一种同时实现多次采样并减少CPU中断触发次数的方法
背景:我要实现多路AD采样,采样点数多的同时采样次数也需要很多,如果每个AD对应的DMA在传输完成后都触发一次中断,那对于CPU的负荷会比较大,由于需求特殊,故寻找一种能够实现一次总采样只触发一次中断的方法。这个紧跟上一篇随笔,这里引一下:https://www.cnblogs.com/daydaygood/p/18811676
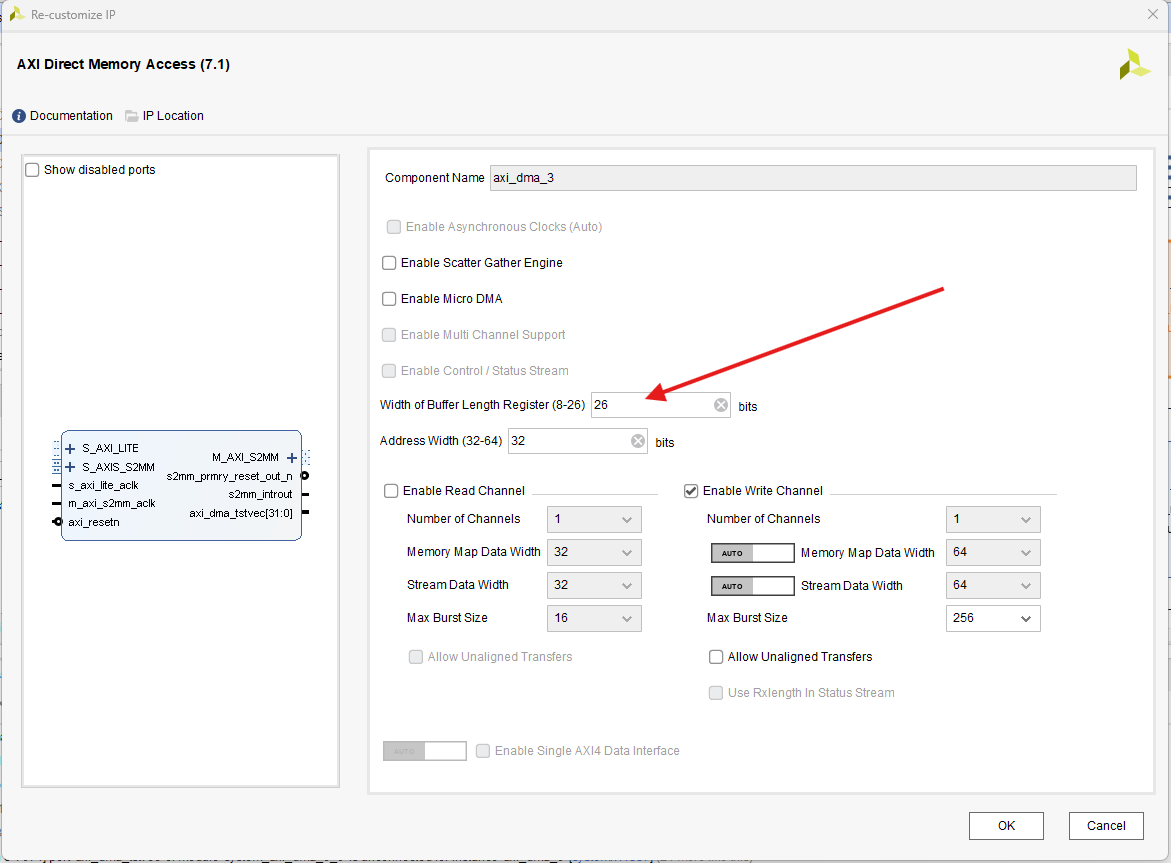
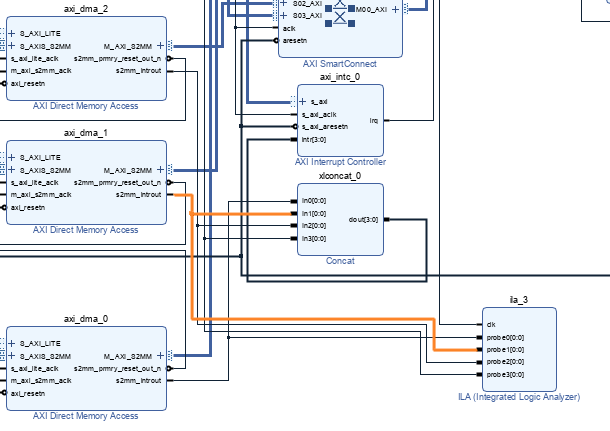
先更改一些IP核的设置,首先,调整DMA核的最大传输字节数,其次把INTC控制器的输入触发全部改成边沿上升沿触发(虽然DMA中断输出是电平触发,但这不影响,我之前没有改,遇到了一些问题,但我改了之后就可以这样做了),输出触发也改为上升沿触发,这里增加一个ila_3来查看每个dma中断输出情况。

重点来了,我们更改一下data_generate的代码,重点是这两部分,首先我们让tlast只在最后一次采样的最后一个数据拉高,其次我们让状态机在多次采样的过程中稳定运行,完整代码在后面,简单来讲,我分四次来传输16384个从1到16384的数据,分四次传输来模拟多次采样。


点击查看代码
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2025/04/04 18:45:06
// Design Name:
// Module Name: data_generate
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
`timescale 1 ns / 1 ps
module data_generate #(
// Users to add parameters here
// User parameters ends
// Do not modify the parameters beyond this line
// Width of S_AXIS address bus. The slave accepts the read and write addresses of width C_M_AXIS_TDATA_WIDTH.
parameter integer C_M_AXIS_TDATA_WIDTH = 64,
// Start count is the number of clock cycles the master will wait before initiating/issuing any transaction.
parameter integer C_M_START_COUNT = 32
)
(
// Users to add ports here
input wire GPIO_start_flag,
// User ports ends
// Do not modify the ports beyond this line
// Global ports
input wire M_AXIS_ACLK,
//
input wire M_AXIS_ARESETN,
// Master Stream Ports. TVALID indicates that the master is driving a valid transfer, A transfer takes place when both TVALID and TREADY are asserted.
output wire M_AXIS_TVALID,
// TDATA is the primary payload that is used to provide the data that is passing across the interface from the master.
output wire [C_M_AXIS_TDATA_WIDTH-1 : 0] M_AXIS_TDATA,
