AUTOSAR笔记:AUTOSAR基础
简介
什么是AUTOSAR?
AUTOSAR(AUTomotive Open System ARchitecture, 汽车开放系统结构) 是汽车电子行业的一系开放式列标准总称.
2003.9由德国汽车制造商、汽车电子供应商共同成立AUTOSAR组织,旨在推动建立该标准.
包括的汽车企业有:
BMW、Bosch、Continental、Toyota等。
包括的芯片厂商有:
英飞凌、NEC、瑞萨等.
解决什么问题?
- 功能不断提升,E/E(汽车电气/电子)设备复杂度提升
- 提升产品更改、升级、更新灵活性
- 提升产线内或跨生产线可度量性
- 提升E/E系统质量和可靠性
- 早期设计阶段检查错误
AUTOSAR主要特征
- 模块化、可配置性
- 定义汽车电子控制单元的分层基础软件架构,以便封装硬件依赖
- 考虑硬件相关和硬件独立的软件模块
- 实现不同供应商提供的基础软件模块的集成,增加功能重用
- 功能软件组件可转移性
- 根据功能部署,实现每个ECU的软件基础设施的资源优化配置
- 提高E/E架构可扩展性
- 标准化接口
- 标准化不同的API,分离AUTOSAR软件层
- 便于封装功能软件组件
- 软件组件的数据类型定义
- 软件基础设施的基础软件模块接口标准化
- 运行时环境RTE
- 在车辆网络的所有节点之间,提供ECU之间通信
- 位于功能SWC、基本SW模块之间
- 连接到AUTOSAR RTE的所有实体,必须符合AUTOSAR规范
- 可轻松集成客户特定功能的软件模块
- 验收测试
- 标准化测试规范:测试应用程序,总线兼容性相关的基础软件、RTE实现
常用技术
- 标准化的规范交换格式(e.g. arxml描述文件)
- 基础软件核
- MCU抽象
- RTE(运行时环境)
- 接口标准化
AUTOSAR软件结构
软件分层、组成
软件组成:
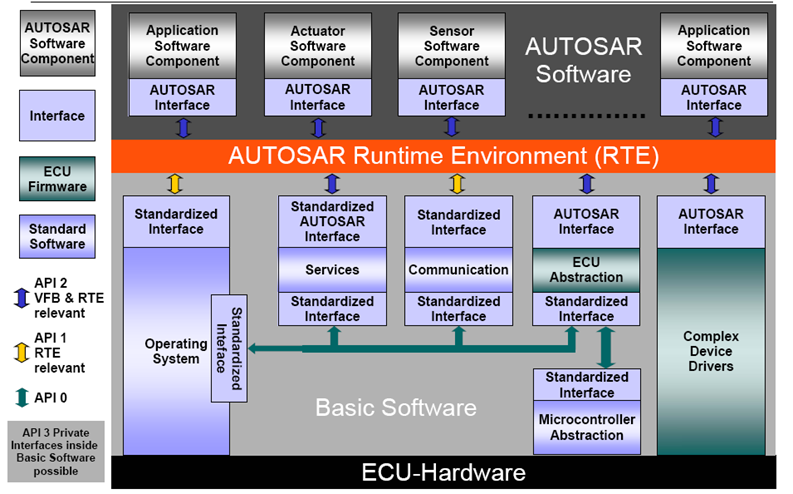
- AUTOSAR Software Component(软件组件,SWC):包括 应用SWC、执行SWC、传感器SWC
- Interface(接口):分为 标准接口、AUTOSAR接口
- ECU Firmware(ECU固件):主要包括 复杂设备驱动、ECU抽象
- Standard Software(标准软件):主要包括OS、系统服务(Services)、通信(Communication)、MCU抽象
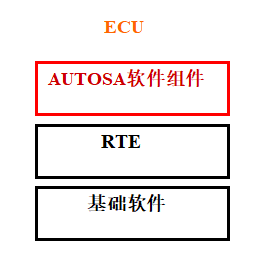
软件分层:
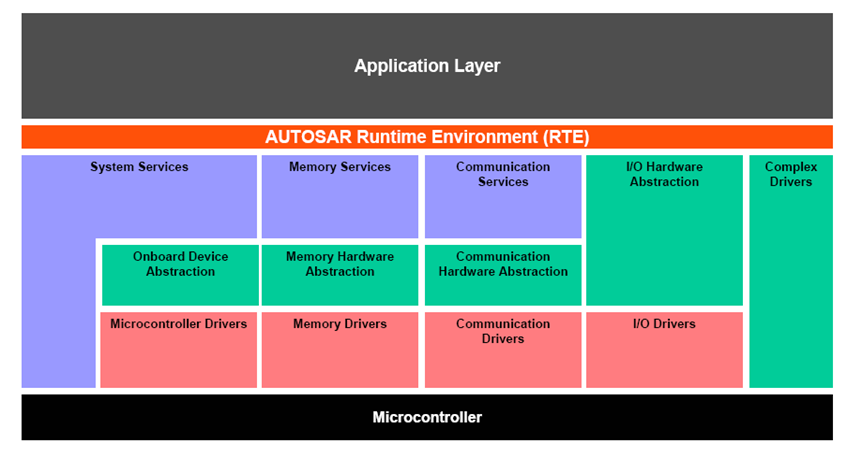
- Application Layer(应用软件层):包含若干软件组件,软件组件之间通过端口(Port)通信
- RTE(运行时环境):应用软件层与基础软件层交互的桥梁,分离软件与硬件
- Basic Layer(基础软件层):包含4层
- Service Layer(服务层):提供常用服务,如系统服务、存储服务、通信服务
- ECU Abstract Layer(ECU抽象层):包括板载设备抽象、存储硬件抽象、通信硬件抽象、I/O硬件抽象
