AUTOSAR笔记:模式管理
模式管理是什么?
BSW层中,当满足一些规则(Rules)时,执行相应动作(Action),这就是模式管理.
每个ECU功能不太一样,底层BSW需根据应用需求做出相应实时调整,这个调整动作,我们称为 Action ;什么时候调整,我们称为 Rules.
例如,我们有个信号需要发送给别的ECU,目前有2路CAN:CAN BUS1,CAN BUS2. 信号是交替发送到2个总线上,即第一次发送到CAN BUS1,第二次发送到CAN BUS2.
此时,可用到模式管理:应用层在发送之前,发送该信号给Manager模块,Manager模块会根据应用层发送过来的信息,通过Rules判断是否需要进行模式变更(即执行相应Action),然后根据Action调用其他模块的一些动作,切换bus.
app request info -> manager - rules - | -> action1 -> bus1
| -> action2 -> bus2
常用概念:
-
Mechanisms for notification: 通知机制. 比如,模式切换时发出通知,告诉我们需要被通知的地方,如某个应用层的SWC模式切换了
-
Service requests for mode changes:应用层可主动请求一个模式切换
-
Mode arbitration:模式仲裁. 判断当前状态是否满足Rules,是否需要进行模式切换
-
Mode control:模式控制. 执行相应Action.
BswM
模式管理中,经常需要用到BswM、EcuM,ComM有时也会用到.
概述
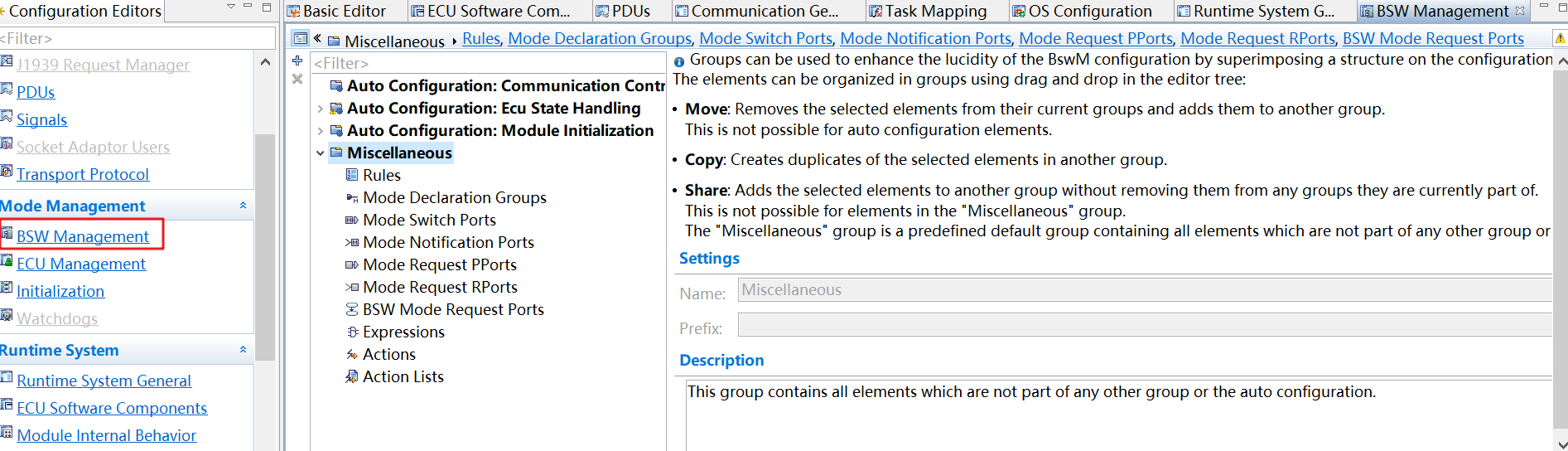
BswM是一个基于Rules的服务模块,主要工作:根据Rules,执行相应Action.
BswM有3个Auto Configuration,是Davinci自动配置;有1个Miscellaneous 是用户自定义(通常不需要自定义).
