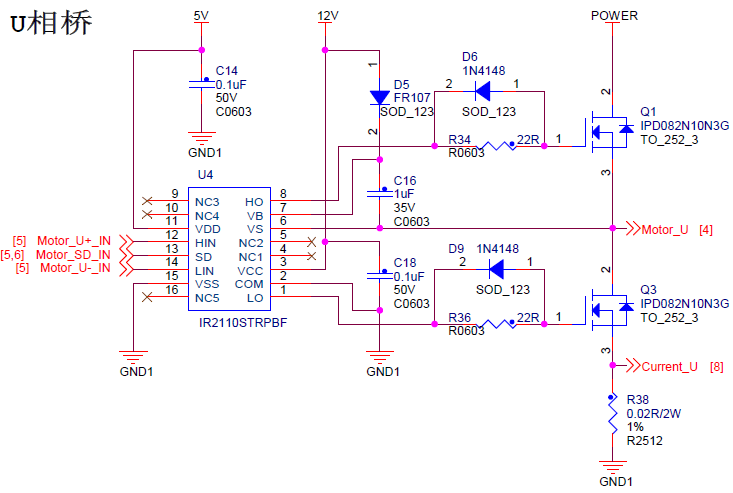
以U相桥为例,如下图,MCU控制IC IR2110STRPBF驱动MOS管Q1、Q3.
MCU输入端:
- Motor_U+_IN:高边(HO)逻辑输入,控制HO输出
- Motor_U-_IN:低边(LO)逻辑输入,控制LO输出
- Motor_SD_IN:IC使能引脚,高电平有效,触发HO、LO输出电平
- HO:控制MOS管Q1导通 or 截止
- LO:控制MOS管Q2导通 or 截止
- Motor_U:连接电机U相绕组,用于驱动电机旋转
- Current_U:用于检测反馈电流,电压值为采集电阻R38(0.02R/2W)两端电压
3相电压采集
3相桥电路中,Motor_U是U相电压,MCU如何得知每一相的相电压呢?
可利用相电压采集电路,ADC采集. 以U相电压为例,
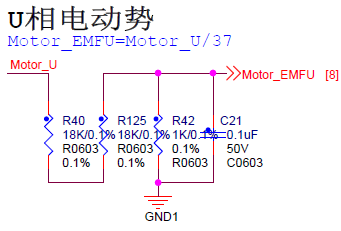
电机在旋转时,可能会产生一些尖峰电压,因此MCU并不能直接采集. 我们用AMC1311DWVR实现高精度的模拟信号采集和电气隔离.
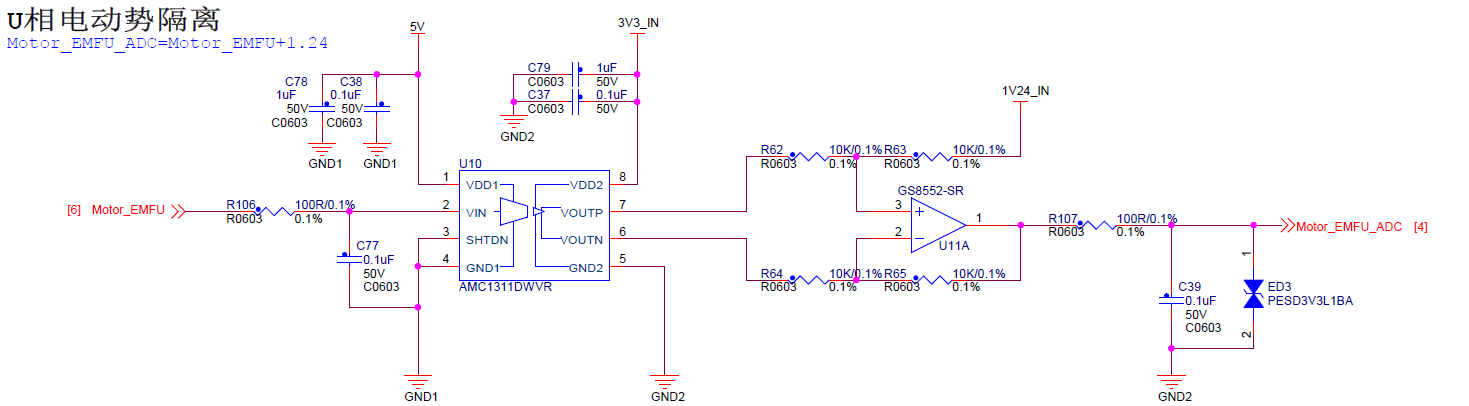
其中,运放放大倍数为8
于是,可得,(详细推导过程,可参见下文3相电流采样)
问题:为什么不用相电压,计算相电流?
