tinyrenderer笔记:透视投影
从2D到3D
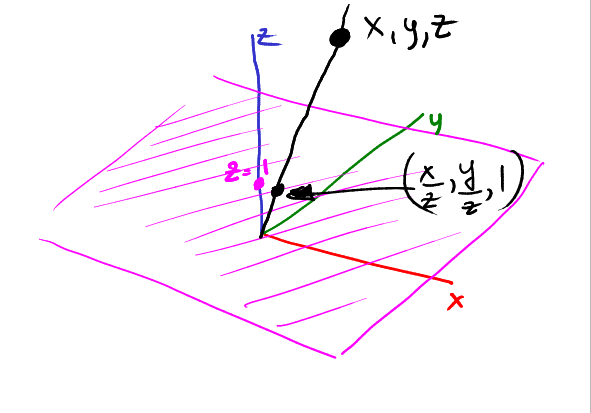
2D点放到平面\(z=1\),得3D点\((\frac{x}{z}, \frac{y}{z},1)\).
如果将3D点投影到2D平面呢?
观察坐标系下,在原点和要投影的点\(P\)之间,画一条直线,然后找到它与平面\(z=1\)的交点\(P'\),即为\(P\)在平面\(z=1\)上的投影点.
2D平面(品红色),3D点\((x,y,z)\)投影得到2D点\((\frac{x}{z},\frac{y}{z})\):
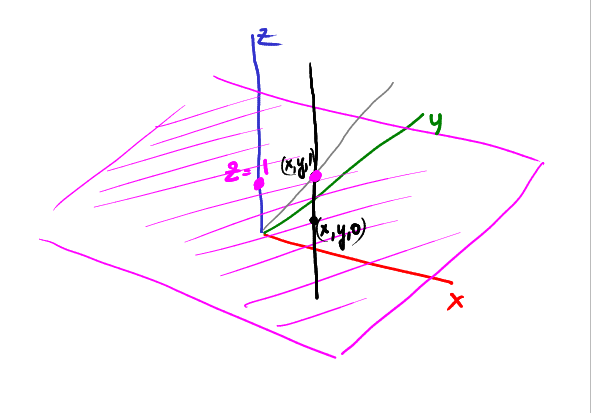
如果过\((x,y,1)\)作一条直线\(//z\)轴,\((x,y,1)\)将投影到哪里?\((x,y)\):
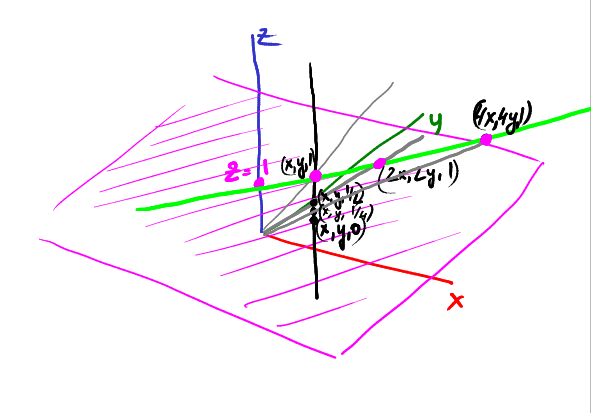
如果过点\((x,y,\frac{1}{2})\)呢?将投影到\((2x,2y)\):

说明:我们最终要投影到的平面是\(z=1\). 对于\((x,y,\frac{1}{2})\),连接其与原点,与平面\(z=1\)的交点,就是投影点\((2x,2y,1)\).
如果过点\((x,y,\frac{1}{4})\)呢?将投影到\((4x,4y)\):
如果继续该过程,接近\(z=0\),那么投影点将远离原点,即\((x,y,0)\)被投影到\((x,y)\)方向上的无穷远处. 此时,\((x,y)\)代表方向,而非投影点.
为什么使用齐次坐标?
齐次坐标允许区分向量和点. 3D空间下,很难区分\((x,y)\)是点,还是方向;但如果使用齐次坐标,所有\(z=0\)的东西都是向量,其余都是点. 例如,\((x,y,0)\)代表\((x,y)\)方向,\((x,y,1)\)代表投影点\((x,y,1)\),\((x,y,2)\)代表投影点\((2x,2y,1)\).
并且遵循计算特性:向量 + 向量 = 向量,点 + 向量 = 点,矢量 - 矢量 = 矢量.
透视投影模型
3D点\((x,y,z)\)用1增广得到4D点\((x,y,z,1)\). 如何逆投影回3D?
例如,做如下仿射变换:
从4D点到3D投影点对应关系:
注:4D点投影到\(w=rz+1\),需要\((x/w,y/w,z/w)\),变成3D点.
3D空间下,在中心投影模型(相机观察模型)中,相机位于z轴\((0,0,c)\),给定点\(P=(x,y,z)\),我们想将P点投影到2D平面\(z=0\),需要求出\(P\to P'\)的变换.
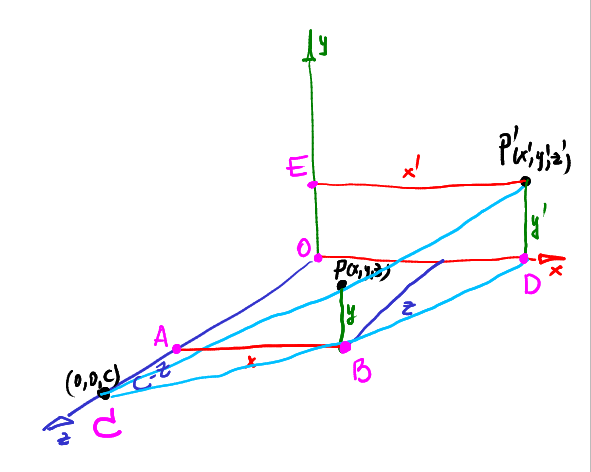
对于\(x\to x'\),
同理(也可由x、y的对称性),对于\(y\to y'\),有
∴可得前面仿射变换\(r=-\frac{1}{c}\)
于是,从\(P(x,y,z)\to P'(x',y',z')\)的变换:
对于投影点\(P'\)在\(CP\)之间的情形,该变换也成立.
比较不同的透视投影模型
之前,我们也有个透视投影模型,对应了一个透视投影变换矩阵,简单描述见计算机图形:mvp变换(模型、视图、投影变换),详细推导见计算机图形:三维观察之投影变换
.
都是透视投影变换,它们有什么区别呢?
为方便描述,之前的模型,简称模型A,这里的模型简称B. 透视投影变换,一定是基于我们的观察模型的.
模型A:
模型B:
不同点:
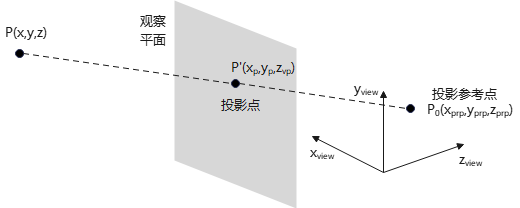
1)投影参考点
模型A,投影参考点位于观察原点\((0,0,0)\),并与相机位置重合;
模型B,投影参考点位于相机\((0,0,c)\);
2)投影平面
模型A,投影到近平面\(z=n\);
模型B,投影到平面\(z=0\);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号