
【V知】汽车电子-从零开始的知识拼图-1基础构建
从零开始的知识拼图
- 小白扫盲式快速科普
- jigsaw puzzle:拼图游戏
![]()

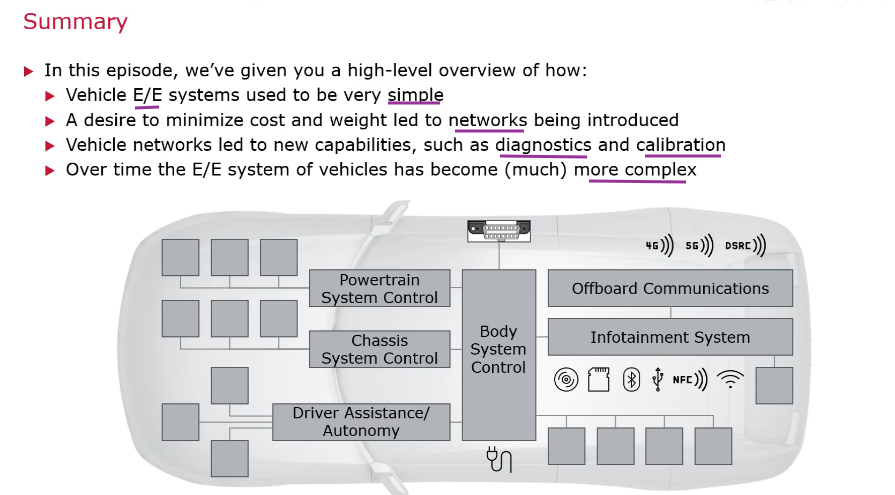
E/E系统的前世今生
- E/E系统:电子电气
- 汽车系统:从没有E/E,到引入ECU并逐渐增多,到ECU通信,交互,网络引入,诊断、标定、智能化等
![]()
ECU
- 概念:
- ECU: electronic control unit 电子控制单元
- HCP: high-performance computing platform,高性能计算平台,汽车的新一代ECU
- MCU: microcontroller
- control: 控制
- 一门工程学科,目的是达到期望的性能水平,通常通过应用规则实现。
- 规则:how/when -- works;转换值(车轮转速换算为车速)
- 各种小的控制系统集成在一起:ECU
- 认识ECU:
- I/O:
- 输入:特殊硬件,可以将电信号(电压或电流)转换成数字信号
- 输出:特殊的输出电路,可以接收数字信号,并产生电流或施加电压,使车辆发生变化
- 共享数据:
- 使用网络(总线),和其他ECU共享(数字化)数据
- I/O:
- ECU硬件:
- ECU内部图示,所有电子连接都通过接插件(PIN)
![]()
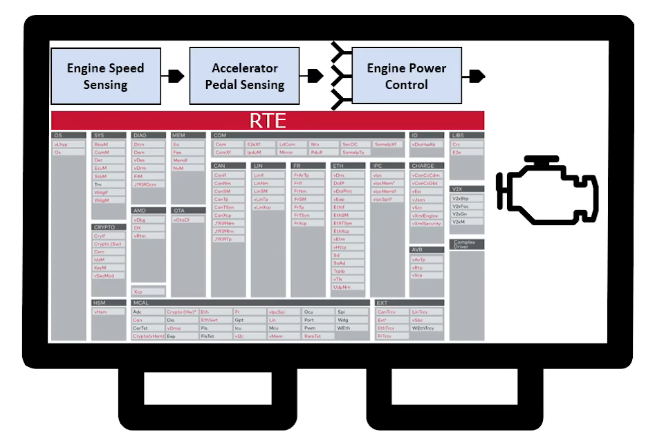
- ECU软件:
- 基础软件 BSW:
- 类似windows/Linux的操作系统
- 应用软件 ASW or application:
- 在基础软件之上,并通过基础软件和硬件交互
- 控制ECU运行的功能
- RTE(run time environment):
- 存储运行时常用数据,如车速、各种温度等,防止重复计算
- 作为 BSW 和 ASW 交互的桥梁,为 软硬件解耦 提供了可能
- RTE 实现了软件组件之间、基础软件之间、软件组件与基础软件之间的通信
- RTE封装了基础软件层的通信和服务
- 为应用层软件组件提供了标准化的基础软件和通信接口
- 使得应用层可以通过RTE接口函数调用基础软件的服务
- RTE 抽象了ECU之间的通信
- RTE通过使用标准化的接口,将其统一为软件组件之间的通信
- 由于RTE的实现与具体ECU相关,所以必须为每个ECU分别实现
- 基础软件 BSW:

汽车网络的来源
- 网络在汽车中的作用:
- 可以减少线束
- 网络协议允许ECU快速、精准地共享数据,降低未检测到错误的风险
- 抗干扰:发动机的点火系统会产生电子干扰,可能会影响敏感的电子设备
- 数字信号可以自动检查和纠正某些故障(错误)
- E/E系统中,ECU通过网络实行串行通信
- 串行通信:只有一个"流stream",一次只做一件事
- 实现:网络/线束上的电压 --> 二进制0/1
- 不同类型的网络:
- CAN: 1 Mbps,如今还在广泛使用中
- LIN: 20 kbps,CAN成本高时的低速、便宜的选择