- MCU Abstract Layer(MCU抽象层,MCAL):包括MCU驱动、存储驱动、通信驱动、I/O驱动
- Complex Drivers(复杂驱动):复杂传感器、执行器的模块,没被标准化
举例说明:
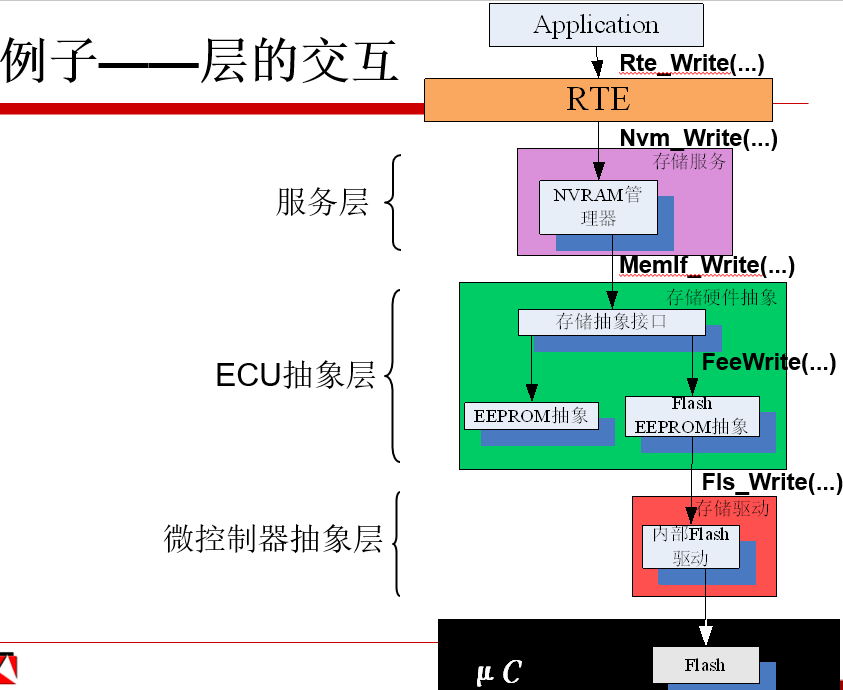
层与层之间交互/调用逻辑如下:
1)应用软件层中SWC通过调用Rte_Write()接口,向RTE请求写操作;
2)RTE调用Nvm_Write()接口,向存储服务模块(NVRAM管理器)请求写操作;
3)NVRAM管理器调用MemIf_Write(),向存储硬件抽象模块中的存储抽象接口请求写操作;
4)存储抽象接口调用FeeWrite(),向Flash EEPROM抽象模块请求写操作;
5)Flash EEPROM抽象 调用Fls_Write(),向存储驱动中的内部Flash驱动请求写操作,最终实现写MCU Flash操作.
RTE
- RTE是AUTOSAR核心,实现软硬件分离的重要部分
- RTE实现虚拟功能总线(VFB)接口
- 实现SWC之间通信
- 提供SWC间通信的基础服务
- 使得SWC能访问OS、通信服务在内的基础服务
SWC
- 概念上位于RTE之上,包括应用SWC、传感器SWC-执行器SWC
- 系统配置期间可以配置给任何可用的ECU(∵RTE屏蔽了硬件差异)
- RTE确保SWC可以通信(SWC之间并不直接耦合,由RTE解耦)
可运行实体RE
每个SWC可包含1或多个运行实体(Runnable Entity,RE),RE中封装了相关控制算法,可由RTE触发.
具体来说,RE是由RTE启动的SWC中的一段指令及相关数据集(程序及数据).
- RE代表了一个SWC的功能
- 1个SWC提供1或多个RE
- 1个RE有一个入口点
- RTE调用RE,由RTE事件激活
通信
通信接口由一些端口组成.
特点:
- SWC能和位于同一个ECU上的其他SWC通信
- SWC能和位于不同ECU上的其他SWC通信
- SWC能和有端口并位于同一ECU上的基础软件模块通信
- 通信是静态的(需要事先配置好,非程序动态分配)
端口(Port)根据I/O方向,分为:
- 需型端口(Require Port,RPort),从其他SWC获取所需数据或所请求操作
- 供型端口(Provide Port,PPort),对外提供数据或操作
- 供需端口(Provide and Require Port,PRPort),兼具RPort、PPort特性
端口定义方向,端口接口(Port Interface)定义端口的属性. 常用端口接口:
- 发送-接收 端口接口(Sender-Receiver Interface,S/R),提供消息传递.
- 客户-服务 端口接口(Client-Server Interface,C/S),服务端为客户端提供功能调用.
ECU内SWC通信模型:
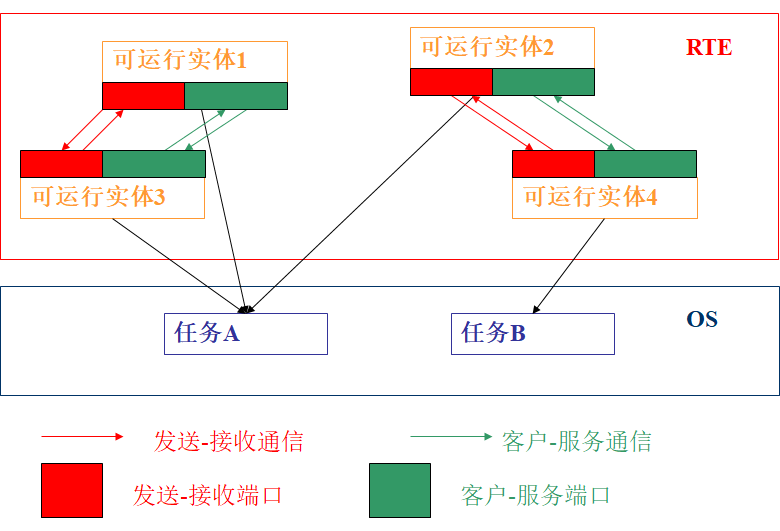
OS中,运行2个任务:A、B. A由RE1、RE2、RE3协作完成,B由RE2、RE4协作完成.
不同RE之间通信,可通过端口完成.