from ref. [1]
对Rules的评估,有两种形式:立即、延迟
- 立即:被call后,立马开始执行
- 延迟:被call后,需要执行到
BswM_MainFunction()时,才开始执行,因此有延迟
BswM执行流程
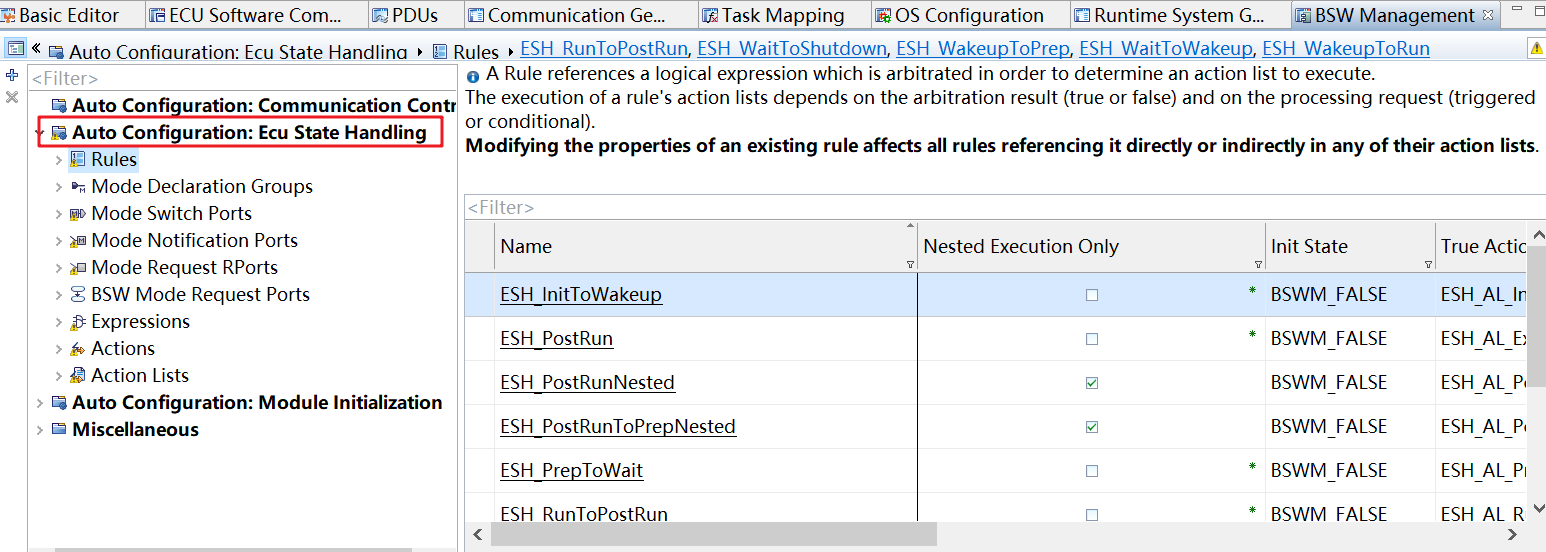
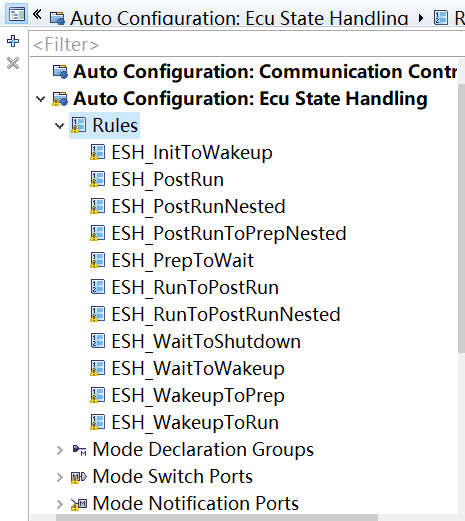
以Ecu State Handling 中的InitToWakeup为例,
from ref. [1]
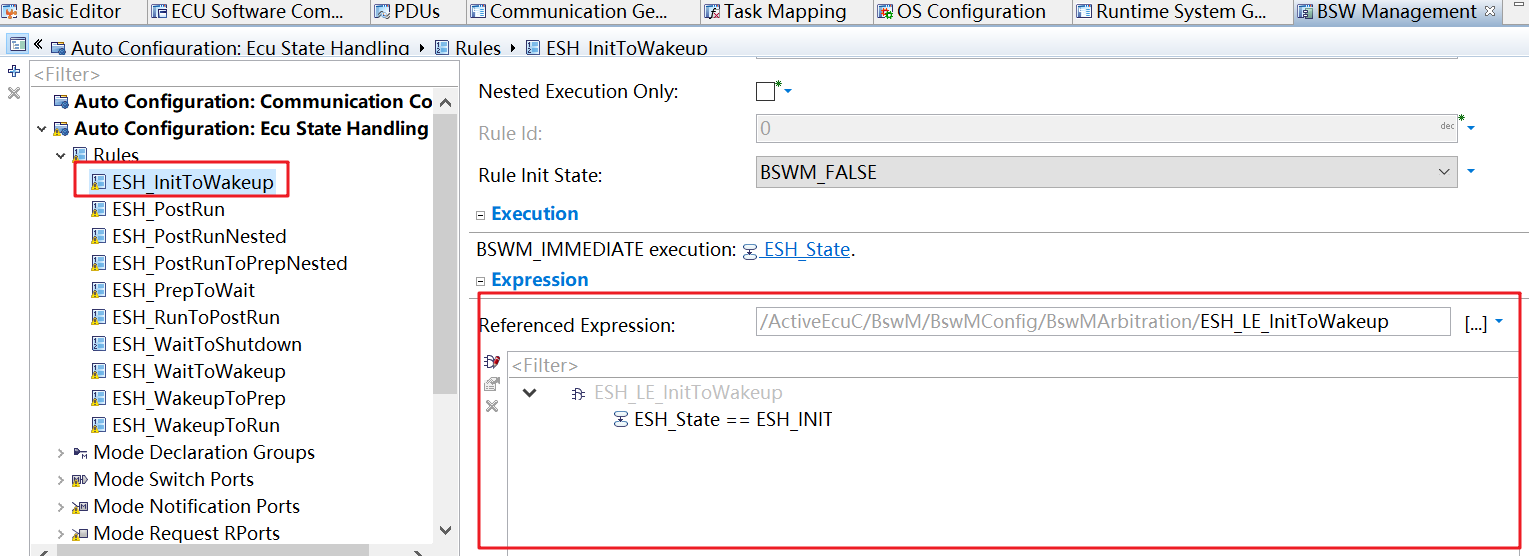
- Rules中,可看到ESH_InitToWakeup规则,该规则需要一个表达式(Expressions),可在下面的Expressions中找到定义,也可以在下面红色方框内找到
当 ESH_State == ESH_INIT 时,即ECU处于初始化状态,也就满足了Rules条件
from ref. [1]
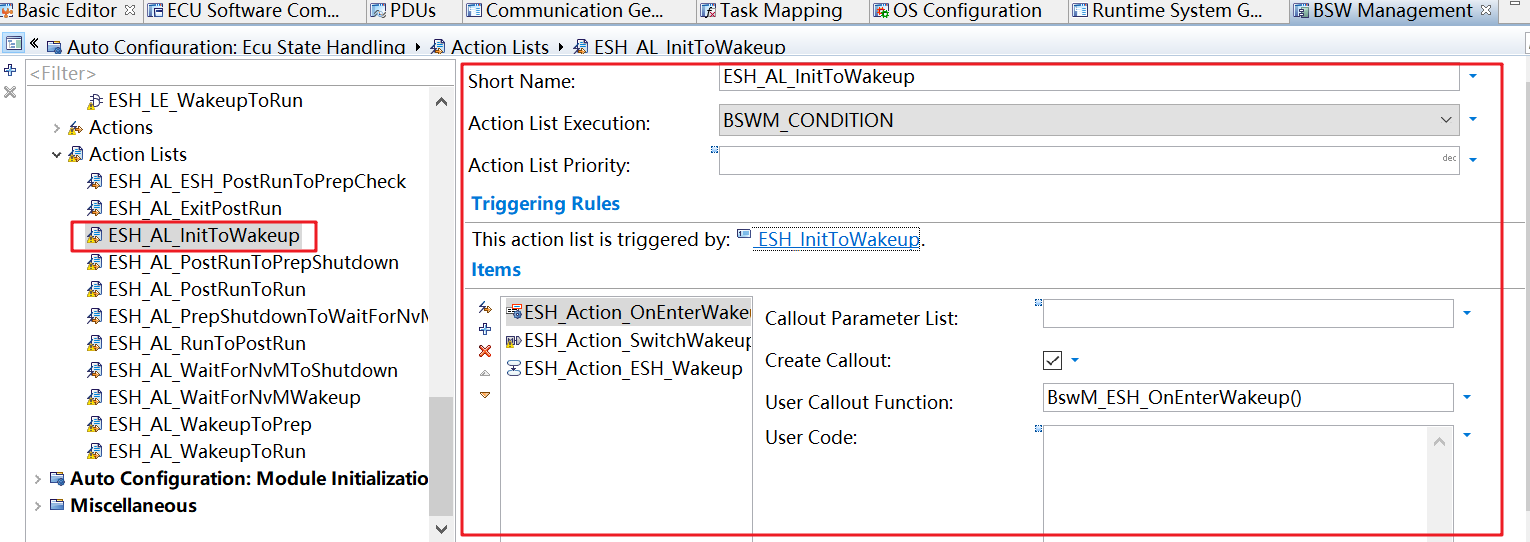
- Rules下面,规则(Rules对应表达式)判断为真时,执行Action List(几个Action集合体).
可以看出该Action List下,有3个Action:
from ref. [1]
- 至此,BswM工作已完成,后面需要被调用的BswM模块响应模式切换
EcuM
EcuM有2类定义:Flexible(灵活的),Fixed(固定的). 通常,使用Flexible,而Fixed一般会用在AUTOSAR 3.x上.
EcuM用于管理Ecu状态,Ecu状态一般是OFF, UP, SLEEP. 在这些大状态之间,又细分了很多小状态,如UP时,需要初始化BSW、OS、RTE等,对事件唤醒的处理.
EcuM主要用来管理EcuM的上下电、睡眠模式,与硬件/低功耗相关.
