
【AUTOSAR】V知-AUTOSAR快速入门
目录
ECU软件分类
基础软件 BSW
- 类似windows/Linux的操作系统
应用软件 ASW or application
- 在基础软件之上,并通过基础软件和硬件交互
- 控制ECU运行的功能
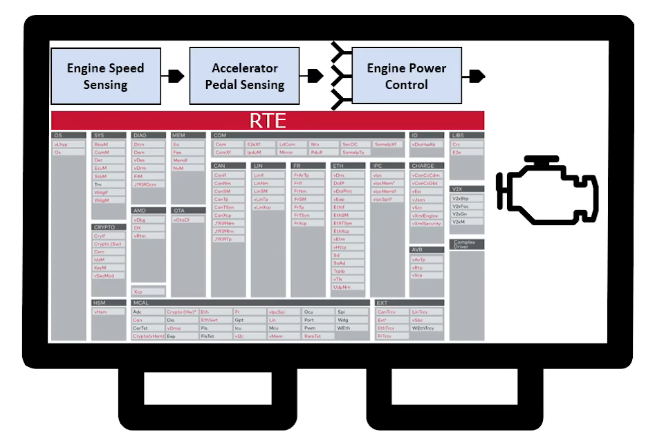
RTE (run time environment)
- 作为 BSW 和 ASW 交互的桥梁,为 软硬件解耦 提供了可能
- RTE 实现了软件组件之间、基础软件之间、软件组件与基础软件之间的通信
- RTE封装了基础软件层的通信和服务
- 为应用层软件组件提供了标准化的基础软件和通信接口
- 使得应用层可以通过RTE接口函数调用基础软件的服务
- RTE 抽象了ECU之间的通信
- RTE通过使用标准化的接口,将其统一为软件组件之间的通信
- 由于RTE的实现与具体ECU相关,所以必须为每个ECU分别实现
AUTOSAR
ECU开发标准化的必要性
- 汽车开发的标准化:
- 除了诊断和标定,其他都不太统一;
- ECU开发没有统一标准,迁移困难
AUTOSAR的不同含义
- AUTOSAR开发搭档:
- development partnership
- AUTOmotive Open System ARchitecture开发搭档
- 一种用于汽车电子系统的开放式架构,允许不同厂商的硬件和软件组件相互兼容和互操作
- 由汽车制造商和主要供应商成立工作组,为ECU软件开发一套标准规范
- AUTOSAR规范和软件:
- 规范首发于2005年,首项目于2006
- AUTOSAR也指符合规范的软件,eg.AUTOSAR Classic 4.3
- AUTOSAR方法论:
- 定义了过程(开发流程)、工具、(工具使用的)文件格式
- AUTOSAR文件格式:AUTOSAR XML,简称ARXML
AUTOSAR软件结构
分层结构
- 整个AUTOSAR都是基础软件,是堆栈的结合体
- 每个区域都可以细分为模块,每个模块都定义了功能和接口
- 即AUTOSAR的关注点分离
- AUTOSAR Classic Platform有超过100个模块
![]()
![]()


AUTOSAR版本:
- 4.4后,从X.Y变为A-B,A年份,B月份
- AUTOSAR Classic Platform / AUTOSAR Adaptive Platform
AUTOSAR方法论简化版
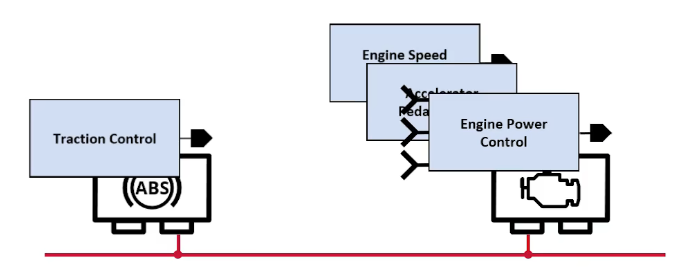
- AUTOSAR做什了么:
- 定义 功能 及 交互
- 描述每个功能所需的SWC (software component 软件组件)
- 将 SWC 分配给 ECUs,并描述网络如何将它们连接起来
- 系统描述(system description)
- 即:定义软件组件,分配给ECU,添加网络
- 每个软件组件只与RTE通信
- 所有的数据共享都通过RTE实现
- 从而拥有可移植的应用程序。
- 小结为:
- AUTOSAR向下实现了ECU的软硬件解耦
- 通过无数接口连接ECU,构建一个标准化RTE环境,让ECU数据在这一层共享
- 开发者只需要描述应用,就能实现新功能的开发
![]()
![]()
AUTOSAR Adaptive platform
嵌入式软件工程的运行方式:
- 在ECU内部,以软件形式存在的功能或任务按照预定的调度表周期性运行
- 这意味着,任务task 按照 调度表schedule 周期性运行
- IO: 当任务运行时,检查相关输入,并根据输入控制输出。
- deadline:任务必须在规定时间内执行
- 任务调度表和截止时间通常以 ms毫秒 为单位
- 电机:微秒us 为单位
- 任一项任务超时,将导致所有任务超时
- 硬实时:hard real-time
- 通过可预测的执行来满足严格时间限制的需求
- 硬实时行为:意味着没有任务可以错过deadline
- AUTOSAR可用来帮助实现 硬实时
- 此外需要做的:调度表和高效编程等,以确保满足deadline
ACES:
- 自动驾驶,互联(物联网),电气化(新能源),共享(共享汽车和共享数据)
- OTA是互联、共享的一部分
![]()