ECU间SWC之间通信:
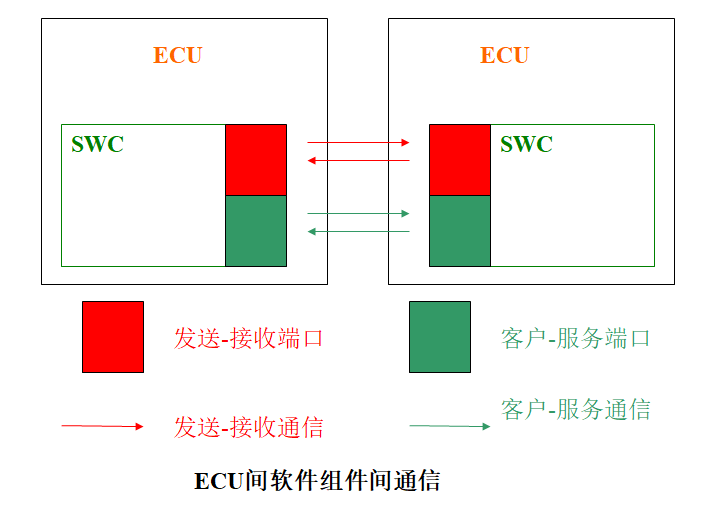
不同ECU上SWC之间通信,也是通过端口来完成.
通信模式
针对发送-接收通信,有2种通信模式:
1)显式的:使用显式的RTE API调用来发送或接收数据元素
2)隐式的:RE被调用前,RTE自动读一个特定的数据元素集合;RE终止后,RTE自动往另外数据元素集合写
系统服务
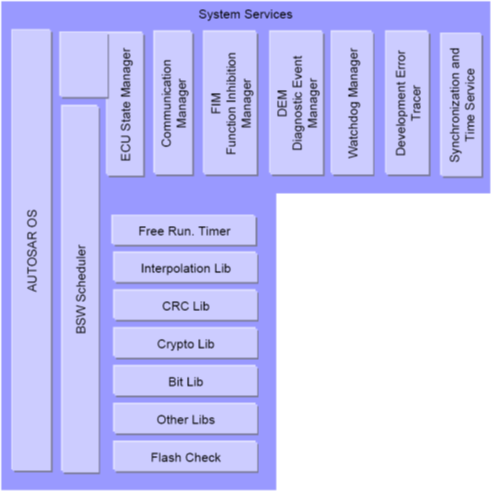
系统服务(Services)为应用和基础软件模块提供基本服务.
系统服务,包含哪些?
- OS
- ECU状态管理器
- BSW调度器
- WDog管理器
OS
OS基本特征:
-
静态配置(汽车行业MCU,不用动态分配内存)
-
能推断实时系统性能(如何进行?包括哪些?)
-
提供基于优先级的调度策略
-
提供运行时保护功能(存储、计时等)
-
可驻留在低端MCU上,不需要其他资源
-
资源裁剪
对于特殊应用,OS可配置为只包含该应用需要的服务. 因此,OS的资源需求会尽可能的少.
- 使用其他OS
如果AUTOSAR组件需要在某些专用OS运行,i.e. Win CE、VxWorks、QNX等,应该使用AUTOSAR OS中定义的接口作为OS抽象层(OSAL).
那些不使用AUTOSAR OS的系统,可通过OS抽象层(OSAL)提供AUTOSAR SWC执行的平台. AUTOSAR OS严格定义了连接到OSAL的接口.
- 兼容性
AUTOSAR OS核心功能基于OSEK OS => APP向后兼容
- 新特性
使用AUTOSAR OS引入的一些新特性,需要对已存在的OSEK OS特性的使用有所限制
AUTOSAR OS扩展了一些已存在的特性
| function | description |
|---|---|
| GetApplicationID | 获取SWC的application ID |
| GetISRID | 获取当前正在执行的中断服务例程ID |
| CallTrustedFunction | 实现可信/非可信环境切换的关键机制, 允许非可信代码安全地调用可信环境中的函数 |
| CheckISRMemoryAccess | 验证中断服务程序(ISR)对内存区域的访问权限 |
| CheckTaskMemoryAccess | AUTOSAR OS提供的一项内存保护功能,验证任务(Task)对特定内存区域的访问权限 |
| CheckObjectAccess | 验证任务或ISR对系统对象(如资源、设备、服务等)的访问权限 |
| CheckObjectOwnership | 确认特定任务或应用对系统对象(如资源、设备、内存区域等)的所有权关系 |
| StartScheduleTableRel | 基于相对时间启动调度表(Schedule Table) ,是AUTOSAR时间触发系统的核心功能之一 |
| StartScheduleTableAbs | 基于绝对时间启动调度表(Schedule Table),与StartScheduleTableRel不同是基于绝对时间 |
| StopScheduleTable | 停止正在运行的调度表(Schedule Table),与StartScheduleTableRel、StartScheduleTableAbs搭配使用 |
| NextScheduleTable | 实现调度表链式执行,当前调度表完成后自动启动下一个关联的调度表,形成执行链 |
| IncrementCounter | 手动递增软件计数器(Software Counter) ,属于AUTOSAR时间服务的一部分,常用于没有硬件定时器支持的特殊场景或测试目的 |
| SyncScheduleTable | 同步调度表与时间基准,通过调整调度表的相位(phase)来实现多个调度表间的精确时间对齐,是AUTOSAR时间触发架构中实现分布式系统同步的核心机制 |
| SetScheduleTableAsync | 异步设置调度表状态,允许非阻塞地配置调度表参数,适用于需要动态调整调度表且不能立即等待操作完成的场景 |
| GetScheduleTableStatus | 查询调度表当前运行状态 |
| TerminateApplication | 安全终止应用程序,回收应用资源 |
| DisableInterruptSource | 禁用特定的中断源 |
| EnableInterruptSource | 与DisableInterruptSource配对使用,启用特定的中断源 |
| ProtectionHook | 属于内存/资源保护回调机制. 当发生内存访问违规或资源冲突时,操作系统会调用预先注册的钩子(Hook)函数进行处理. 通常用ARXML配置 |
注:
1)可信函数(Trusted Function)指AUTOSAR架构中具有特殊执行权限和安全保障的函数,通常用于处理安全关键操作或访问受保护资源.