- FlexRay:10 Mbps,比CAN更快的超高速、实时网络
- Ethernet以太网:100Mbps,海量数据,高速
- 首先用于娱乐系统:音频、视频等
- ADAS系统:海量的视频、雷达、激光雷达数据
- based on:
- 基于信号:CAN/LIN/FlaxRay
- 将信号发送到网络上,不管是否有ECU需要
- 面向服务的架构(SOA):以太网
- 需求方 向 提供方 发送请求,从而获得数据
- “临时性网络”,可以更容易添加新功能
- 基于信号:CAN/LIN/FlaxRay
- 不同网络:通过网关连接在一起
- 网关:从一个网络中选择数据,并将其转发到另一个网络中
汽车诊断
- 医生问诊 到 ”汽车问诊“
- requests and responses
- 汽车诊断标准化:
- OBD标准化问答
- UDS, ISO 14229-1 (Unified Diagnostic Services)
- 定义了requests/responses的结构
- 但由 汽车供应商 定义结构中具体的内容
- SAE J1939:
- 另一套标准,供卡车、挖掘机、公路机械、农用车辆等的诊断使用
- 诊断的功能:
- 诊断能做的事情:
- 读数据(序列号、零部件号、SW version等)/写数据;
- 读/复写ECU IO,来查问题;
- 运行某特殊功能:如打开付费功能、查特殊情况下的问题等。
- 诊断的重要性:
- 诊断涵盖了车辆生命周期中的大部分过程,以及大量数据
- 诊断设计时,需要考虑很多事情:
- 可能的故障、用到的数据、汽车生产时想做的事情;
- 诊断对硬件设计和软件设计的影响都很大
- 诊断能做的事情:
- 故障存储/DTC
- 故障存储 Fault Memory: ECU存储检测到的故障
- 诊断故障代码 DTC(Diagnostic Trouble Codes)
- ECU在诊断中做了什么:
- ECU的诊断功能由基础软件和应用程序提供:
- BSW:负责网络连接和故障存储;
- ASW:监控功能,以及其他需要的功能
- BSW接收诊断请求,然后发送诊断回复;
- 诊断实现需要ECU的硬件支持;
- ECU升级软件:
- 用到USD,以及ECU软件中的一个特殊部分--FBL(flash Bootloader)
- ECU的诊断功能由基础软件和应用程序提供:
汽车标定
- 标定
- 一般标定:
- 将测量值与标准值进行比较的行为
- 比较,但不包括任何的后续调整
- 车载开发中的标定:
- 默认包括调整的,一般称为"测量与标定"
- 观察测量值,并进行调整
- 一般标定:
- 标定的作用:
- 汽车生产的平台化:
- 为每个车型开发独立组件是非常昂贵的
- 不同相似车型,通过平台化实现设计和工程的共享,保证主要部件在多个车型通用
- 不同车型:需要个性化设置某些参数等
- 汽车生产的平台化:
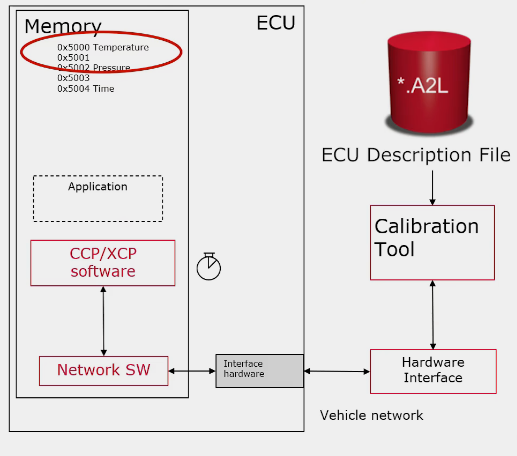
- 标定协议:
- CCP: CAN Calibration Protocol
