香橙派上进行 Livox Mid-360 激光雷达开发(一)基本环境配置
基本信息
主机:Orangepi5max 16G (ARM64 架构) + 64G tf卡
系统:Orangepi5max_1.0.0_ubuntu_jammy_desktop_xfce_linux5.10.160(ubuntu 22.04)
系统配置说明:已经使用fishros安装ROS Humble、rosdepc
硬件介绍
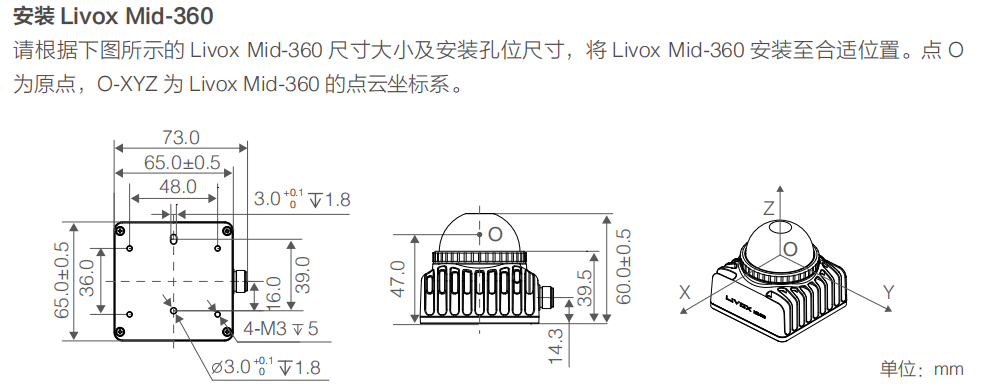
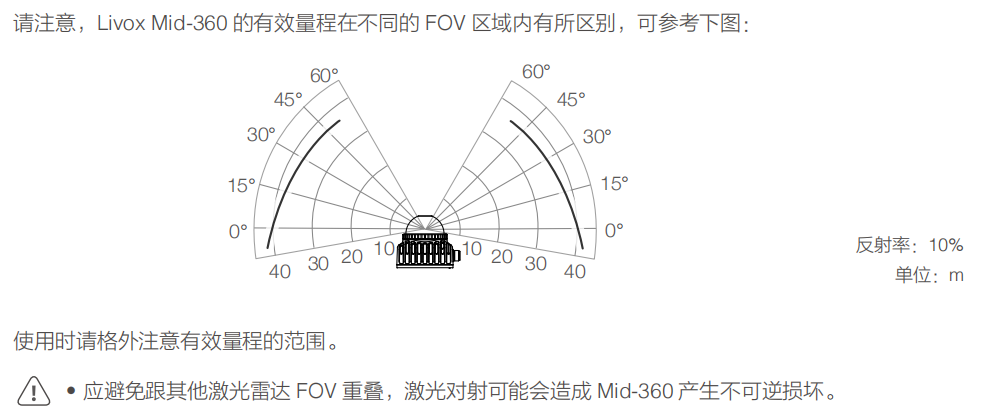
Livox Mid-360 是面向智能移动机器人市场推出的一款3D激光雷达,垂直视场角高达59°,可帮助移动机器人感知更复杂的3D环境,为规划、决策提供更加全面的点云数据。
Livox Mid-360 官网链接 https://www.livoxtech.com/cn/mid-360
驱动安装
一些必要准备
如果存在conda环境,安装时建议退出conda环境
conda deactivate
更新系统
sudo apt update && sudo apt upgrade -y
安装cmake
sudo apt install cmake
安装Livox-SDK2
获取包,如访问超时可以多尝试几次
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
创建构建目录
mkdir build
cd build
编译安装Livox-SDK2,香橙派具备多核多线程能力
cmake .. && make -j4或cmake .. && make -j8
sudo make install
安装livox_ros_driver2