// TSTRB is the byte qualifier that indicates whether the content of the associated byte of TDATA is processed as a data byte or a position byte.
output wire [(C_M_AXIS_TDATA_WIDTH/8)-1 : 0] M_AXIS_TSTRB,
// TLAST indicates the boundary of a packet.
output wire M_AXIS_TLAST,
// TREADY indicates that the slave can accept a transfer in the current cycle.
input wire M_AXIS_TREADY
);
// Total number of output data
localparam NUMBER_OF_OUTPUT_WORDS = 16384;
// function called clogb2 that returns an integer which has the
// value of the ceiling of the log base 2.
function integer clogb2 (input integer bit_depth);
begin
for(clogb2=0; bit_depth>0; clogb2=clogb2+1)
bit_depth = bit_depth >> 1;
end
endfunction
// WAIT_COUNT_BITS is the width of the wait counter.
localparam integer WAIT_COUNT_BITS = clogb2(C_M_START_COUNT-1);
// bit_num gives the minimum number of bits needed to address 'depth' size of FIFO.
localparam bit_num = clogb2(NUMBER_OF_OUTPUT_WORDS);
// Define the states of state machine
// The control state machine oversees the writing of input streaming data to the FIFO,
// and outputs the streaming data from the FIFO
localparam [1:0] IDLE = 2'b00, // This is the initial/idle state
INIT_COUNTER = 2'b01, // This state initializes the counter, once
// the counter reaches C_M_START_COUNT count,
// the state machine changes state to SEND_STREAM
SEND_STREAM = 2'b10; // In this state the
// stream data is output through M_AXIS_TDATA
// State variable
reg [1:0] mst_exec_state;
// Example design FIFO read pointer
reg [bit_num-1:0] read_pointer;
reg [bit_num-1:0] read_pointer_single;
// AXI Stream internal signals
//wait counter. The master waits for the user defined number of clock cycles before initiating a transfer.