- XCP: Universal Calibration Protocol
![]()
- 标定实现:
- 示例1-测量ECU内存的方法
- 标定工具发送信息,CCP指向一个地址,从memory获取数据后,传回标定工具;
- ECU的定时器:可以实现将数据重复传送给标定工具。
- 其他功能:通过标定工具修改memory中的数据,等。
![]()
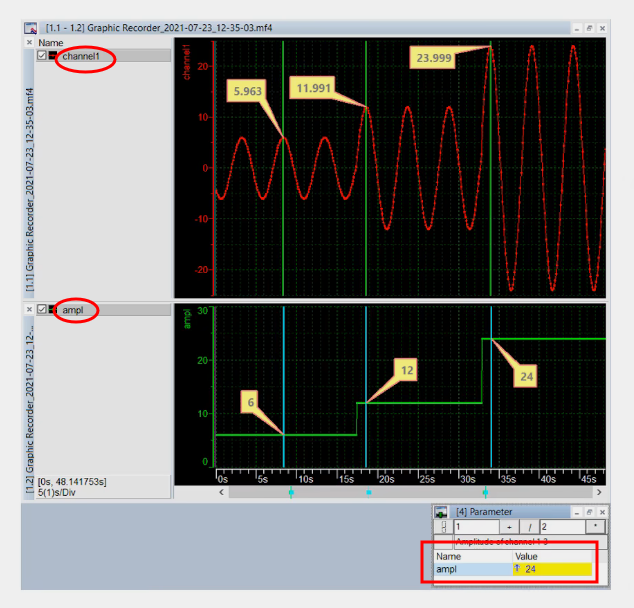
- 示例2-通过振幅改变正弦波的值
- 在窗口中写入不同的ampl值,将其写入ECU,观察正弦波的值的变化
![]()
- 在窗口中写入不同的ampl值,将其写入ECU,观察正弦波的值的变化
- 示例1-测量ECU内存的方法

AUTOSAR
- ECU开发标准化的必要性:
- 汽车开发的标准化:除了诊断和标定,其他都不太统一;
- ECU开发没有统一标准,迁移困难
- AUTOSAR的不同含义:
- AUTOSAR开发搭档:
- development partnership
- AUTOmotive Open System ARchitecture开发搭档
- 一种用于汽车电子系统的开放式架构,允许不同厂商的硬件和软件组件相互兼容和互操作
- 由汽车制造商和主要供应商成立工作组,为ECU软件开发一套标准规范
- AUTOSAR规范和软件
- 规范首发于2005年,首项目于2006
- AUTOSAR也指符合规范的软件,eg.AUTOSAR Classic 4.3
- AUTOSAR方法论
- 定义了过程(开发流程)、工具、(工具使用的)文件格式
- AUTOSAR文件格式:AUTOSAR XML,简称ARXML
- AUTOSAR开发搭档:
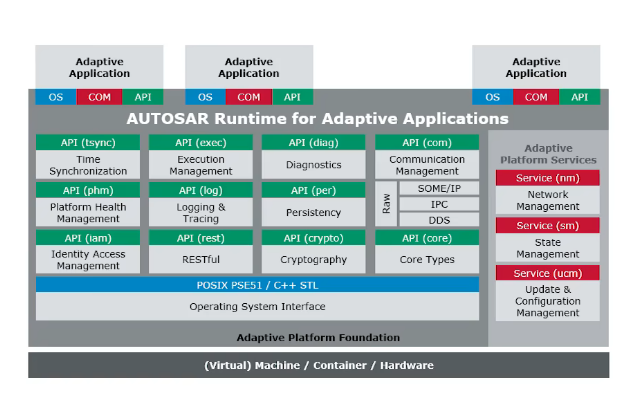
- AUTOSAR软件结构
- 分层结构
- 整个AUTOSAR都是基础软件,是堆栈的结合体
- 每个区域都可以细分为模块,每个模块都定义了功能和接口,即AUTOSAR的关注点分离
- AUTOSAR Classic Platform有超过100个模块
![]()
![]()
- 版本:
- 4.4后,从X.Y变为A-B,A年份,B月份
- AUTOSAR Classic Platform / AUTOSAR Adaptive Platform
- 分层结构
- AUTOSAR方法论简化版:
- 定义 功能 及 交互
- 描述每个功能所需的SWC (software component)
- 将SWC分配给ECUs,并描述网络如何将它们连接起来
- 系统描述(system description)
- 即:定义软件组件,分配给ECU,添加网络
- 每个软件组件只与RTE通信
- 所有的数据共享都通过RTE实现
- 从而拥有可移植的应用程序。
- 小结为:
- AUTOSAR向下实现了ECU的软硬件解耦
- 通过无数接口连接ECU,构建一个标准化RTE环境,让ECU数据在这一层共享
- 开发者只需要描述应用,就能实现新功能的开发
![]()
![]()