因为相电压不仅转化为电能,还有一部分转换为转化为动能,不能对相电压简单应用欧姆定律求相电流. 而采样电流,采集的是采样电阻的两端电压,采样电阻是纯电阻,符合欧姆定律.
3相电流采样电路
在3相桥电路中,我们看到了相电流采集端口Current_U. 这里,相电流采集采用三电阻法.
以U相电流检测为例,采样电阻0.02Ω、2W,电流信号I_U转换成了电压信号Current_U,再经过放大8倍后差分输出,使用普通运放将差分输出转换成单端输出给STM32 ADC采样通道Motor_IU_ADC.
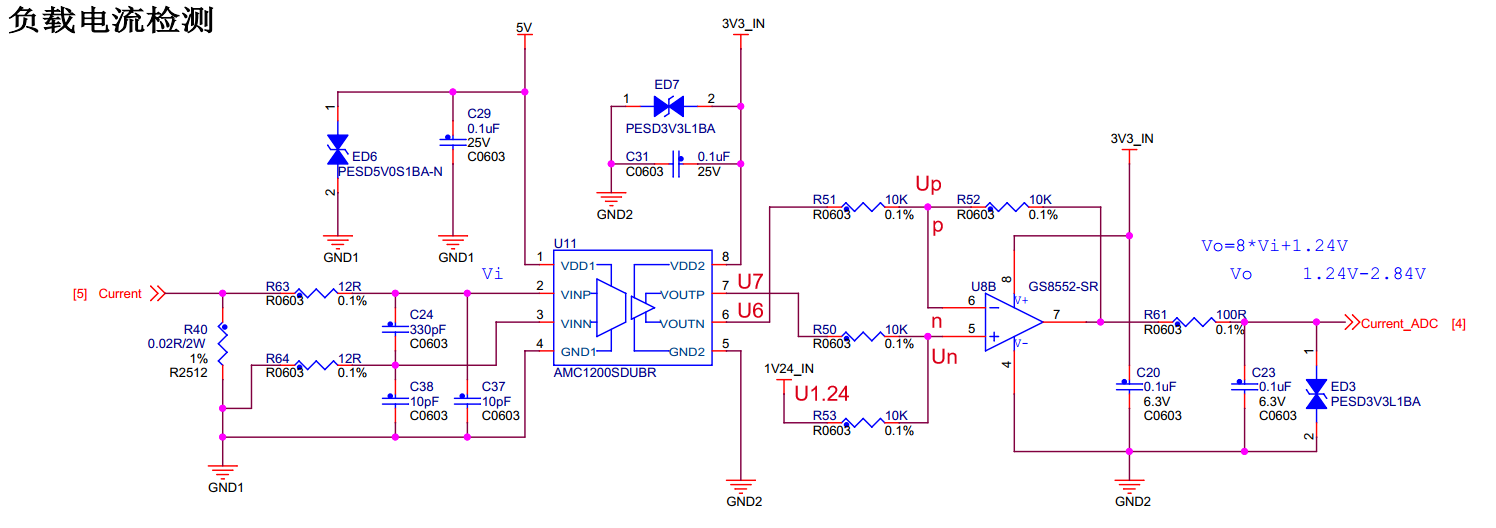
分析上图运算放大器,这是负反馈电路,根据虚短、虚断,知\(U_p=U_n\),p、n点之间无电流到运放6、5引脚,于是,由欧姆定律,
R61与后面滤波电容C23组成RC滤波电路,而R61流过电流很小,压降很小,所以可认为\(V_o=V_{current\_adc}\)
将上面2个式子化简,
∵隔离运放将\(V_i=V_{inp}-V_{inn}=Current\_U\)(即上图Current)放大8倍后输出
∴\(U_7-U_6 = 8 * V_i\)
∴\(V_o=8*V_i + U_{1.24} = 8*V_i+1.24V=V_{current\_adc}\)
∴U相采样电压:\(Current\_U=\frac{1}{8}(V_{current\_adc}-1.24)[V]\)
∴U相采样电流(采样电阻0.02Ω,2W):\(I_U=Current\_U/0.02Ω\)
电源电压检测
电源电源采集电路,用AMC1311DWVR对ADC采样电路进行隔离,运放GS8552-SR放大倍数是8.