reg [WAIT_COUNT_BITS-1 : 0] count;
//streaming data valid
wire axis_tvalid;
//streaming data valid delayed by one clock cycle
reg axis_tvalid_delay;
//Last of the streaming data
wire axis_tlast;
//Last of the streaming data delayed by one clock cycle
reg axis_tlast_delay;
//FIFO implementation signals
reg [C_M_AXIS_TDATA_WIDTH-1 : 0] stream_data_out;
wire tx_en;
//The master has issued all the streaming data stored in FIFO
reg tx_done;
// I/O Connections assignments
assign M_AXIS_TVALID = axis_tvalid_delay;
assign M_AXIS_TDATA = stream_data_out;
assign M_AXIS_TLAST = axis_tlast_delay;
assign M_AXIS_TSTRB = {(C_M_AXIS_TDATA_WIDTH/8){1'b1}};
// Control state machine implementation
always @(posedge M_AXIS_ACLK)
begin
if (!M_AXIS_ARESETN)
// Synchronous reset (active low)
begin
mst_exec_state <= IDLE;
count <= 0;
end
else
case (mst_exec_state)
IDLE:
// The slave starts accepting tdata when
// there tvalid is asserted to mark the
// presence of valid streaming data
//if ( count == 0 )
begin
mst_exec_state <= INIT_COUNTER;
count <= 0;
end
//else
// begin
// mst_exec_state <= IDLE;
// end
INIT_COUNTER:
// The slave starts accepting tdata when
// there tvalid is asserted to mark the
// presence of valid streaming data
if ( count == C_M_START_COUNT - 1 )
begin
mst_exec_state <= SEND_STREAM;
end
else
begin
count <= count + 1;
mst_exec_state <= INIT_COUNTER;
end
SEND_STREAM:
// The example design streaming master functionality starts
// when the master drives output tdata from the FIFO and the slave
// has finished storing the S_AXIS_TDATA
if (tx_done)
begin
mst_exec_state <= IDLE;
end
else
begin
mst_exec_state <= SEND_STREAM;
end
endcase
end
reg GPIO_start_flag_delay;
wire start_flag;
assign start_flag = ((GPIO_start_flag)&&(!GPIO_start_flag_delay));
always @(posedge M_AXIS_ACLK) begin
if (!M_AXIS_ARESETN) begin
GPIO_start_flag_delay <= 1'd0;
end else begin
GPIO_start_flag_delay <= GPIO_start_flag;
end
end
reg wr_en;
always @(posedge M_AXIS_ACLK) begin
if (!M_AXIS_ARESETN) begin
wr_en <= 1'd0;
end else if (start_flag) begin
wr_en <= 1'd1;
end else if (tx_done) begin
wr_en <= 1'd0;
end
end
//tvalid generation
//axis_tvalid is asserted when the control state machine's state is SEND_STREAM and
//number of output streaming data is less than the NUMBER_OF_OUTPUT_WORDS.