更新ECU软件
- ECU软件组成:
- 前面介绍过的:基础软件、RTE、应用程序
- FBL(Flash Bootloader): 特殊软件,启动/重启ECU;更新软件
- 大多数情况下:FBL检查ECU软件主程序,并跳转到主程序 (ECU开始运行)
- 很少的情况下:刷写ECU软件
- ECU刷写的必要性:
- 开发过程中的刷写:功能变更或引入新功能,或者标定参数的修改
- 车辆销售后的刷写:修复bug等
- FBL和刷写工具一起提供了通过车载网络修复问题软件的能力,而无需取出ECU
![]()
- FBL刷写
- ECU软件存储在NVM(非易失性内存)中:
- NVM不会在ECU断电时丢失数据
- FBL提供诊断服务:
- 允许整个NVM被擦除和重写(刷写),可以通过车载网络实现
- FBL会对写入NVM的数据进行确认 verify
- FBL刷写时会擦除NVM中的数据:
- 需要先将数据读取并存储,然后再写回,否则存储的数据会丢失(如配置数据等)
- 需要在刷写前跳转至FBL
- ECU主程序在运行过程中不能进行软件刷写
- ECU在刷写时会处于异常状态:原则上不能一边开车、一边进行ECU刷写
- 内存驱动程序:
- 对NVM进行操作的软件
- 并不是FBL的一部分,而是在刷写过程中下载到ECU中
- ECU软件存储在NVM(非易失性内存)中:
- FBL刷写的鲁棒性
- FBL必须按照规定的顺序执行,如果顺序不对,ECU会变板砖。
- 板砖修复:需要把ECU拆下来,换一个新的,非常贵。
- 鲁棒性很重要:汽车制造商会定义精确的顺序、数据格式、及其他要求。
- FBL规范实际上是汽车制造商的私有规范。
- 刷写时需要满足一些稳定的条件:
- 保持电压稳定:如果电压不稳定,FBL将拒接刷写请求
- 其他:车辆静止;变速箱处于P档位等。
- FBL必须按照规定的顺序执行,如果顺序不对,ECU会变板砖。
- OTA: Over-The-Air updates
- 对车辆(ECU)进行远程刷写
- 为保证OTA的鲁棒性,ECU需要使用冗余的存储空间:2倍或3倍的存储空间
- 轮流对2个存储空间进行刷写:
- 假设有2个存储空间:空间1负责运行程序,空间2进行刷写
- 空间2失败也没关系;可以在空间1运行时刷写空间2;
- 当空间2刷写完成并通过验证,则进入激活状态,并在ECU启动时被使用
- 下一次刷写时,将对空间1进行刷写
- 注:以上在后台或MCU上进行。
- 假设有2个存储空间:空间1负责运行程序,空间2进行刷写
- 不同的OTA策略:
- OTA时,经常需要最小化传输的数据,可以节约成本;当把内存驱动程序放在FBL时则需要更多空间
- 不同OTA策略:
- 或不要求FBL包含内存驱动程序;
- 或不需要冗余存储
- FBL的其他功能:提高刷写速度、防止软件被篡改
- 允许管道刷写 pipeline program:即对NVM进行写操作的同时接收数据
- 传统的FBL:从网络获取数据并存储在本地,当一组数据完成接收后,开始写操作;
- 写操作完成后,传送下一组数据。