同3相电流采样计算,
有,
过流保护
使用电压比较器LMV331SE 实现10A相电流的过流保护. 下面看如何实现过流保护逻辑. 过流保护电路有多个版本,我们注意看目前最新的20240910版,以及旧的20201020版.
- 20240910版

from EBF410194V1R1_SCH_20240910_原理图.pdf
电压比较器逻辑:IN+ 电压 > IN-,则输出高电平;反之,输出低电平.
以U相为例,
正常情况下:Motor_IU_ADC采集电压 < R86,R87的分压值2V84_IN,通过比较器U19输出高电平3.3V;U33 pin3(IN-)处于高电平3.3V > R142,R143分压值(IN+ = 3V3_IN/2),通过比较器U33输出低电平0V,则Q8处于截止状态,于是C99两端电压3.3V;U34比较器pin 1(IN+) = 3.3V > pin 3 (IN-) = 1.65V,所以U34输出高电平3.3V,即 Motor_SD_B = 3.3V;此时,PNP三极管Q7 SS8550截止,于是过流指示灯不亮.
此时,Motor_SD_B = H
即时短时间Motor_IU_ADC > R86,R87的分压值2V84_IN,也不会触发过流保护. 这是因为,比较器U19输出低电平0V,通过R133、R134、C33器件RC充放电作用,U33 pin3电压依然 > R142,R143分压值(3V3_IN/2),那么U33会输出低电平0V,从而Q8截止.
过流保护时:Motor_IU_ADC > R86,R87的分压值2V84_IN,比较器U19输出0V;比较器U33输出高电平,则Q8导通;比较器U34输出低电平0V,即 Motor_SD_B = 0V;Q7导通,过流指示灯LED3 LED0603点亮,表示相线圈处于过流状态.
此时,Motor_SD_B = L

前面输入信号隔离时,有讲过,Motor_SD_A,Motor_SD_B共同作用于驱动IC IR2110STRPBF的SD引脚,即Motor_SD_IN = NOT (Motor_SD_A AND Motor_SD_B)(注意这里的Motor_SD_IN输出电路有反相作用).
与门U22输入输出与MOS管状态真值表:
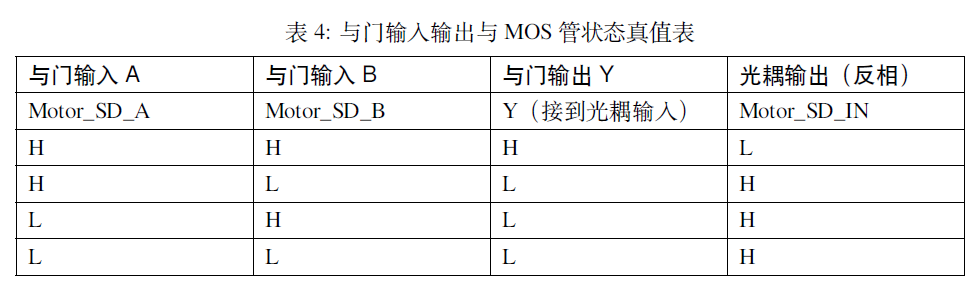
其中,驱动IC IR2110STRPBF的SD pin直连Motor_SD_IN. 只有SD低电平(L)时,驱动IC才能正常工作;否则,关闭,HO、LO停止输出PWM信号驱动MOS管,从而电机停止旋转.