2)CheckObjectAccess与其他保护机制的关系:
调度表
调度表(Schedule Table)是AUTOSAR OS中一种时间触发调度机制,它通过预定义的时间序列来精确控制任务、事件和警报的触发时机
调度表链接机制
BSW调度器
BSW调度器是基础软件层的任务调度管理系统,负责协调和执行各种基础软件模块(BSW模块)的周期性主函数(MainFunction).
功能:
- 将BSW模块的实现嵌入OS上下文
- 触发BSW模块的主要处理函数
- 应用BSW模块的数据一致性机制
BSW调度器建立AUTOSAR OS任务体,安排OS任务体内对主处理函数的调用.
BSW调度与调度表区别:
BSW调度器处理基础设施服务,而调度表管理应用层的实时控制逻辑.
二者协同工作关系:
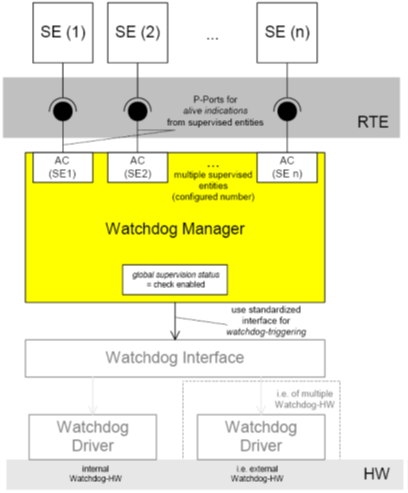
看门狗管理器
看门狗管理器 是BSW中负责监控系统健康状态的核心安全机制,通过硬件看门狗定时器(WDT)确保ECU出现软件故障时能安全恢复.
一种恢复机制.
在触发看门狗硬件的同时,提供了对一些独立应用的生存监控.
诊断服务
诊断服务包括:
1)诊断事件管理器
2)功能禁止管理器
3)开发错误跟踪器
4)诊断通信管理器
诊断事件管理器
诊断事件管理器(Dem)负责处理和存储诊断事件(错误)和相关FreezeFrame(冻结帧)数据,提供标准化的故障存储、事件处理和诊断信息服务.
特性:
-
事件生命周期管理:
- 故障检测与确认
- 老化处理(Aging)
- 故障计数器管理
-
统一事件存储
- DTC管理
- 冻结帧(Free Frame)存储
- 扩展数据记录
-
诊断服务支持:
- 读取DTC服务(0x19)
- 清除DTC服务(0x14)
- 读取冻结帧服务(0x19 02)
功能禁止管理器
功能禁止管理器(Function Inhibition Manager,FIM)负责动态控制软件功能可用性的安全机制,根据系统状态和诊断结果禁用或启用特定功能.
开发错误跟踪器
开发错误跟踪器(Development Error Tracer,DFT) 主要用于在开发期间跟踪和记录错误.
API参数给出追踪源和错误类型:
- 错误所在的模块
- 错误所在的功能
- 错误类型
接口:
| service function | description |
|---|---|
| FIM_Init() | 初始化FIM模块 |
| FIM_GetFunctionState() | 查询功能状态 |
| FIM_SetFunctionState() | 手动设置功能状态 |
| FIM_MainFunction() | 主处理函数 |
诊断通信管理器
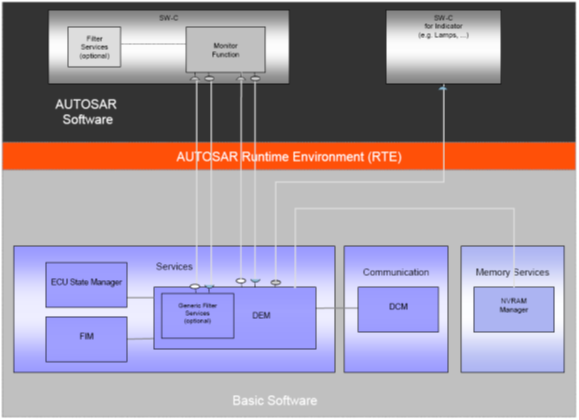
诊断通信管理器(Diagnostic Communication Manager,DCM)是负责处理诊断请求和响应的核心组件,实现UDS(ISO 14229)、OBD(ISO 15031)等标准诊断协议的服务层功能.
DCM与PDU(Protocol Data Unit)路由器(Router)之间有一个接口,在通信过程中,DCM从PDU路由器接收诊断消息.
DCM在内部处理、检查诊断消息,并把消息送到AUTOSAR SW组件进一步处理.