- 允许管道验证 pipeline verification:在接收数据或者将数据写入NVM的同时进行验证
- 传统验证:在所有数据的写操作完成之后,进行验证
- 实时解压缩 live-decompression:
- 进一步加速,将数据压缩后传给FBL
- FBL实时解压缩,将接收到的压缩数据解压缩后写入NVM
- 身份验证 authentication:
- 为保护刷写过程,进行身份验证,防止未经授权的软件更新。
- 实时解密 live-decryption:
- 防止他人窥探或监视更新包,试图对更新包进行逆向工程,找出其中的内容
- 将加密数据传输给FBL,FBL在将数据写入NVM之前进行实时解密
- 安全启动 secure boot:
- 计算主程序的签名,并将其存储在ECU内的安全存储中
- ECU每次启动时,都会重新计算签名并进行对比,判断软件是否被篡改;如被篡改,ECU将阻止启动。
- (以上几点也是vector可以提供的一些高级刷写服务)
- 允许管道刷写 pipeline program:即对NVM进行写操作的同时接收数据

HPC
- 高性能计算机:high-performance computing platform, HCP or HPC
- 必要性:满足 以数据为中心的处理需求
- 汽车发展方向是自动化,终极目标是基于评估车辆环境的能力的自动驾驶
- 这就需要并行执行,以及快速处理大量数据
- 例如:根据来自雷达、摄像头、视频流等的数据,进行识别和预测
- HPC:
- 利用硬件实现并行处理/执行,以及高宽带网络与动态通信的结合
![]()
- 利用硬件实现并行处理/执行,以及高宽带网络与动态通信的结合
- 必要性:满足 以数据为中心的处理需求
- 以数据为中心的处理需求 Data-centric processing
- 某些常见的车辆环境可能需要非常快速的数据评估
- 当需要快速处理大量数据时的硬件要求:
- 需要连接到高宽带网络(如以太网),以便收发数据
- 需要大内存,以便处理数据时保存数据
- 可能需要GPUs来处理数据:Graphics Processing Units
- GPU将任务分成数千个部分,然后并行执行
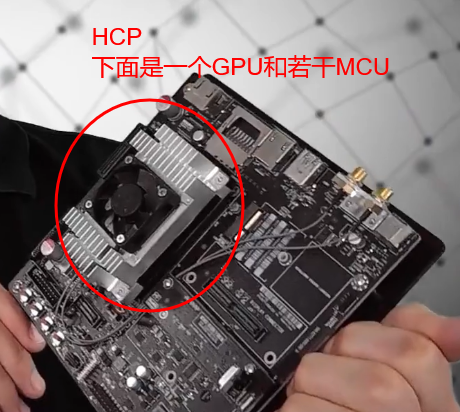
- HCP开发板展示:
- 更高速的网络接口:千兆以太网,比ECU快十倍
- 更多的核:GPU有256个核,ECU只有一个单核
- 更大的内存:HPC 8G存储,支持每秒50G读写,ECU只有几百k
- 更少的输入/输出接口:20个IO口(ECU有70个IO)
![]()
- 处理更复杂的数据环境:
- 当处理涉及到车辆环境的数据时,信号会变得复杂
- 需要与很多不同 objects的不同属性 进行通信
- 动态的、面向服务的通信
- ECU仍需存在的意义
- 不同需求:以数据为中心的处理需求 or 以硬件为中心的处理需求
- ECU的优势:
- 针对处理简单数据/简单任务进行优化的,优势在于处理传感器和执行器
- 以硬件为核心,为软件提供与汽车硬件交互的方式,例如开关、灯等