可以参考 https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
打开一个新的terminal
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
构建livox_ros_driver2
cd ~/ws_livox/
source /opt/ros/humble/setup.sh
cd ~/ws_livox/src/livox_ros_driver2/
./build.sh humble
修改config文件
更改路径 ~/ws_livox/src/livox_ros_driver2/config 下的MID360_config.json 和 ~/ws_livox/install/livox_ros_driver2/share/livox_ros_driver2/config下的MID360_config.json
将Line14、16、18、20的ip改为192.168.1.50
将Line28的ip改为 192.168.1.1xx(xx为雷达S/N码的后两位)
以太网配置
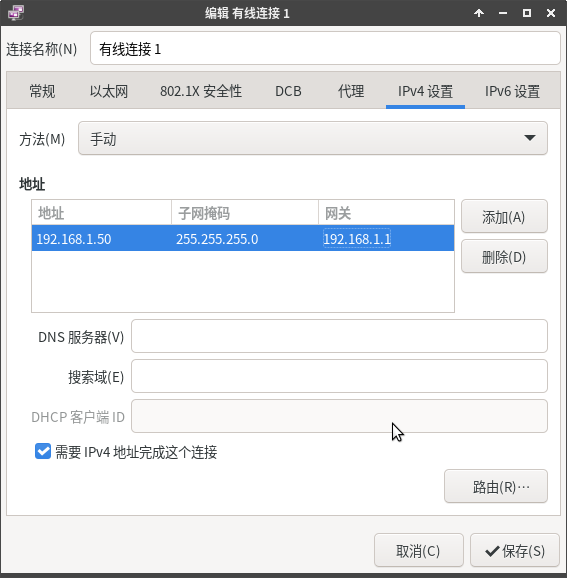
点击右上角网络图标,下拉菜单,“编辑连接”,双击“有线连接1”进入如下界面并按照此参数配置
运行
1 连接网线
2 雷达上电
3 运行程序
cd ~/ws_livox/
source ./install/setup.bash
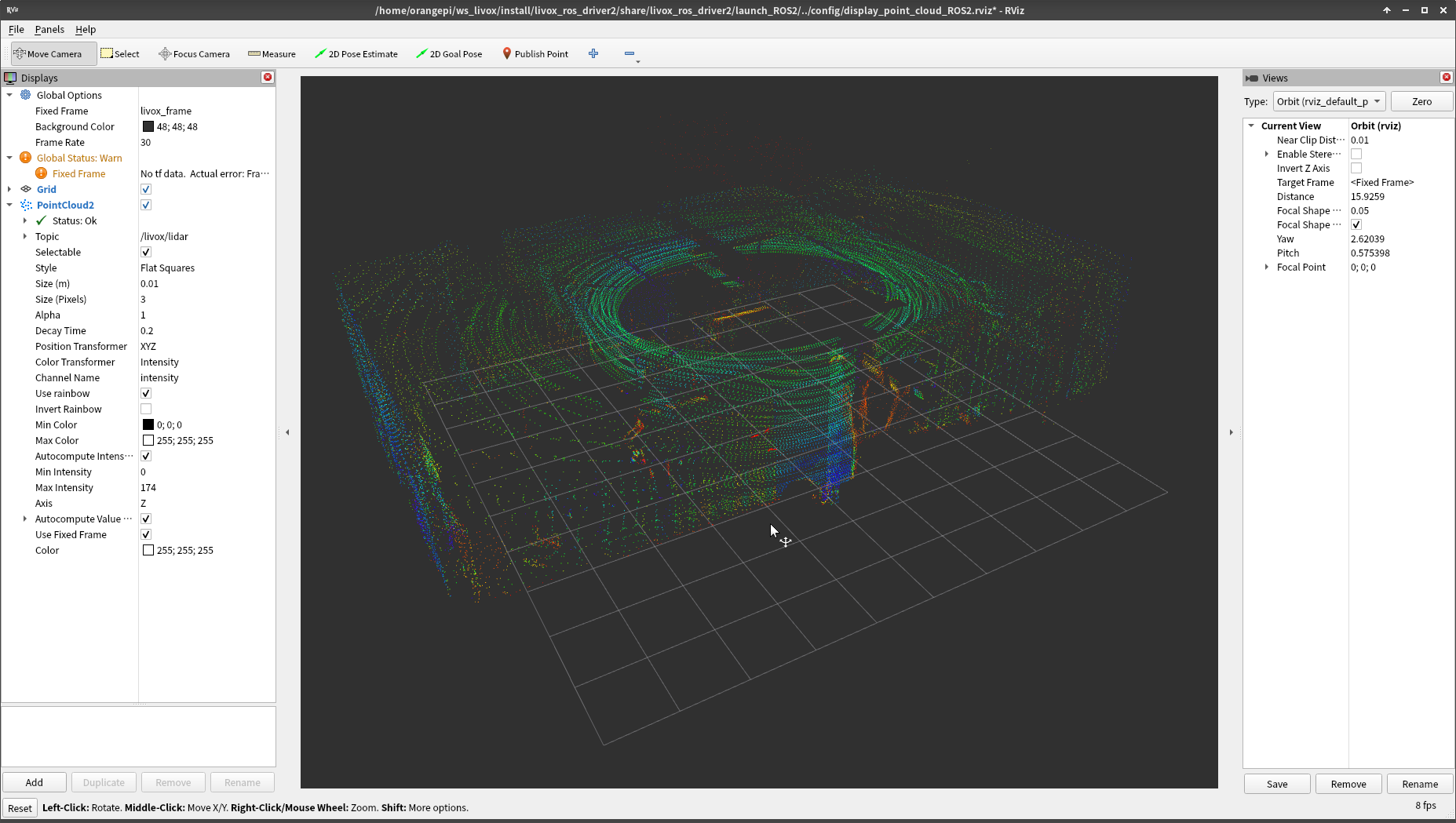
ros2 launch livox_ros_driver2 rviz_MID360_launch.py
运行成功后rviz中显示点云数据


 浙公网安备 33010602011771号
浙公网安备 33010602011771号