DCM在AUTOSAR体系结构中的位置:
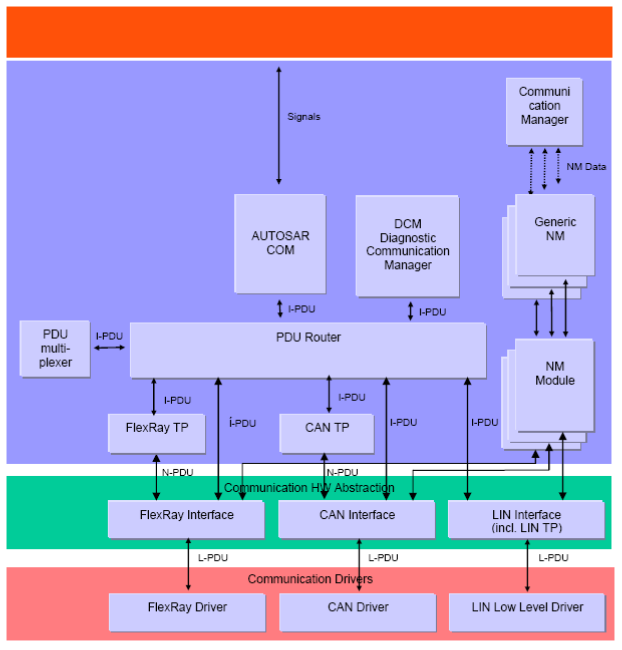
通信栈
主要包含:CAN、COM(通信)、FlexRay、LIN
通信栈与PDU Router关系:
CAN
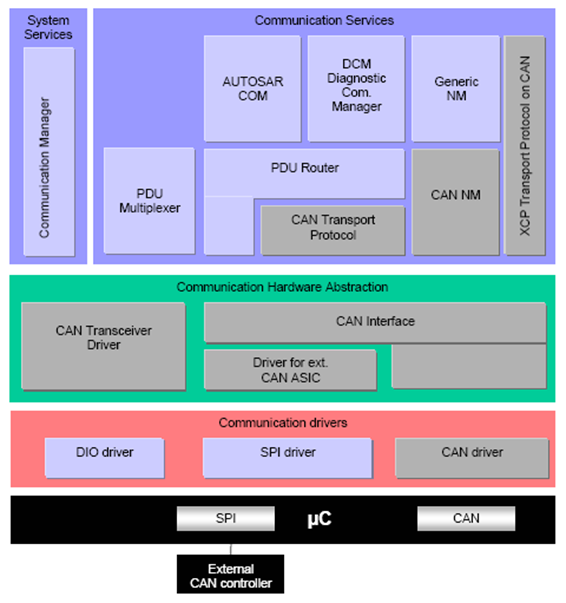
AUTOSAR CAN通信栈,实现CAN总线通信功能的基础软件集合,提供从硬件抽象到应用接口的完整通信解决方案.
AUTOSAR CAN分层体系结构如下图(灰色方块):
CAN通信示例:
发送
接收
CAN驱动
CAN驱动(CAN driver)是最底层的一部分,为上层执行对硬件的访问和提供硬件无关的API.
特点:
- 为上层使用者提供统一接口,即CAN接口.
- 尽可能合理隐藏相关CAN Controller的硬件专用性.
CAN接口
CAN接口(CAN Interface)提供标准化接口,通过ECU的CAN总线系统来支持通信.
特点:
- 通过统一接口访问1个或多个CAN驱动
- 仅能用于CAN通信
CAN传输层
CAN传输层(CAN Transport Protocol,TP)位于PDU Router和CAN接口模块之间的模块. 主要作用:分割和合并>8byte的CAN I-PDU(交互协议数据单元).
CAN传输层提供的服务:
- 发送方向的数据分割;
- 接收方向的数据合并
- 数据流控制
- 分割期间内的错误检测
CAN收发器驱动
CAN收发器驱动(CAN Transceiver Driver)直接控制CAN收发器硬件的底层驱动模块,负责管理CAN总线的物理层连接和电源状态.
该驱动与所使用CAN Tranceiver强相关,如TJA1042,1043.
目标:
- 抽象使用CAN收发器设备硬件芯片,向更高层提供硬件无关接口
CAN模块API
| sub-module | function |
|---|---|
| CAN驱动 | Can_Init Can_GetVersionInfo Can_InitController Can_Write |
| CAN接口 | CanIf_Init CanIf_InitController CanIf_Transmit CanIf_SetControllerMode CanIf_GetControllerMode |
| CAN传输层 | CanTp_Init CanTp_Shutdown CanTp_Transmit |
| CAN收发器驱动 | CanTrcv_Init CanTrcv_GotoNormalMode CanTrcv_GetOpMode CanTrcv_GotoStandByMode CanTrcv_GotoSleepMode |
COM
AUTOSAR COM(Communication)是BSW中负责信号级通信的核心组件,提供应用层与底层通信协议栈之间的信号接口,实现整车网络的信号交换和处理.
位于服务层.
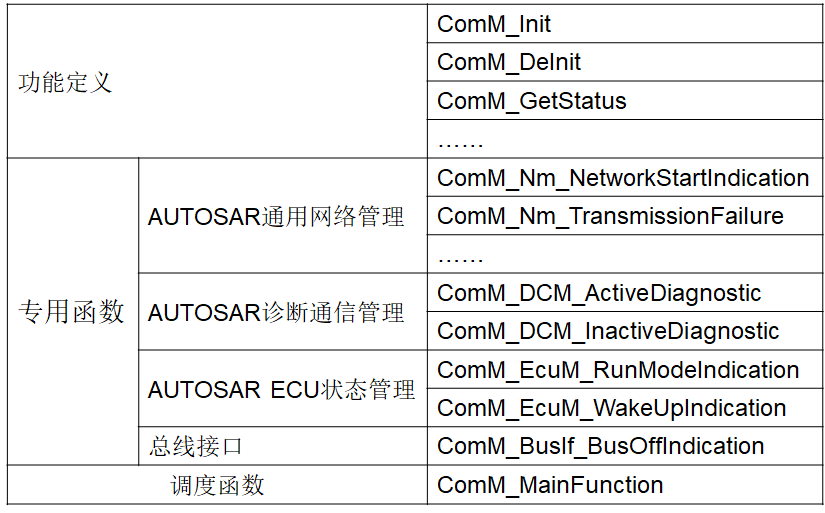
COM管理(COM Manager,ComM)是BSW的一个组件,COM Manager控制的BSW模块与通信相关,而不是与SWC或RE相关.
位于模式管理层.
COM Manager从通信请求者收集总线通信访问请求,并协调总线通信访问请求.