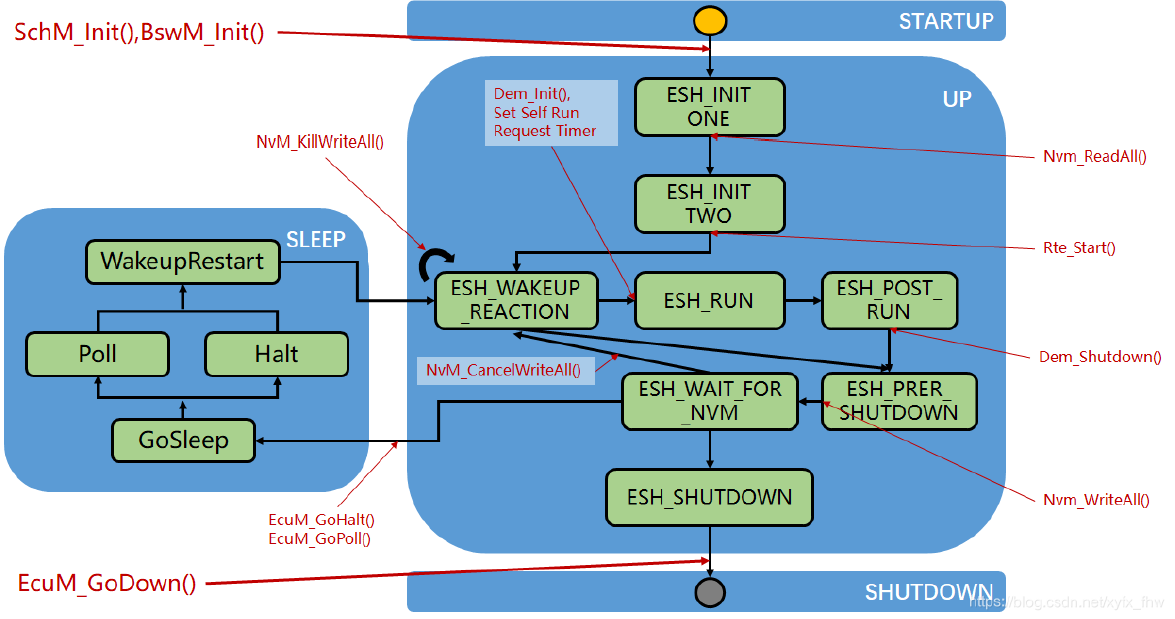
上下电流程
from ref. [1]
上电

from ref. [1]
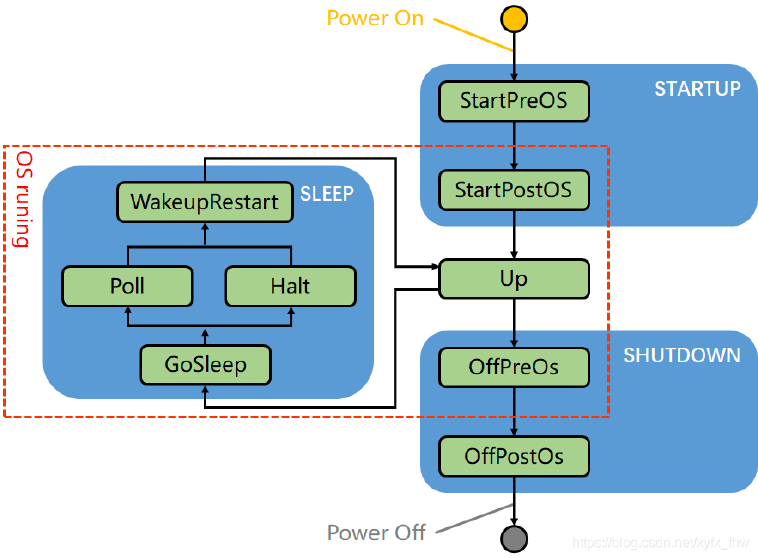
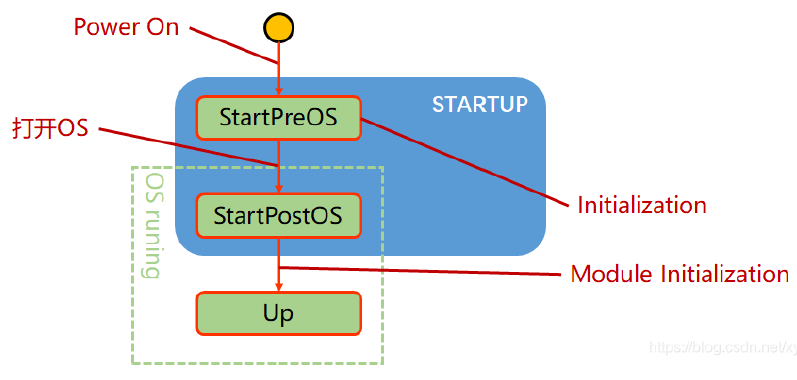
上电与下电对应. 上电(Startup)主要分为4个阶段:
-
上电(MCU启动流程):由cstart.c引导代码,引导cpu跳入
main()函数;然后,在main中做OS初始化准备(此时尚未启动OS,只是初始化); -
预启动OS:进入
EcuM_Init,做一些Error判断,然后启动OS; -
启动OS后:进入一个Task中,称为Init Task,会调用
EcuM_StartupTwo(),执行SchM、BswM的初始化,并且通过BswM可将ADC、PORT等底层的驱动模块初始化 -
启动BswM后:启动BswM后,完成Startup阶段,然后进入
Rte_Start(),再进入UP阶段,即可以正常运行了
上电时序如下图所示:
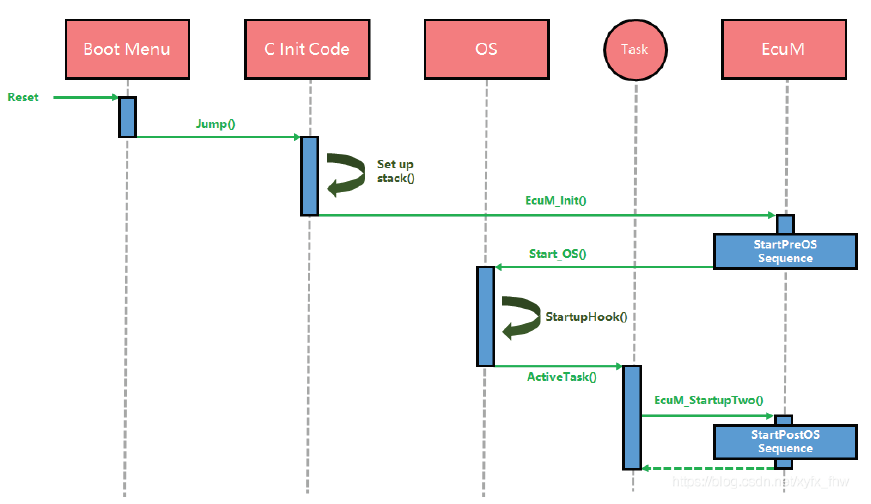
from ref. [1]
下电
from ref. [1]
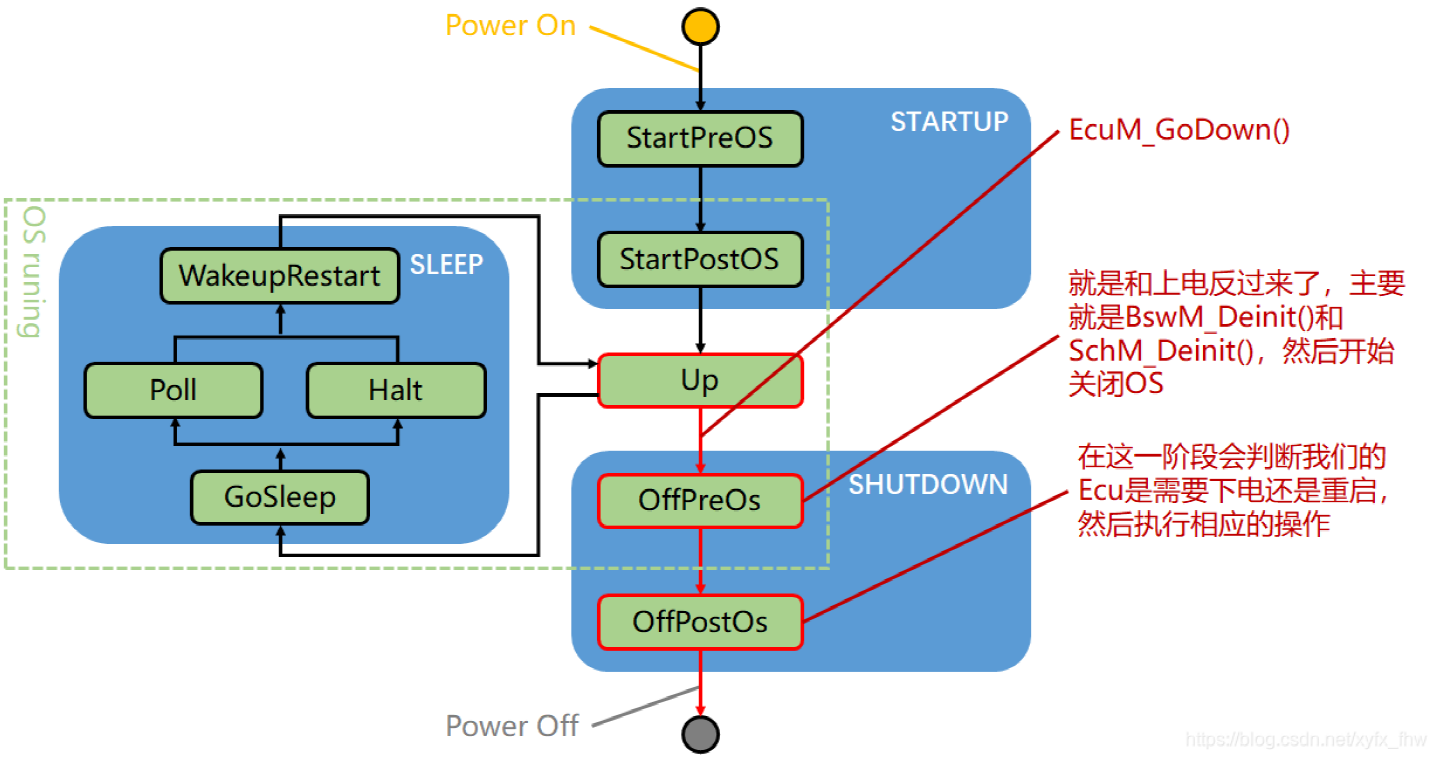
下电(shutdown) 也分为4个阶段:
-
BswM通知EcuM下电:调用关键函数
EcuM_GoDown()后,就进入EcuM下电流程 -
预关闭OS:做Deinit操作,然后进行下电设置,最后关闭OS
-
关闭OS:调用