HCP与ACES:
- HCP是高性能计算平台,为汽车提供ACES功能
- HCP软件运行在POSIX环境,如linux
- 运行AUTOSAR CP的ECU
- AUTOSAR CP提供硬实时行为
- ACES处于更上一层,通过动态的面向服务的通信提供其他功能
![]()

AUTOSAR两种平台
- 简称为AUTOSAR CP/AP
不同功能需求:
- AP:为满足未来汽车所需的ACES功能需求提供算力
- CP:将继续存在于汽车中,以满足ACES功能以外的硬实时需求。
不同的操作系统状态:
- AP:依赖POSIX操作系统
- CP:本身包含操作系统
不同的应用程序运行状态:
- AP:应用程序作为独立进程运行
- 可以动态加载/卸载,动态安装/删除,无需重启
- 可以单独对每个应用程序做任何事
- CP:必须完全停止所有应用程序 (软件)
- 例如传统的ECU软件更新 (FBL),
- 所有应用程序全部停止后,Bootloader接管权限并刷写
不同的base和语言
- AP:
- 基于面向服务的通信 和 面向对象的语言(C++)
- 为应用程序访问提供ARA
- 允许使用高级功能库,如ACES所需的目标识别
- CP:
- 基于信号/服务的通信 和 面向过程的语言(C)
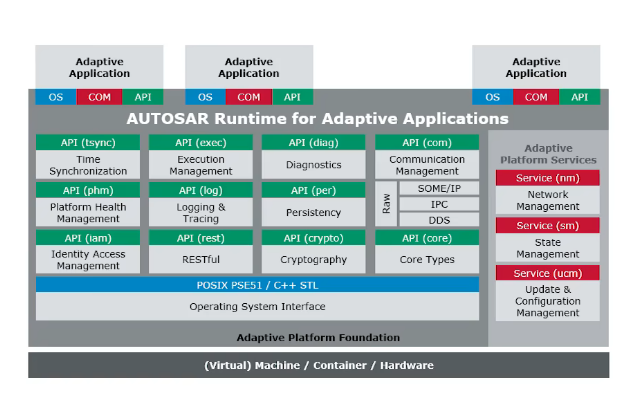
不同的运行时:RTE和ARA
- CP:应用程序运行在RTE之上
- AP:
- 定义了API,应用程序通过API访问HCP中的功能集群以及AP服务
- API和AP服务:为应用程序提供AUTOSAR运行时(ARA)
- ARA由可以访问功能集群的API和Adaptive平台服务组成
不同的platform:
- CP:定义了超过100个模块,包括行为,彼此交互通信等
- AP:只规定了API
功能平台和功能集群 functional platform/cluster
- 功能集群:一组相关的功能
- 例如访问网络数据(收发数据)
- 在本地保存和检索数据(persistence)
- 当出现问题时执行内部记录(日志logging)
- 平台服务:
- 提供一种标准化的方式来访问AUTOSAR AP提供的功能
![]()
- 提供一种标准化的方式来访问AUTOSAR AP提供的功能

 浙公网安备 33010602011771号
浙公网安备 33010602011771号