- ECU不会被完全取代:
- 一辆汽车可以同时拥有HCP和许多ECU
- POSIX:
- IEEE标准,Linux兼容POSIX标准
- HCP软件:运行在POSIX环境
- AUTOSAR Adaptive Platform能够在POSIX操作系统上运行
- ps: ECU使用AUTOSAR Classic Platform

AUTOSAR Adaptive platform
- 嵌入式软件工程的运行方式:
- 在ECU内部,以软件形式存在的功能或任务按照预定的调度表周期性运行
- 这意味着,任务task 按照 调度表schedule 周期性运行
- IO: 当任务运行时,检查相关输入,并根据输入控制输出。
- deadline:任务必须在规定时间内执行
- 任务调度表和截止时间通常以 ms毫秒 为单位
- 电机:微秒us 为单位
- 任一项任务超时,将导致所有任务超时
- 硬实时:hard real-time
- 通过可预测的执行来满足严格时间限制的需求
- 硬实时行为:意味着没有任务可以错过deadline
- AUTOSAR可用来帮助实现 硬实时
- 此外需要做的:调度表和高效编程等,以确保满足deadline
- 在ECU内部,以软件形式存在的功能或任务按照预定的调度表周期性运行
- ACES:
- 自动驾驶,互联(物联网),电气化(新能源),共享(共享汽车和共享数据)
- OTA是互联、共享的一部分
![]()
- HCP与ACES:
- HCP是高性能计算平台,为汽车提供ACES功能
- HCP软件运行在POSIX环境,如linux
- 运行AUTOSAR CP的ECU
- AUTOSAR CP提供硬实时行为
- ACES处于更上一层,通过动态的面向服务的通信提供其他功能
![]()
- AUTOSAR两种平台
- 简称为AUTOSAR CP/AP
- 不同功能需求:
- AP:为满足未来汽车所需的ACES功能需求提供算力
- CP:将继续存在于汽车中,以满足ACES功能以外的硬实时需求。
- 不同的操作系统状态:
- AP:依赖POSIX操作系统
- CP:本身包含操作系统
- 不同的应用程序运行状态:
- AP:应用程序作为独立进程运行
- 可以动态加载/卸载,动态安装/删除,无需重启
- 可以单独对每个应用程序做任何事
- CP:必须完全停止所有应用程序 (软件)
- 例如传统的ECU软件更新 (FBL),
- 所有应用程序全部停止后,Bootloader接管权限并刷写
- AP:应用程序作为独立进程运行
- 不同的base和语言
- AP:
- 基于面向服务的通信 和 面向对象的语言(C++)
- 为应用程序访问提供ARA
- 允许使用高级功能库,如ACES所需的目标识别
- CP:
- 基于信号/服务的通信 和 面向过程的语言(C)
- AP:
- 不同的运行时:RTE和ARA
- CP:应用程序运行在RTE之上
- AP:
- 定义了API,应用程序通过API访问HCP中的功能集群以及AP服务
- API和AP服务:为应用程序提供AUTOSAR运行时(ARA)