ShutDownHook(),让用户处理关闭OS的一些定制工作 -
关闭OS之后:根据不同下电需求(关机 or 重启),进入不同操作
下电时序如下图所示:
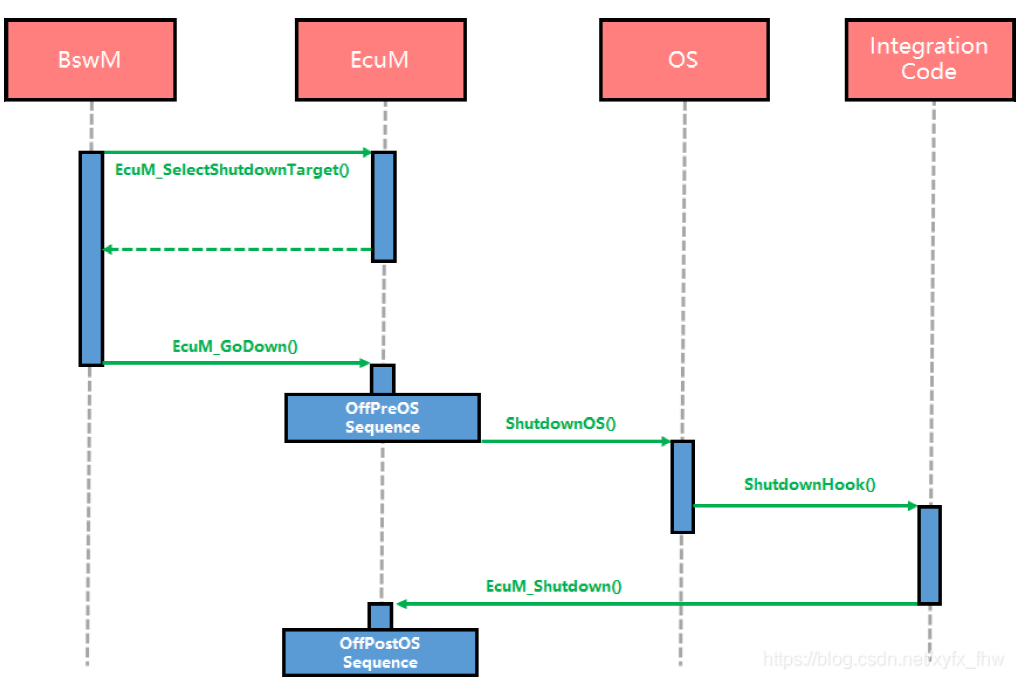
from ref. [1]
睡眠
工作在OFF挡电的ECU,需要进入睡眠模式,为了节省功耗.
睡眠(Sleep)有两种模式:Poll(轮训), Halt(停止). 睡眠与唤醒对应.
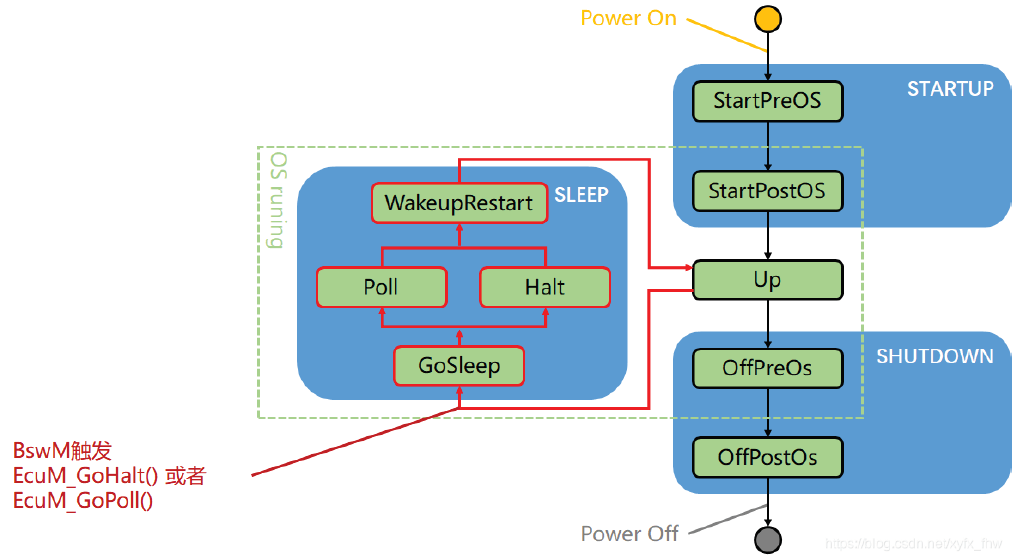
from ref. [1]
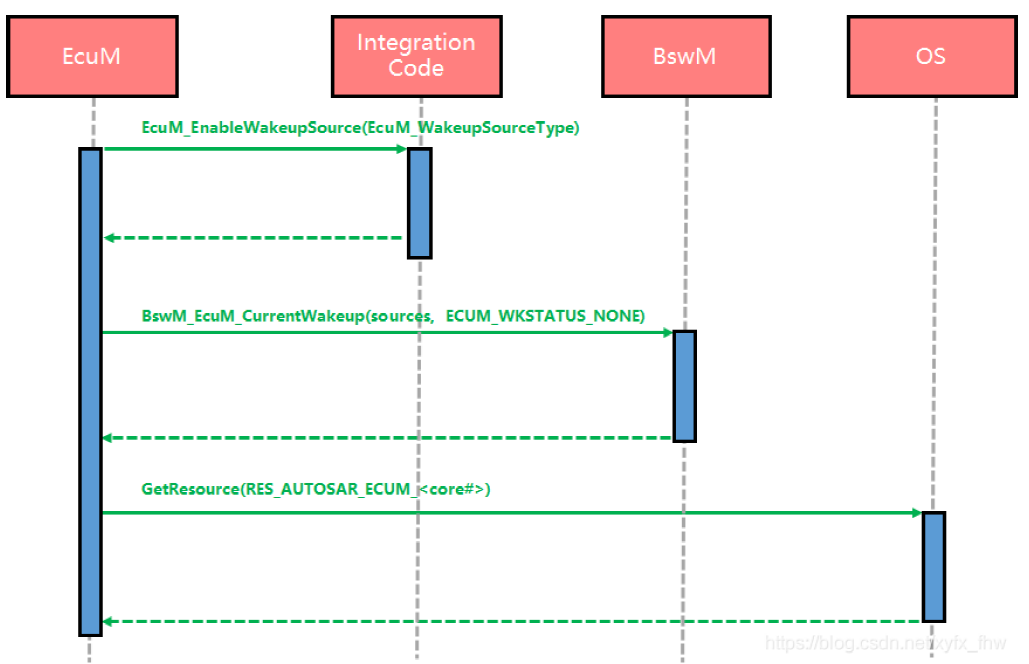
睡眠与唤醒:
- 准备睡眠(GoSleep):先使能唤醒,然后指定唤醒源当前的状态,最后GetResource,之后由EcuM接管.
时序如下:
- 进入睡眠:睡眠有2种模式:
- Poll模式:先设置MCU状态
Mcu_SetMode(ECUM_SLEEP...),然后执行EcuM_Mainfunction,进入后激活唤醒源,然后不断检查是否被唤醒 - Halt模式:先设置Global Suspend,然后生成Ram Hash,接着设置MCU状态
Mcu_SetMode(ECUM_HALT...),然后Global Restore使得全局恢复. 如果在Halt下想要唤醒,需检查Ram Hash
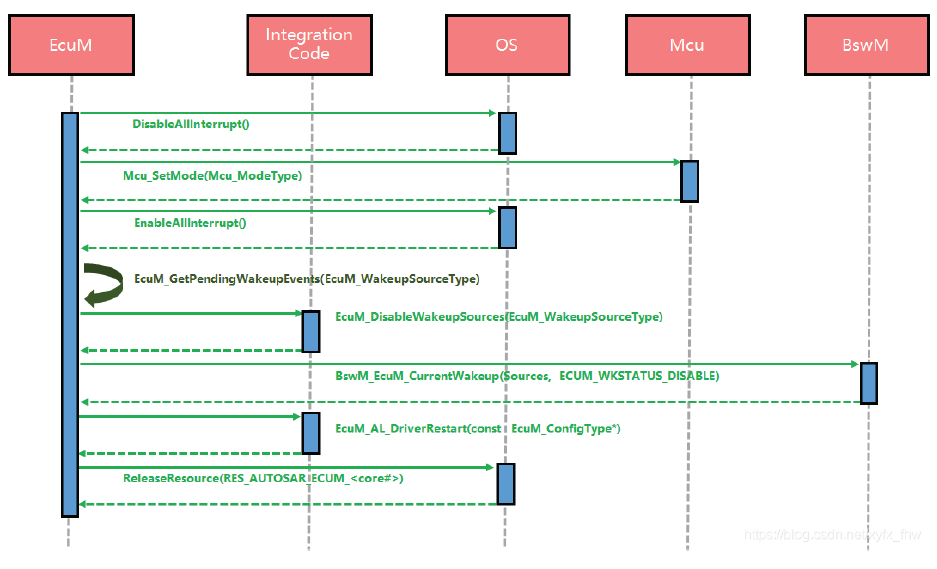
- 唤醒:先设置Mcu状态
Mcu_SetMode(ECUM_NORMAL...),然后禁止唤醒源,接着重启各类底层驱动,最后ReleaseResource,唤醒后由BswM接管.