COM Manager目标:
- 简化总线通信栈的使用,包括总线通信栈的初始化、简化的网络管理(Net Management,NM)处理
- 协调与多个SWC(同一ECU)无关的总线通信栈(允许信号的发送和接收)的可用性
- 临时性取消信号的发送,以阻止ECU唤醒通信总线
- 控制ECU的一个以上的通信总线通道,通过为每个通道实现一种状态机制来实现
- 提供使ECU保持总线处于“静默通信”模式
- 通过分配对请求通信模式必需的所有资源来简化资源管理
COM API:
| Module | Function |
|---|---|
| COM | Com_Init |
| Com_DeInit | |
| Com_GetStatus | |
| Com_GetVersionInfo | |
| Com_GetConfigurationId | |
| Com_SendSignal | |
| Com_ReceiveSignal | |
| COM Manager | ComM_Init |
| ComM_DeInit | |
| ComM_GetVersionInfo | |
| ComM_GetStatus | |
| ComM_RequestComMode | |
| ComM_GetMaxComMode | |
| ComM_GetRequestedComMode | |
| ComM_GetCurrentComMode |
AUTOSAR COM与OSEK COM很相似,不过多了一个COM Manager.
AUTOSAR COM vs OSEK COM:
- 相同的功能、服务
1)启动与控制服务
| OSEK | AUTOSAR |
|---|---|
| StartCOM StopCOM GetCOMApplicationMode InitMessage StartPeriodic StopPeriodic |
Com_Init Com_DeInit Com_IpduGroupStart Com_IpduGroupStop Com_DisableReceptionDM Com_EnableReceptionDM Com_GetStatus Com_GetConfigurationId Com_GetVersionInfo |
在这部分,AUTOSAR的API更多,功能更强;AUTOSAR的启动与控制服务中包含对I-PDU(交互层协议数据单元)的处理与控制,如Com_IpduGroupStart,Com_IpduGroupStop.
2)通信服务
| OSEK | AUTOSAR |
|---|---|
| SendMessage ReceiveMessage SendDynamicMessage ReceiveDynamicMessage SendZeroMessage GetMessageStatus COMErrorGetServiceId COMError_Name1_Name2 |
Com_SendSignal Com_ReceiveSignal Com_UpdateShadowSignal Com_SendSignalGroup Com_ReceiveSignalGroup Com_ReceiveShadowSignal Com_InvalidateSignal Com_InvalidateShadowSignal Com_TriggerIPDUSend |
OSEK通信服务包含对错误的简单处理,如获得错误服务的id(COMErrorGetServiceId);
AUTOSAR通信服务包含对I-PDU的处理,如Com_TriggerIPDUSend.
注:IPDU(Interaction Layer Protocol Data Unit,交互层协议数据单元)和AUTOSAR中核心数据传输单元,负责SWC与底层通信协议栈之间传递数据.
3)OSEK通知机制支持服务 与 AUTOSAR回调通知服务
| OSEK | AUTOSAR |
|---|---|
| ReadFlag ResetFlag |
Com_TriggerTransmit Com_RxIndication Com_TxConfirmation |
这部分差别不大. 针对一些标志的修改、设置,以控制通信的状态和执行的功能.
- 不同的功能、服务
1)OSEK为I-PDU提供一类专门服务,称为OSEK间接网络管理,包含2个API:
I_MessageTransfer I-PDU传输指示;I_MessageTimeOut I-PDU传输超时指示.
2)OSEK提供一些例程对通信起扩展作用,包含3个API:
StartCOMExtension扩展通信启动过程的特殊机制,COMCallouts,COMErrorHook.
3)AUTOSAR提供一些调度函数,主要针对消息或信号的接收或发送其到路由、调度的作用,包含3个API:
Com_MainFunctionRx(周期调度)处理所有 接收到的 PDU,Com_MainFunctionTx(周期调度)负责处理 信号的打包和发送(Tx)操作,Com_MainFunctionRouteSignals处理信号路由(Signal Routing)相关的任务.
4)AUTOSAR有一个COM Manager 通信管理模块,AUTOSAR特有,负责对通信进行监控、管理、诊断以及管理涉及通信的ECU状态.
COM Manager部分API:
LIN
LIN(Local Interconnect Network,局部互联网络)包括:LIN驱动、LIN接口.
AUTOSAR LIN分层体系结构:
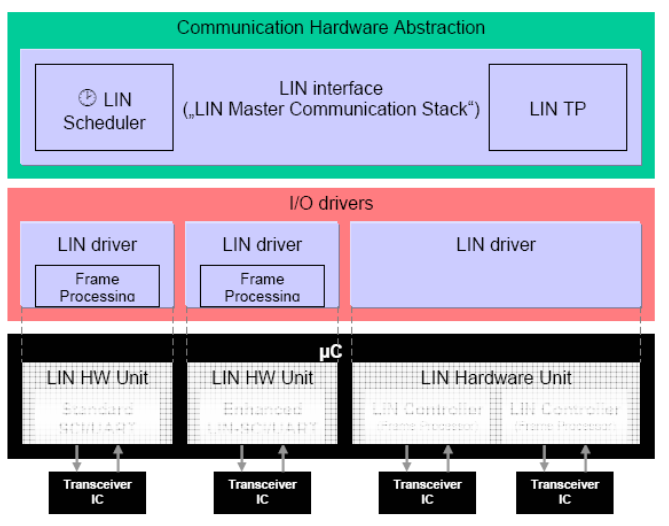
- LIN驱动
LIN驱动是最底层的一部分,执行硬件访问,为上层提供硬件无关API.
一个LIN驱动能支持1个以上通道(同LIN单元).
- LIN接口
LIN接口硬件无关,位于上层模块(PDU路由器)和下层模块(LIN驱动)之间.
LIN接口能处理1个以上LIN驱动,1个LIN驱动能支持1个以上通道.
LIN接口提供功能:
1)为每个与ECU连接的LIN总线执行当前选择的调度
2)当上层请求到来时,切换调度表
3)从上层接收帧的传送,并传送数据部分作为适当LIN帧中响应
4)当相应的响应在适当的帧中接收时,为上层提供帧接收通知
5)睡眠和唤醒服务
6)错误处理
7)诊断传输层服务
| OSEK | AUTOSAR |
|---|---|
| LIN驱动 | Lin_Init Lin_GetVersionInfo Lin_GetStatus Lin_InitChannel Lin_DeInitChannel Lin_GoToSleep Lin_Wakeup |
| LIN接口 | LinIf_Init LinIf_ChannelInit LinIf_GetVersionInfo inIf_Transmit LinIf_GotoSleep LinIf_WakeUp |
| LinTp_Transmit LinTp_Shutdown |
AUTOSAR方法、模型、工具
AUTOSAR方法
在系统开发的某些步骤需要通用的技术方法,称为AUTOSAR方法.