驱动IC IR2110STRPBF的SD引脚定义:
SD: 关断输入(低电平有效,接高电平时整个芯片停止工作,用于保护)
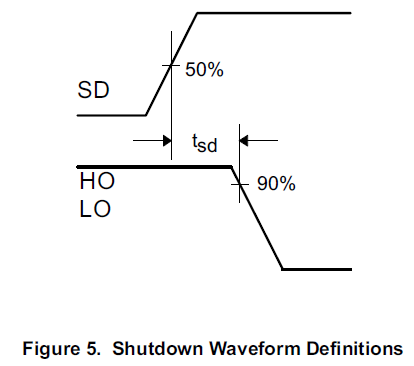
from 驱动IC IR2110STRPBF datasheet IR2110STRPBF_2014-09-06.PDF
- 20201020版
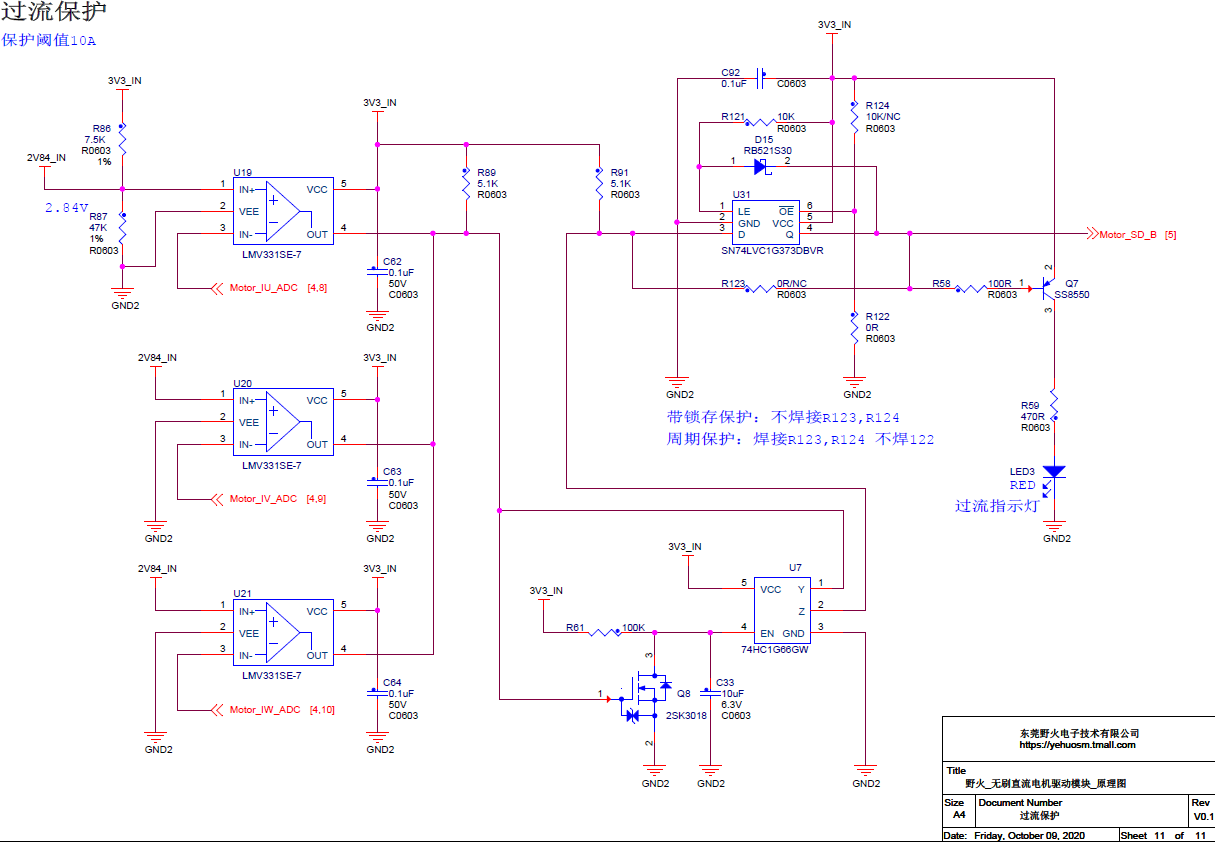
from ebf_brushless motordriver_20201020_原理图.pdf
对于旧版过流保护电路,
正常情况下:Motor_IU_ADC < 2V84_IN,比较器U19输出高电平到Q8 NPN-MOS和U7 74HC1G66GW(模拟开关)的Y端口;此时,Q8导通,U7的EN端口接地,即接入低电平,所以模拟开关关闭,Y、Z端口断开;而3V3_IN对锁存器U31的D端口有上拉作用,所以D为高电平,U31输出Q=D=高电平,所以Motor_SD_B=H
过流保护时:Motor_IU_ADC > 2V84_IN,比较器U19输出低电平到Q8 NPN-MOS和U7 74HC1G66GW(模拟开关)的Y端口;此时,Q8截止,U7的EN端口接高电平,所以模拟开关使能,Y、Z端口内部连接;U19低电平也会输入U7的Y端口,所以Z端口输出低电平到锁存器U31 D端口,而U31输出Q=D=低电平,所以Motor_SD_B=L
综上,正常情况下、过流保护时,Motor_SD_B的逻辑电平与新版过流保护电路一致.
速度控制原理
数学模型
BLDC的数学模型:
其中,
- \(ω\) 电机的转速
- \(U_a\) 电机定子绕组的实际电压大小
- \(I_a\) 电机绕组内通过的实际电流大小
- \(R_a\) 电路系统中包含电机的回路电阻大小
- \(K_e\) 电势系数
- \(φ\) 励磁磁通
参考:P442 美 菲茨杰拉德 A.E.等. 电机学:第六版. 电子工业出版社, 2004.