时序如下:
BswM配置
通常,BswM自动配置足以,少数时候需要手动配置.
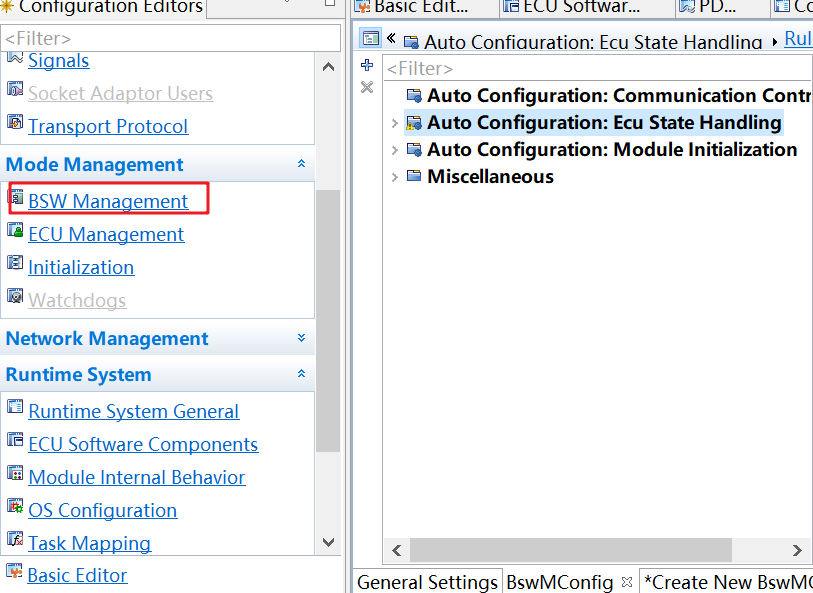
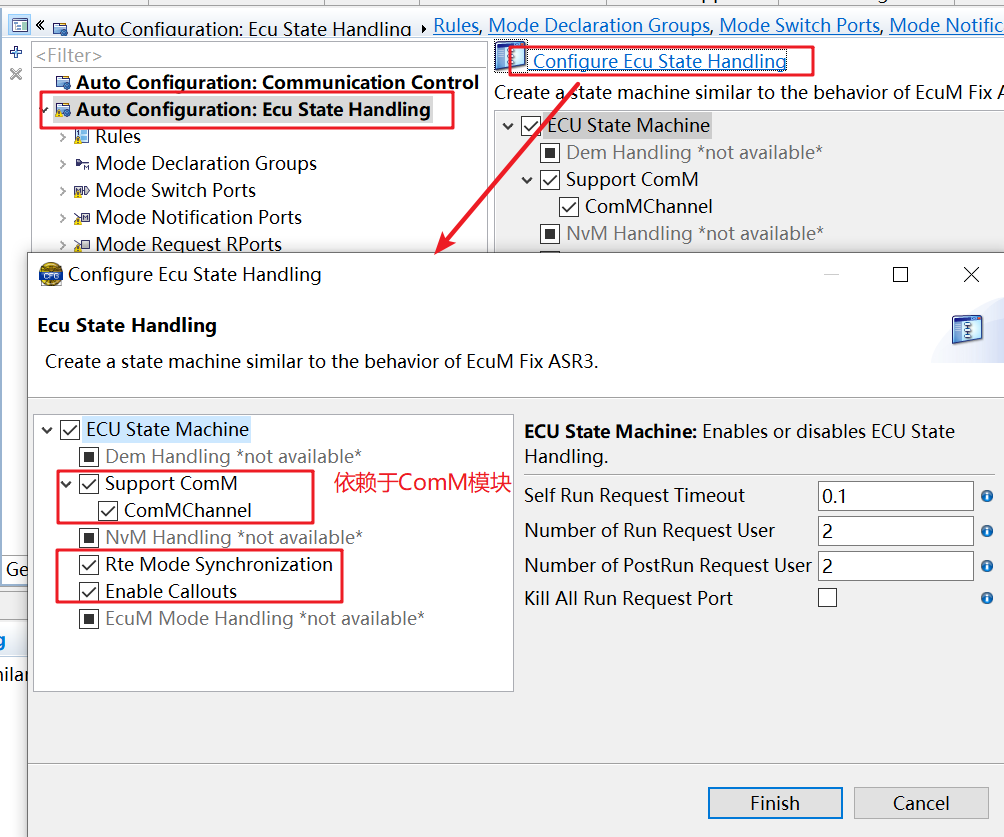
Ecu State Handling(ESH)
上电 UP流程:
Cfg会自动配置这些Rules、Action:
我们只需要勾上ESH中需要用到的选项即可. 勾选方式:
Module Initialization
OS启动后,在初始化BswM之后,由BswM对所有BSW中可管控模块进行初始化. 因此,Port、Dio等模块初始化,可以在这里配置勾选:
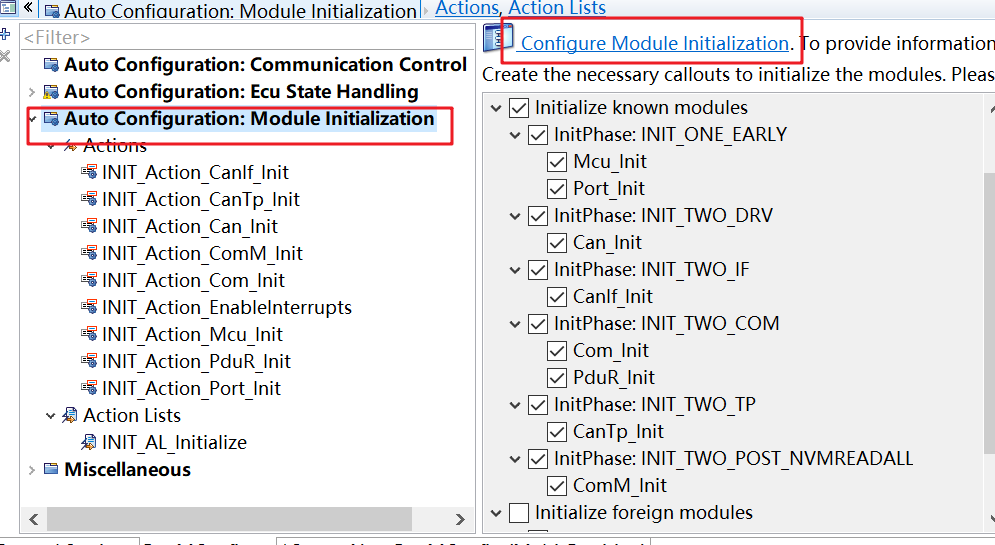
程序执行到 Module Initialization时,会自动调用Action Lists,如下图:
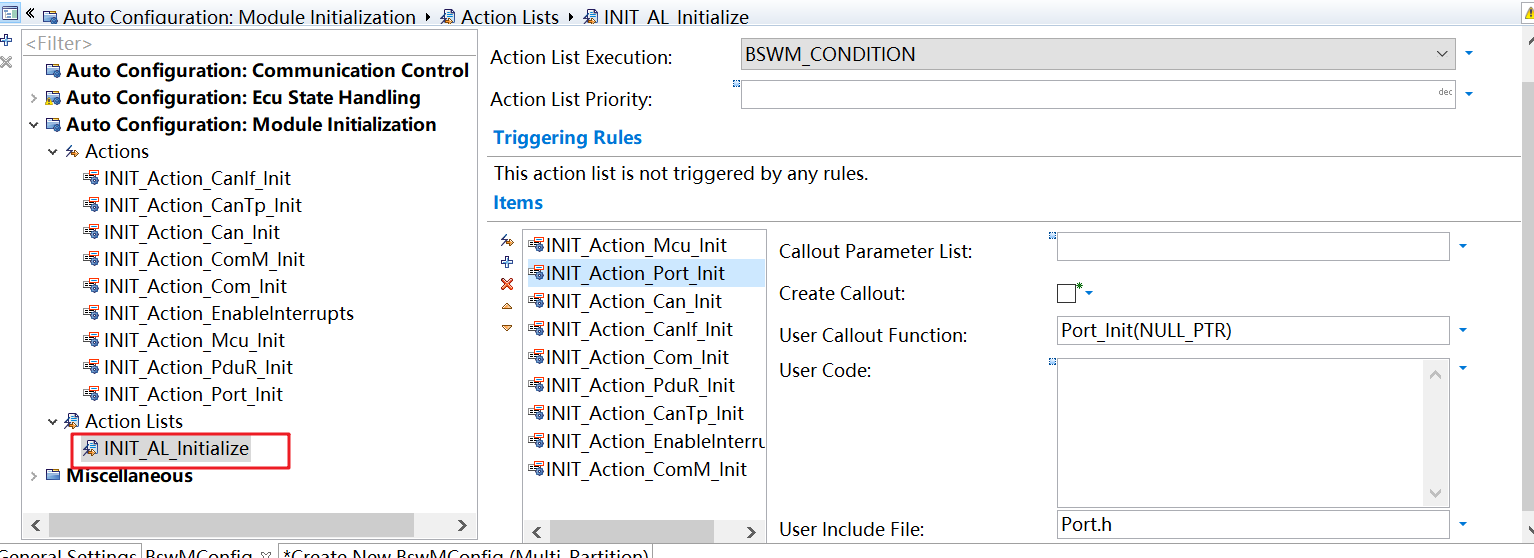
Action Lists可由用户配置,也可以调整顺序. 右边的User Code,用户可以添加C代码、include文件,会在生成代码时,加进去.