AUTOSAR方法 没有定义角色、责任,不规定要执行哪些活动,不定义整体的时间线,也并不定义迭代怎样和何时执行.
AUTOSAR方法是一个工作产品流(work-product flow),定义“工作产品流”中活动的相互依赖性.
常用到的图形:
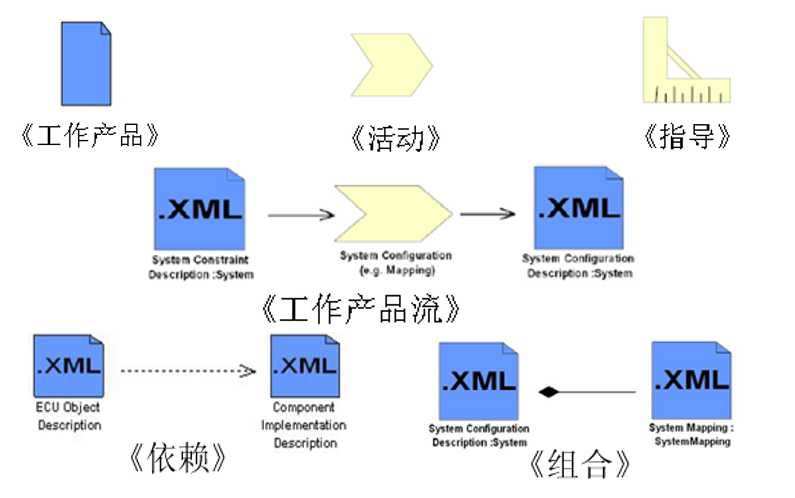
ECU从设计到构建、集成的典型的过程:
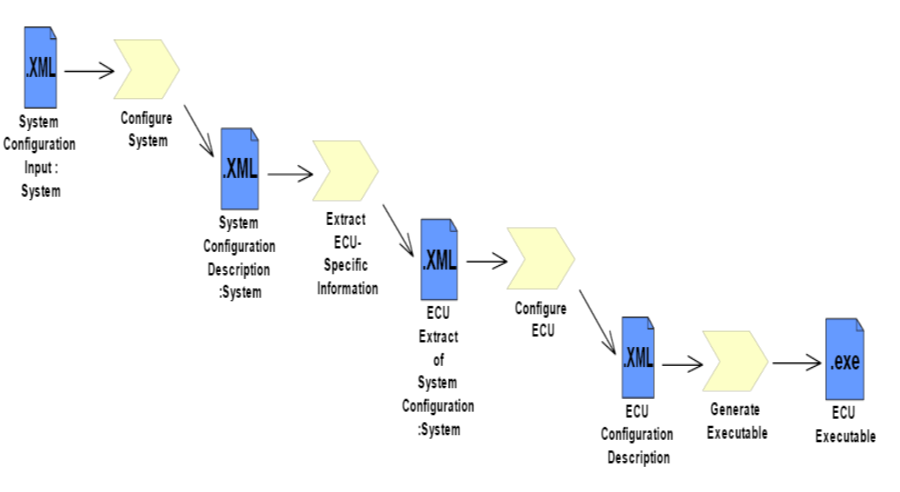
可以看出,每个活动都有一个工作产品(.xml)输出.
AUTOSAR模型
AUTOSAR模型是UML2.0一个子集,是UML2.0元模型的简化.
因为UML2中,高度模块化的结构和对类、属性、关联重定义的过度使用,有时很难在用一两幅图展现某个特定方面的同时,又保持清晰可读性. 因此,简化2.0元模型.
AUTOSAR模型与UML区别:
| 规则 | 说明 |
|---|---|
| [ATPS-06] | AUTOSAR不支持名字空间,所以所有类的名字必须全局唯一 |
| [ATPS-07] | 模型中的所有元素都必须是“Public” |
| [ATPS-08] | 模型元素不得使用重定义 |
| [ATPS-11] | 类中不得有操作 |
| [ATPS-13] | 模板类属性和关联角色不得定义为静态 |
| [ATPS-14] | 常规类必须标注属性 |
| [ATPS-15] | 属性不得定义为只读 |
| [ATPS-16] | 属性定义必须唯一 |
| [ATPS-17] | 属性不得派生于另一个属性 |
| [ATPS-25] | 聚合只能是组合聚合(实心菱形表示),而不能是共享聚合 |
| [ATPS-27] | 不得定义操作属性 |
| [ATPS-28] | 《atpType》表示该类描述的是可重用类型 |
| [ATPS-29] | 《atpPrototype》表示该类描述了另一个类的用法 |
| [ATPS-30] | 关联不得标名 |
| [ATPS-31] | 关联只能是二重的 |
| [ATPS-33] | 关联只能有一个导向端 |
| [ATPS-34] | 《isOfType》表示原型和其定义的类型之间的特殊关系 |
| [ATPS-35] | 《isOfType》只能用于从atpPrototype到atpType |
| [ATPS-37] | 《instanceRef》表示源类引用了prototype的一个实例 |
| [ATPS-38] | 《instanceRef》总是指向prototype |
| [ATPS-41] | 依赖只能标记为《trace》、《use》和不标记。 |
例:一个简单模型
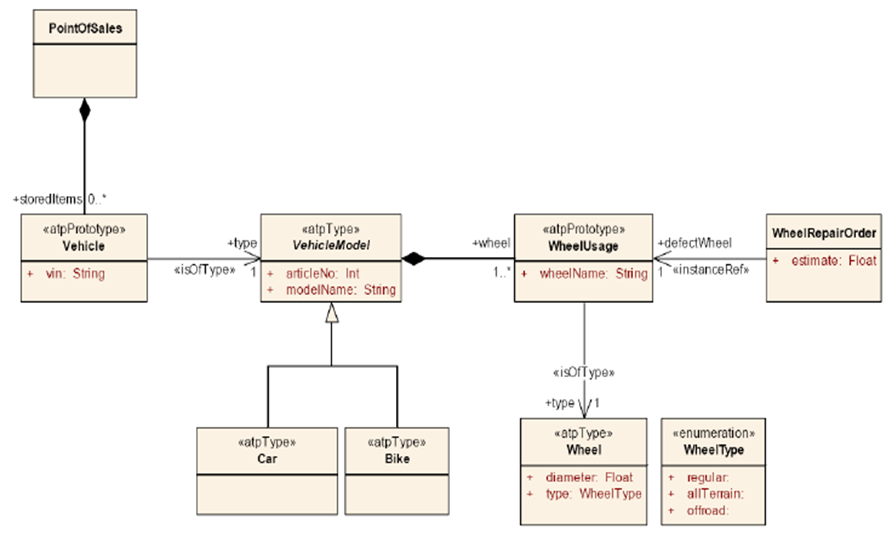
是不是很像我们平时画的类图?