assign axis_tvalid = ((wr_en)&&(mst_exec_state == SEND_STREAM) && (read_pointer_single < 4096));
// AXI tlast generation
// axis_tlast is asserted number of output streaming data is NUMBER_OF_OUTPUT_WORDS-1
// (0 to NUMBER_OF_OUTPUT_WORDS-1)
assign axis_tlast = ((read_pointer == NUMBER_OF_OUTPUT_WORDS-1)&&(tx_en));
// Delay the axis_tvalid and axis_tlast signal by one clock cycle
// to match the latency of M_AXIS_TDATA
always @(posedge M_AXIS_ACLK)
begin
if (!M_AXIS_ARESETN)
begin
axis_tvalid_delay <= 1'b0;
axis_tlast_delay <= 1'b0;
end
else
begin
axis_tvalid_delay <= axis_tvalid;
axis_tlast_delay <= axis_tlast;
end
end
//read_pointer pointer
always@(posedge M_AXIS_ACLK) begin
if(!M_AXIS_ARESETN) begin
read_pointer <= 0;
read_pointer_single <= 0;
tx_done <= 1'b0;
end else case (mst_exec_state)
SEND_STREAM :begin
if (tx_en) begin
if (read_pointer < NUMBER_OF_OUTPUT_WORDS-1) begin
read_pointer <= read_pointer + 1;
if (read_pointer_single == 4095) begin
read_pointer_single = 0;
tx_done <= 1'b1;
end else begin
read_pointer_single <= read_pointer_single + 1;
tx_done <= 1'b0;
end
end else begin
read_pointer <= 0;
read_pointer_single <= 0;
tx_done <= 1'b1;
end
end
end
default: begin
read_pointer <= read_pointer;
read_pointer_single <= 0;
tx_done <= 1'b0;
end
endcase
end
//FIFO read enable generation
assign tx_en = M_AXIS_TREADY && axis_tvalid;
// Streaming output data is read from FIFO
always @( posedge M_AXIS_ACLK )
begin
if(!M_AXIS_ARESETN)
begin
stream_data_out <= 1;
end
else if (tx_en)// && M_AXIS_TSTRB[byte_index]
begin
stream_data_out <= read_pointer + 32'b1;
end
end
// Add user logic here
// User logic ends
endmodule
编译后我们去vitis里,编写main程序,代码如下,其实就是,让data_generate分时产生四次数据,同时记录中断情况,来查看该方案是否可行。
点击查看代码
#include "my_init.h"
#include "my_intr.h"
#include "my_code.h"
#include "globals.h"
int main( ){
Xil_ICacheEnable();
Xil_DCacheEnable();
xil_printf("\r\n--- Entering main() --- \r\n");
// 1.4个DMA以及GPIO初始化
dma_init_for_four_adc_dma(&axi_dma_0, &axi_dma_1, &axi_dma_2, &axi_dma_3,&dma_channels[0], &dma_channels[1],&dma_channels[2],&dma_channels[3]);
GPIO_init(&Gpio);
// 2.初始化 XScuGIC、Interrupt_Controller、注册异常以及建立中断系统
my_setup_XScuGic_init(&intc);
my_Interrupt_Controller_init(&InterruptController, &intrcontext[0], &intrcontext[1], &intrcontext[2], &intrcontext[3],
&dma_channels[0], &dma_channels[1], &dma_channels[2], &dma_channels[3]);
my_Exception_start();
setup_interrupts(&intc, &InterruptController);
// 3.开启其他中断
platform_enable_interrupts(&intc, &InterruptController, &dma_channels[0], &dma_channels[1], &dma_channels[2], &dma_channels[3]);
dma_receive_for_four_adc_data();
for (int i = 0; i < 4; i++)
{
sleep(1);
xil_printf("\r\n--- %d --- \r\n",i);
XGpio_DiscreteWrite(&Gpio, 1, 0x1);
sleep(1);
XGpio_DiscreteWrite(&Gpio, 1, 0x0);
}
dma_receive_for_four_adc_data();
for (int i = 0; i < 4; i++)
{
sleep(1);
xil_printf("\r\n--- %d --- \r\n",i);
XGpio_DiscreteWrite(&Gpio, 1, 0x1);
sleep(1);
XGpio_DiscreteWrite(&Gpio, 1, 0x0);
}
dma_receive_for_four_adc_data();
for (int i = 0; i < 4; i++)
{
sleep(1);
xil_printf("\r\n--- %d --- \r\n",i);
XGpio_DiscreteWrite(&Gpio, 1, 0x1);
sleep(1);
XGpio_DiscreteWrite(&Gpio, 1, 0x0);
}
//开始循环
return XST_SUCCESS;
}
串口打印信息情况。

数据传输情况。

ila观察到的中断情况。

那这个方法呢,其实只是减少了中断触发次数,在DMA总线中可能会产生抢占行为,如下图,单路传输的时候,总线上就一个dma,多路dma的时候,就会微观上分时传输,这并不是很好,具体还要看实际情况。



 浙公网安备 33010602011771号
浙公网安备 33010602011771号