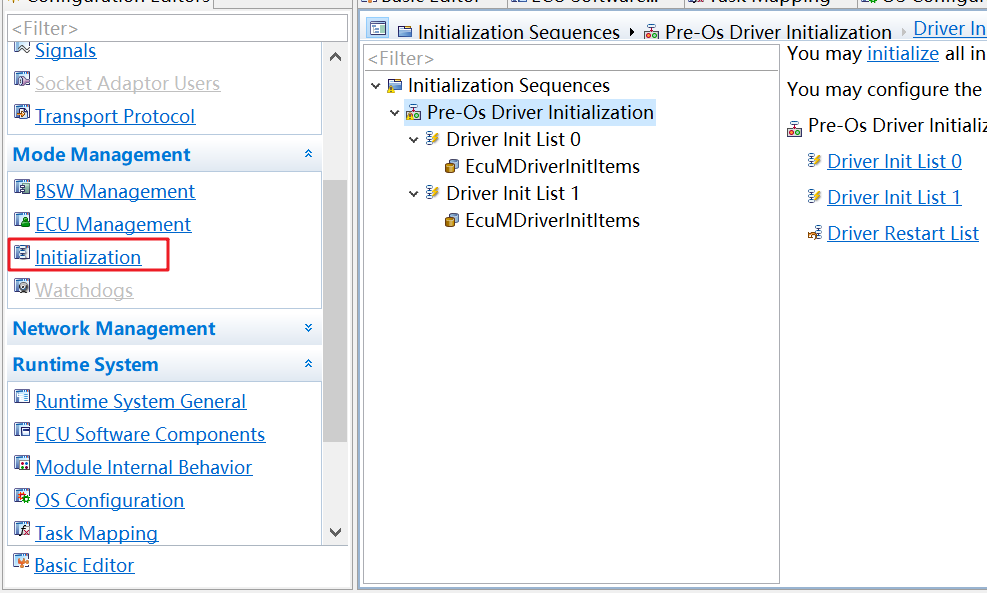
Module Initialization 与 Initialization 区别:
-
Module Initialization: OS启动后,BswM初始化各BSW模块时,使用的初始化流程. OS启动后,进入Init Task,会在Task中初始化BswM和BSW各模块
-
Initialization: OS启动前,初始化一些运行OS必要的初始化配置,一般是初始化Memory(Driver Init List 0);还有一些底层驱动模块,如MCU模块、DIO模块、PORT模块等驱动,也可以放在这里(Driver Init List 1).
Communication Control
依赖于EcuC> EcucPduCollection(如果没有,需要右键添加)
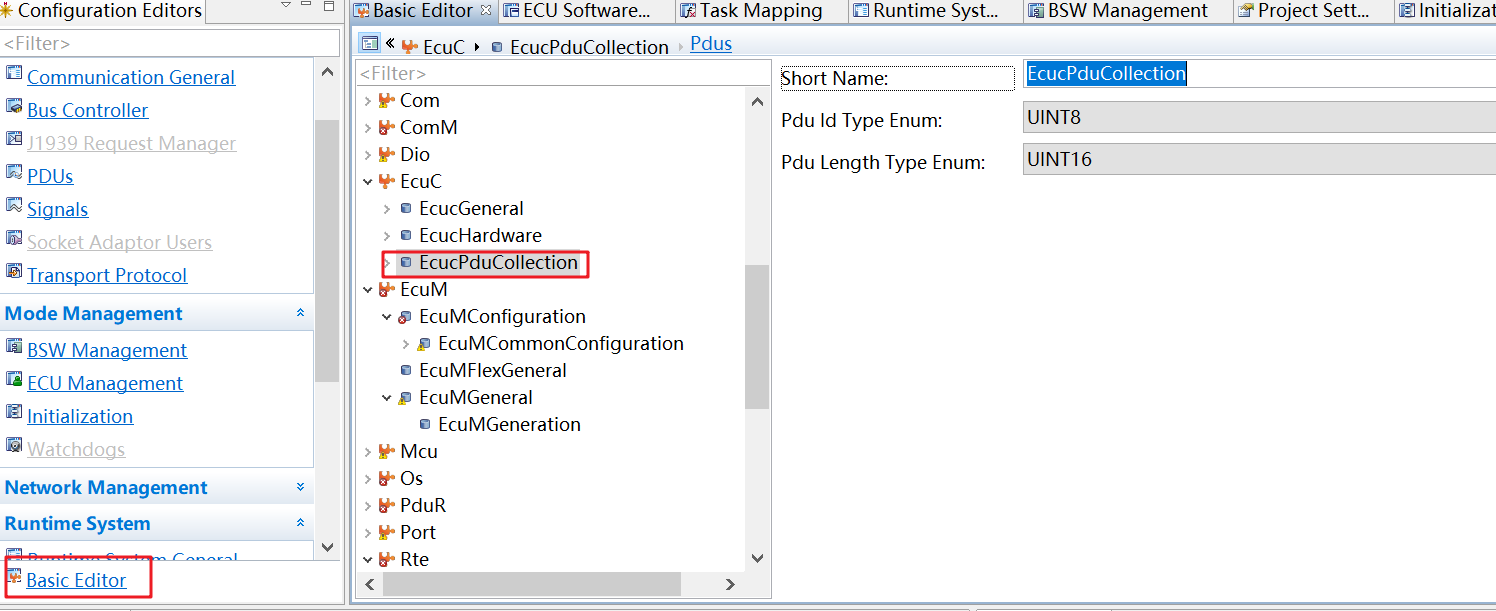
在这里勾选需要配置的模块
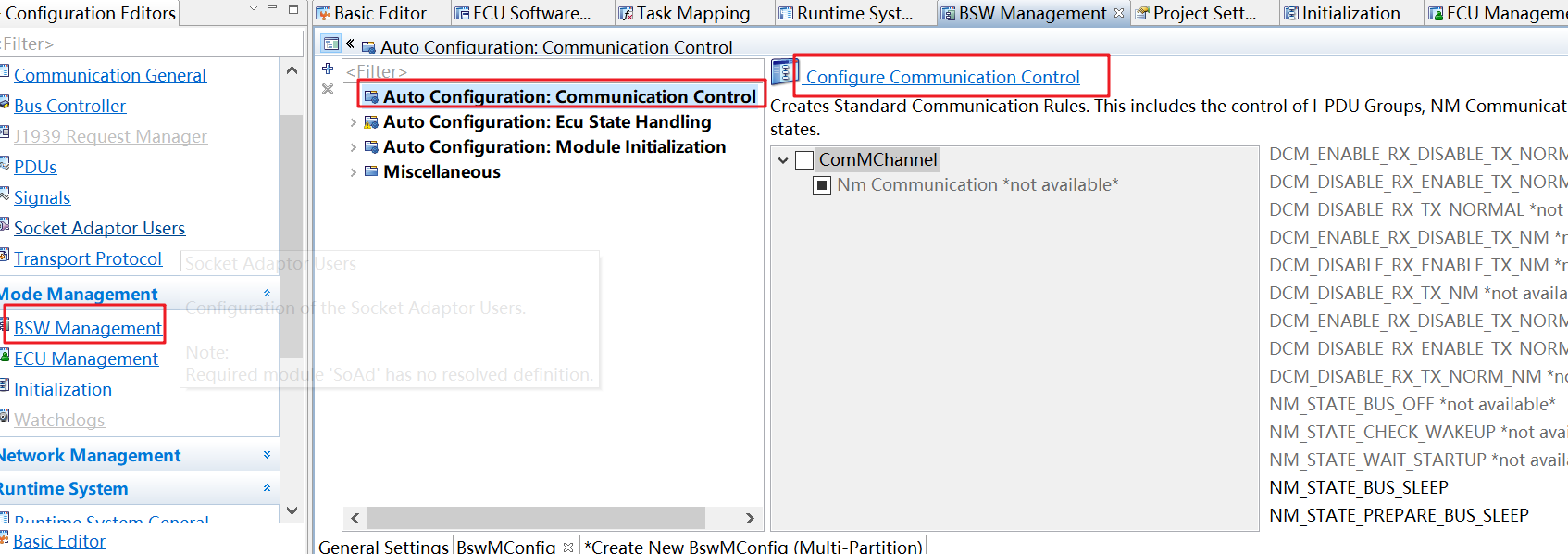
通信控制中,最基本的也是按照自动生成的Rules来处理的
ComM
ComM像一个通信的总开关,可以管住CAN、LIN、以太网等通信网络. 主要有3种状态:
- Full Communication(全通信)
- Silent(静默状态)
- No Communication(不通信)
ComM可通过NM(Network Manager,网络管理)保持网络的唤醒,也可通过SM(State Manager)激活通信.
下面通过2种唤醒源解释ComM状态机.