想要改变电机转速,就必须对3个参量修改:
1)电枢回路的总电阻Ra
2)电枢绕组的供电电压Ua
3)励磁磁通\(φ\)
现实情况下,如果已经选定直流电机及其参数,那么修改总电阻Ra、励磁磁通\(φ\)就很难. 通常,我们只能改变供电电压Ua. 从而控制转速.
同直流有刷电机,BLDC也能通过PWM进行速度控制,频率通常为十几Hz~几十KHz(< MOS管开关频率).
PWM调制方式
PWM控制BLDC有5种调制方式:
1)PWM-ON:在 120° 导通区间,各开关管前 60° 采用 PWM 调制,后 60° 则恒通. 换相脉动转矩最小,非换相相电流脉动最小;
2)ON-PWM:在 120° 导通区间,各开关管前 60° 恒通,后 60° 则采用 PWM 调制. 换相脉动转矩和非换相相电流 > PWM-ON型;
3)H_PWM-L_ON:在 120° 导通区间,上桥臂开关管采用 PWM 调制,下桥臂恒通. 上桥臂换相时换相脉动转矩和电流脉动与PWM-ON 型相同,下桥臂换相时换相脉动转矩和电流脉动与ON-PWM 型相同;
4)H_ON-L_PWM:在 120° 导通区间,上桥臂开关管恒通,下桥臂采用 PWM 调制. 下桥臂换相时换相脉动转矩与PWM-ON 型相同. 上桥臂换相时换相脉动转矩与ON-PWM 型相同(情况与H_PWM-L_ON相反)
5)H_PWM-L_PWM:在 120° 导通区间,上、下桥臂均采用 PWM 调制. 换相脉动转矩最大,非换相电流也最大.
为编程方便,我们通常使用3、5.
5种PWM策略如下图所示:

综上,控制电机转速,转化成控制PWM占空比(或频率)了. 而要控制电机转速到某一目标值,这就是控制工程内容,工业常用PID调速.
参考
美 菲茨杰拉德 A.E,美 Fitzgerald A.E,美 金斯利 C,等.电机学:第六版[M].电子工业出版社,2004.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号