- ARA由可以访问功能集群的API和Adaptive平台服务组成
- 不同的platform:
- CP:定义了超过100个模块,包括行为,彼此交互通信等
- AP:只规定了API
- 功能平台和功能集群 functional platform/cluster
- 功能集群:一组相关的功能
- 例如访问网络数据(收发数据)
- 在本地保存和检索数据(persistence)
- 当出现问题时执行内部记录(日志logging)
- 平台服务:
- 提供一种标准化的方式来访问AUTOSAR AP提供的功能
![]()
- 提供一种标准化的方式来访问AUTOSAR AP提供的功能
- 功能集群:一组相关的功能


汽车E/E系统发展历程
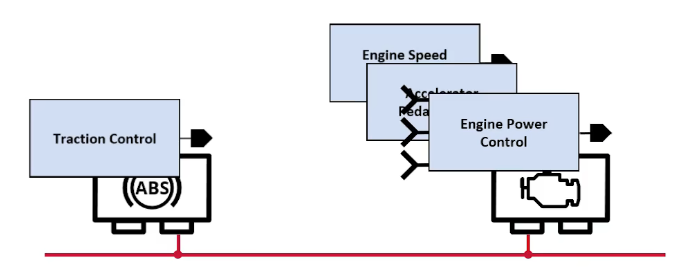
- 到1990s:
- 从没有ECU,到加入ABS,到加入简单ECU控制牵引力等,到引入CAN总线
![]()
- 从没有ECU,到加入ABS,到加入简单ECU控制牵引力等,到引入CAN总线
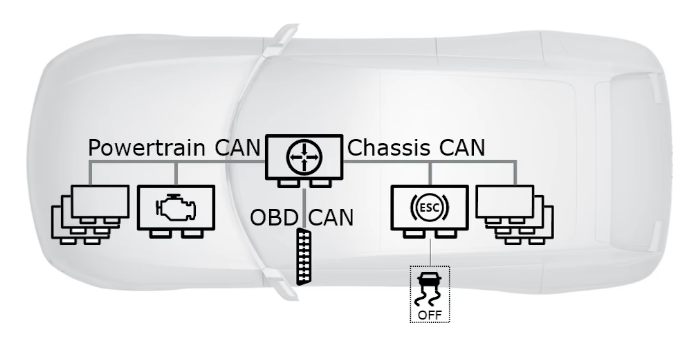
- 到early 2000s:20世纪早期
- 可以连接到单条CAN总线上的数量有限--引入网关
- 网关:将单条CAN总线变为多条,从而减少单条总线上的ECU和数据量
- 网关的作用:在不同网络/总线之间传输路由数据
![]()
- 网关的作用:在不同网络/总线之间传输路由数据
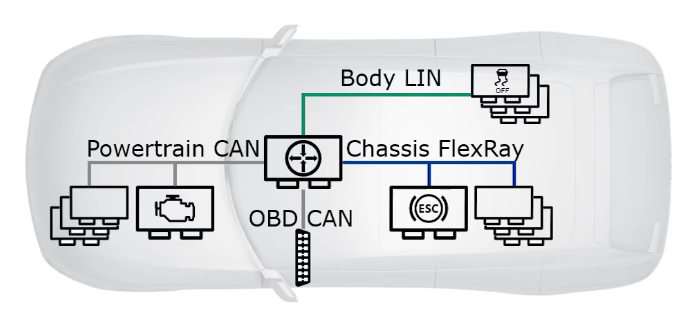
- 到20世纪中期:
- 新的ECU和新的总线出现
- 如:FlexRay用于高级底盘控制,包括电子悬架控制和电控转向
- 如:LIN用于智能组合开关,牵引力开关等
![]()
- 新的ECU和新的总线出现
- 到20世纪末:
- 许多ECU开始使用AUTOSAR CP
![]()
- 许多ECU开始使用AUTOSAR CP
- 到2010s初:
- 触摸屏出现,娱乐系统,图片、动画等
- 以太网出现:缩短软件更新时间,提高视频等传输速度
- DoIP(Diagnostics over Internet Protocol):缩短下载时间
- OBD法规要求:保留CAN,即使以太网诊断速度更快
![]()
- 小结前期的E/E系统
- 越来越依赖网络通信,使软件更容易共享数据
- 汽车网络:通过数据共享获得新能力的推动者
- 不同的汽车网络(CAN/LIN/FlexRay/以太网)为汽车E/E提供所需的功能
- 到2010s的中后期:
- 开发混合动力汽车,需要传输更多数据
- FlexRay和多条CAN总线组成的系统已经达到极限
- 以太网出现,网关变为多层交换机
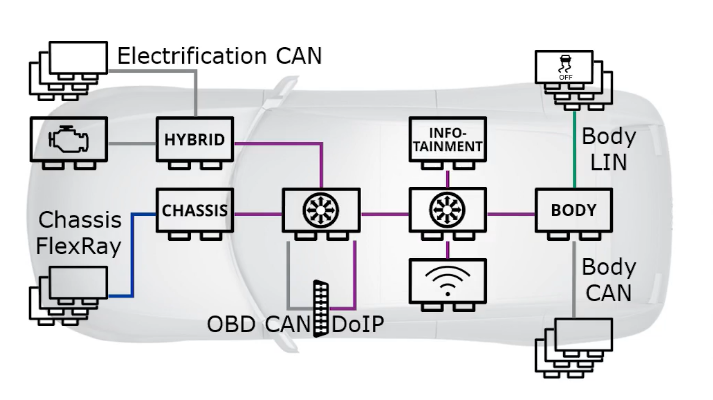
- 若干独立的功能被集成到更大的执行平台上,即(功能)域控制器
- 域控制器:通过以太网连接到交换机
- 以太网成为系统的骨干网络:
- 通过以太网连接多个交换机的级联交换机架构
- 功能转移到域控制器,ECU数量下降到100个