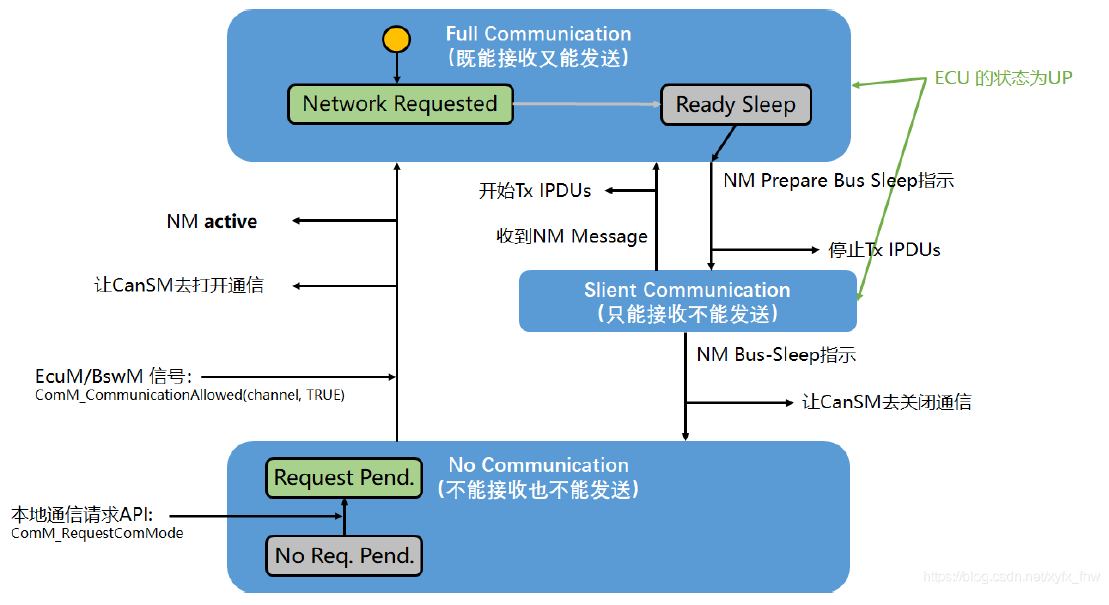
内部唤醒
1)当ComM初始化时,会先进入No Communication中,该状态下会不断循环判断有没有本地或远程的唤醒请求
2)如果循环中判断出本地通信请求API执行,则开始往Full Communication走(Allow 通道、让CanSM打开通信)
3)此时,NM会处于主动激活状态,快速发送一系列NM Message. 然后,进入Full Communication
4)进入Full Communication后,由于内部唤醒,首先进入Network Requested状态,执行正常的发送接收信息的状态,能一直主动保持Network的唤醒状态
5)一旦本地COM Mode释放后,则进入Ready State状态
6)如果此时其他ECU无需通信,Network进入Prepare Bus Sleep状态,ComM开始停止Tx IPDUs,不再发送数据,进入Slient状态
7)在Slient状态下,如果收到NM Message,则又回到Full Communication
8)在Slient状态下,如果没有收到NM Message,且此时收到NM Bus-Sleep的指示,则让CanSM去关闭通道,然后进入No Communication状态
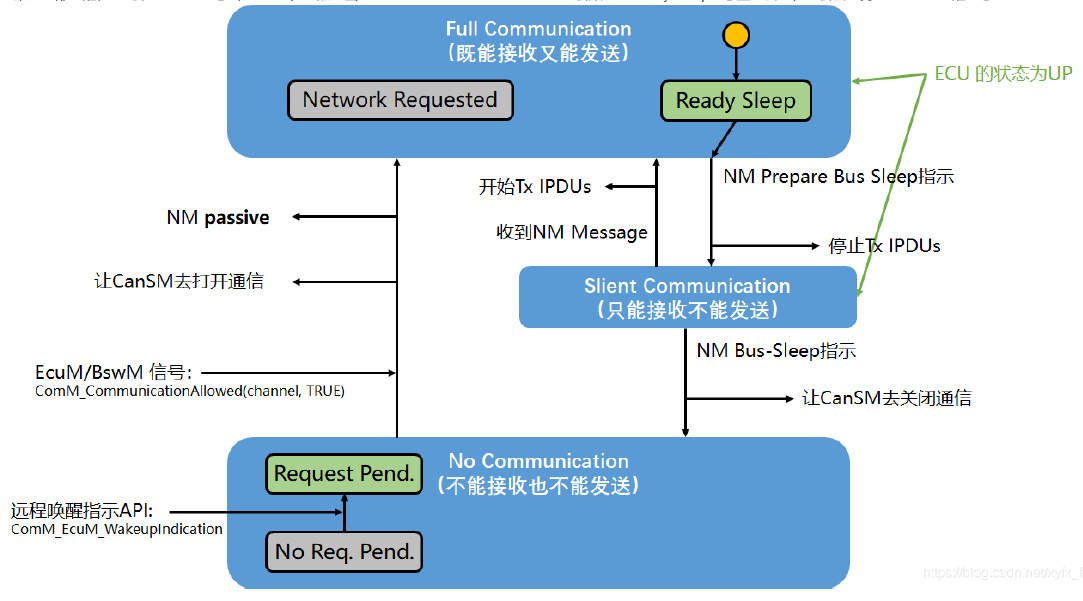
外部唤醒
如果被外部唤醒,NM会进入被动状态(Passive). 当ComM进入Full Communication后,默认进Ready Sleep状态,不会保持Network的唤醒状态.
CanSM
CanSM 管理ECU内部CAN节点状态.