AUTOSAR工具
AUTOSAR创作工具指所有支持解释、修改、创建用于描述系统的AUTOSAR XML描述(AUTOSAR模型的XML表示)的工具.
这些模型由以下模板产生:
- SWC模板
- ECU资源模板
- AUTOSAR系统模板
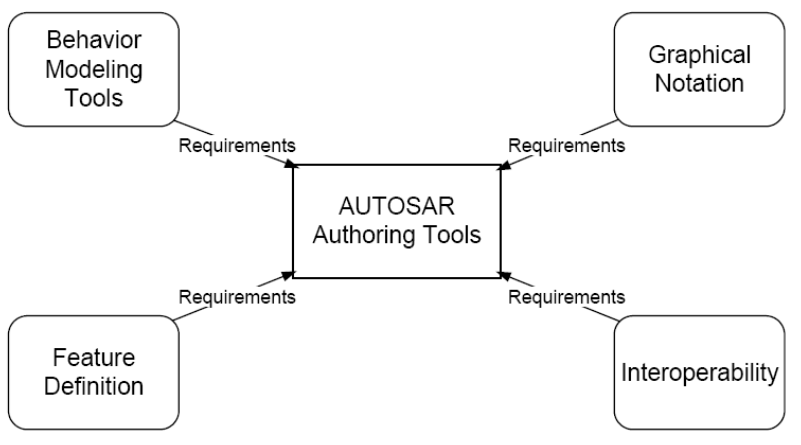
AUTOSAR Authoring Tools 用于设计、配置和生成符合AUTOSAR标准的汽车软件系统的专业工具链.
必需的4类工具:
-
Behavior Modeling Tools(行为建模工具),定义SWC动态行为的专业工具,它们将算法设计与AUTOSAR架构无缝集成
-
Feature Definition(功能定义),对ECU功能需求标准化描述的核心机制,建立从整车功能需求到软件实现的桥梁.
-
Graphic Notation(图形化表示法),可视化描述AUTOSAR软件架构和组件交互的标准符号系统.
-
Interoperability(互操作性),提供不同厂商提供的AUTOSAR软件组件和工具能够无缝协同工作的能力
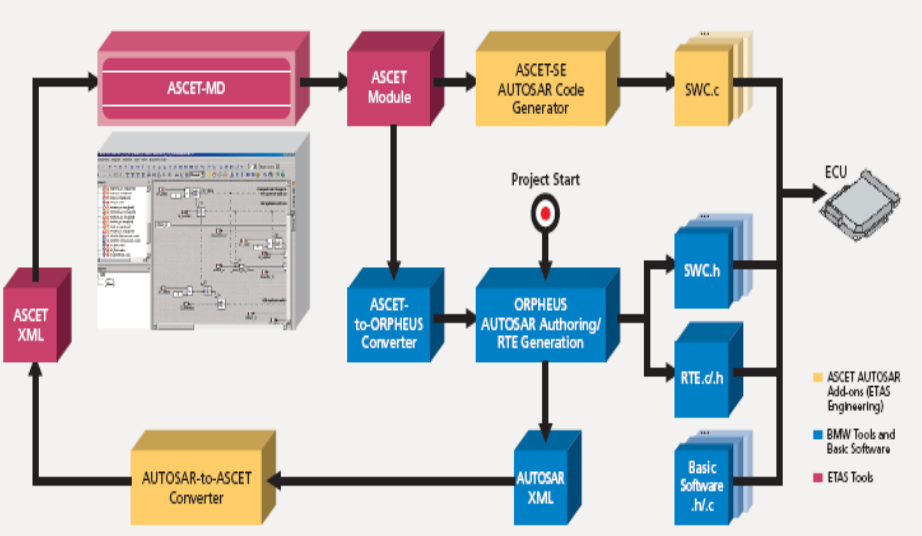
AUTOSAR商用开发、设计工具
目前较大的AUTOSAR商用工具提供商:
- ETAS:ASPECT系列产品
- Mentor Graphics:Volcano系列产品
- Vector:DaVinci系列产品
| 项目 | 工具 |
|---|---|
| 设计网络体系和通信数据的工具 | DaVinci Network Designer CAN & LIN & FlexRay Volcano Network Architect (VNA) ASCET-MD |
| 支持将分布式系统的设计自动转化成代码的工具 | DaVinci Tool Suite Real-Time Workshop Embedded Coder ASCET-SE ORPHEUS |
| 对网络和ECU仿真和测试的工具 | CANoe Volcano FixBox |
| CANopen网络的项目管理工具 | ProCANopen Mentor’s Network Management |
| 数据库工具 | CANdb++ CANdb++ Admin |
ECU从设计到构建、集成的典型过程:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号