- 不同的域控制器负责不同的域:
- 底盘域:通过FlexRay连接底盘系统的其他ECU
- 混动域:发动机管理和变速箱控制,以及通过CAN连接的电池管理、充电、电机控制
- 娱乐域:触摸屏,包括视频、音频等
- 车身域:
- 通过LIN连接:开关和智能执行器,如车窗、挡风玻璃、雨刷的电机,无需太多线束
- 通过CAN连接:车门ECU等
- 域控制器通过线束连接到传感器、执行器和其他ECU
- 非常现代的ECU架构图:
![]()
- 2020或如今:将面向服务的通信 SOA 引入域控制器
- 继而引入运行AUTOSAR AP的HCP
- 域控制器和其他ECU运行AUTOSAR CP
- HCP和ECU协同工作:
- 域控制器连接 面向信号的世界(CAN/LIN/FlexRay)和面向服务的世界(AUTOSAR AP)
- HCP实现例如离线预测车轮侧滑的反应系统
- 预测本车,并通过后台计算机共享给其他汽车
![]()
- 预测本车,并通过后台计算机共享给其他汽车
- 展望:到2020s中期
- 线束过多、硬件限制导致的功能变更困难等
- 解决方案:将车辆划分为若干拓扑区域
- 配备区域控制器,并通过总线连接IO(输入/输出)和少量ECU
- 交换机放在HCP中
- ECU(专用硬件)用于完成特定任务
- 车辆前后、或每个车轮都有电机控制器(M1/M2)
- IO节点:采集数据和执行输出
- 节约大量线束,提高灵活性
- 更多的通用硬件:标准化/商品化硬件
- 用于HCP/区域控制器/IO节点
- 加速了SDV(软件定义汽车)的发展
- CAN依然存在:CAN XL, 10M/s,更快,传输更长的帧
- 与以太网有一争之力
![]()
- 与以太网有一争之力
- 展望:到2020s后期 SDV
- 一旦建立可靠的data-link来连接离线计算资源
- 汽车或成为 物联网(IoT) 的一部分
- 之后,越来越多的功能可能会放到云端执行
- 如果通过数据链接来连接灵活的离线计算与通用硬件:
- 通用机载硬件:HCP/区域控制器/IO节点
- 而不是由专用硬件(如ECU) 提供固定功能
- 有望:实现SDV-软件定义汽车
- 意味着:汽车的功能可以在汽车生产之后继续变化和发展
- 一旦建立可靠的data-link来连接离线计算资源
- 小结:
- E/E系统变得越来越软件化
- 变化越来越明显
- 汽车网络正在推动这一发展,尤其是汽车以太网
- 解锁了很多新能力让汽车以全新的方式运行
- 未来的汽车可能和如今的截然不同:
- 等待一个技术爆炸
- 区域控制器、HCP、IO节点:
- 可能从根本上改变汽车的设计、开发、维护方式。
- 汽车制造商OEM和供应商supplier之间的关系也可能完全改变
- 从专用硬件 变为 (基于标准化硬件的)普通商业采购模式
- E/E系统变得越来越软件化





参考链接:
- B站:vector知识充电-合集
- "从零开始的知识拼图"到"汽车E/E系统发展历程2"

 浙公网安备 33010602011771号
浙公网安备 33010602011771号