NM 管理通信总线的状态,SM管理ECU本身通信节点的状态. CanSM针对ECU的CAN功能的状态管理(覆盖CanIf层),即可控制MCU内置CAN外设或外置CAN PHY的状态
状态关联
Ecu、Com、Network的状态图及其关系如下:
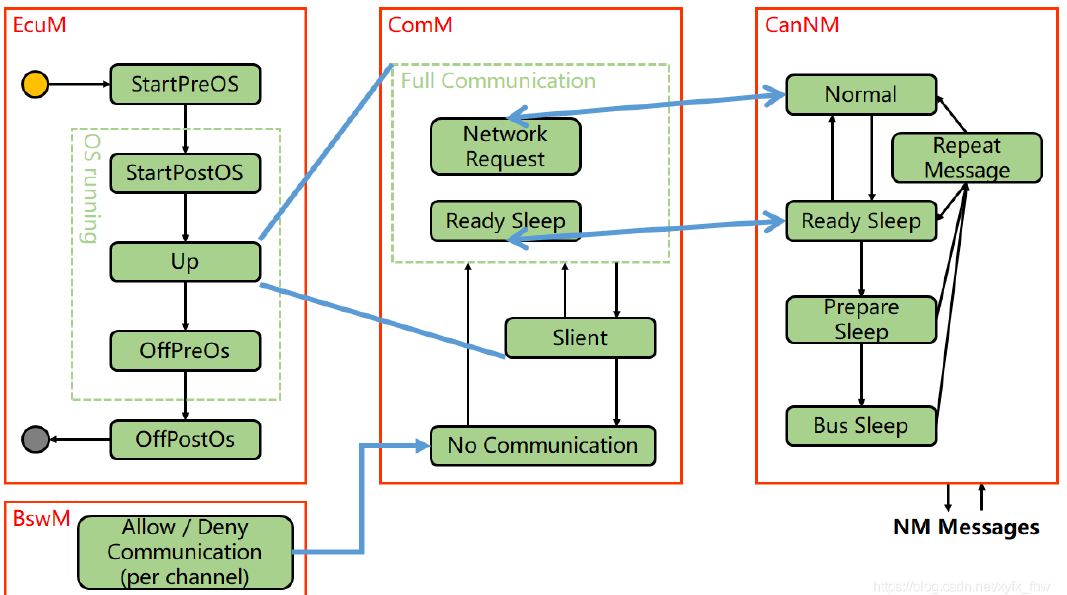
- 只有当EcuM处于UP状态下,才能保持ComM的Full Communication状态和Slient状态
- CanNM负责网络管理
- ComM能全权负责本ECU通信状态,即管理SIM模块,但Network的状态不仅与本ECU有关,还与其他ECU有关,所以ComM对NM有一定的协调作用,而非全权管理
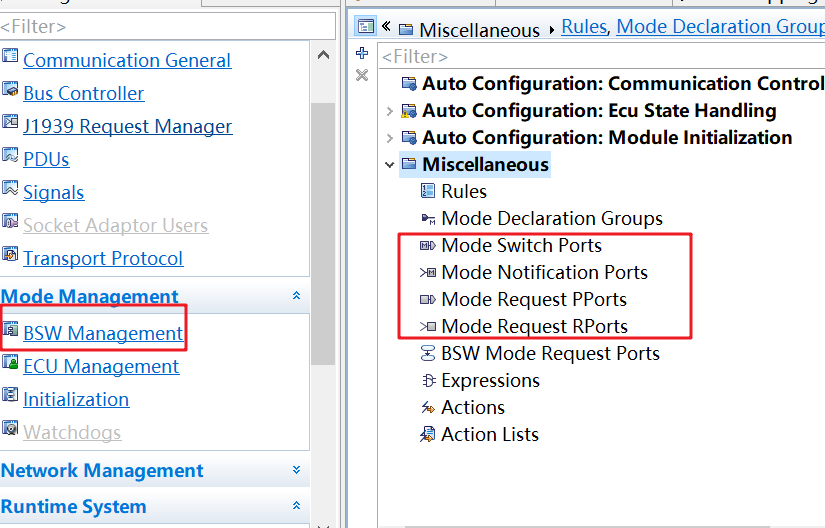
手动模式管理
前面讲模式管理时,用的是自动配置,而手动配置需要用到 Miscellaneous.
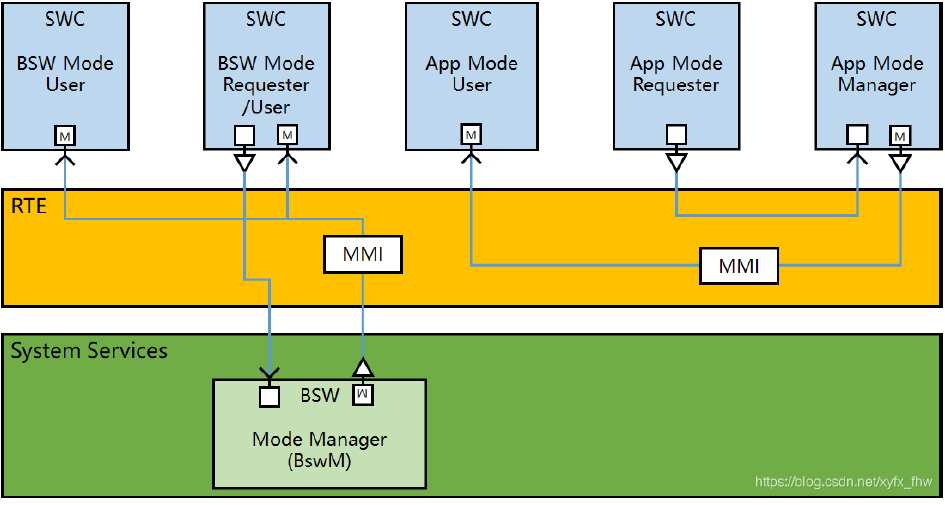
手动配置模式管理,需要涉及3个角色:
- Mode Requester:模式请求者
- Mode User:模式使用者(模式用户)
- Mode Manager:模式管理者(模式管理器)
它们会用到以下Ports:
Mode Requester(MRqr)
MRqr 对模式管理者(Mode Manager)请求一个模式切换,请求通过S/R接口实现,接口称之为 Mode Request PPorts.
MRqr可以是SWC,也可以是BSW,在一些BSW中没有S/R接口,可直接使用BswM_RequestMode()当接口
Mode User(MUsr)
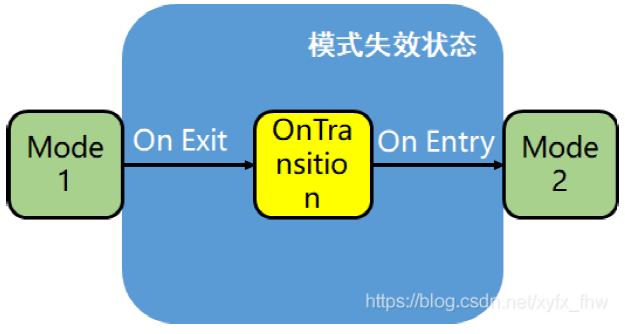
MUsr 实现模式切换的对象,MUsr在收到一个 Mode Switch RPorts 的切换指令后,可以开始做一个模式切换.
模式使用者,通常也是模式请求者,所以一般也具有Mode Request PPorts. 模式切换分为5个阶段:Mode 1, On Exit(退出原模式),On Transition(模式切换),On Entry(进入新模式),Mode 2.
从On Exit到On Entry阶段,MUsr会处于模式失效状态.
Mode Manager (MMgr)
MMgr 根据Rules执行Action. MMgr 会收集其他模块的请求,然后根据rules判断是否能做模式切换.
如果可以,就告知相应模块进行切换. 收集其他模块的模式请求,用到了Mode Request RPorts;告知相应模块进行模式切换,用到了Mode Switch Ports.
Mode Declaration Group
Mode Declaration Group(模式声明组),以枚举形式定义模式,即给模式赋一个值,方便C语言用.
如我们的EcuM模块,用到了这几个模式:

Mode Switch Event
模式使用者在进行模式切换时,3种状态On Exit、On Transition、On Entry 能触发一个切换事件,该切换事件可以触发一个Runnable运行,从而实现切换过程中定制行为.
小结
模式管理本质是一个状态机,允许在同一个状态下,能进行一系列相关性操作,例如,LED亮灭,按键消抖. 因为有些操作无法立即返回结果,必须等待一段时间.
参考
[1] AutoSAR入门到精通系列讲解

 浙公网安备 33010602011771号
浙公网安备 33010602011771号