
PCL配准——粗配准+ICP
由于ICP本身属于精配准方法,在PCL文档中也只给出了简单的使用方式。在此,我结合自己的了解稍微拓展。对于一个点云数据我们先执行粗配准,然后再通过ICP进行精配准。
算法流程
粗配准(SAC-IA)
通过特征点先计算一个大概的初值,帮助ICP收敛到一个更准确的位置。总体流程是 空间均匀采样 → 特征匹配 → RANSAC 评估刚性变换。,PCL中可以使用SAC-IA 算法来完成上面的粗配准流程。该算法流程如下:
- 采样与特征计算
从待配准点云中按最小距离约束选取空间上分散的采样点,并为这些采样点计算 FPFH 等局部几何特征,以保证特征具有区分性。 - 特征匹配建立候选对应
根据采样点的 FPFH 特征,在目标点云中查找特征相似的点,形成源点云与目标点云之间的候选对应点对集合,其中包含大量错误匹配。 - RANSAC 估计初始刚性变换
通过 RANSAC 从候选对应点对中随机采样最小点集,估计刚性变换,并以变换后点对的距离误差作为一致性评价标准,选择支持度最高的变换作为粗配准结果。
精配准
精配准算法在PCL的教程文档里介绍了两个,一个是ICP还有一个是NDT。
ICP
ICP算法假定我们当前已经有一个较为合理的初始位姿。算法在此基础上通过最小二乘法进一步实现更精确的配准。
- 建立对应关系
对源点云中每个点,在目标点云中通过 最近邻搜索(KD-Tree) 找到对应点,并剔除距离过大的对应。 - 估计刚体变换
基于当前对应点对,采用 最小二乘法(SVD / 点到平面) 计算最优的旋转矩阵 𝑅和平移向量𝑡。 - 更新并迭代
将变换应用到源点云,重复步骤 1–2,直到变换收敛或达到最大迭代次数。
PCL中的ICP算法 如果不指定初始变换矩阵,默认为单位矩阵。
实验
这里我们使用兔子点云,按照上面的流程完整的走一遍粗配准+精配准的流程。
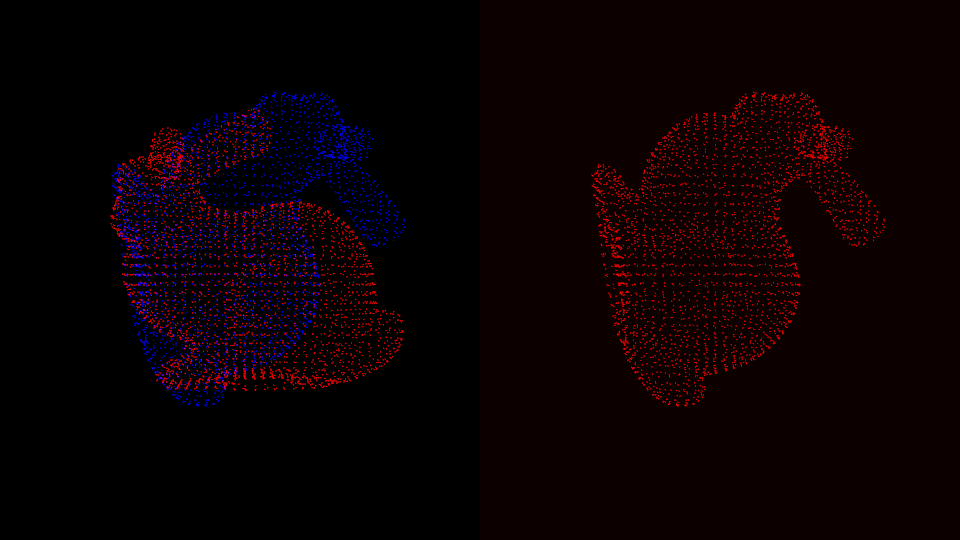
- 首先对点云进行采样。
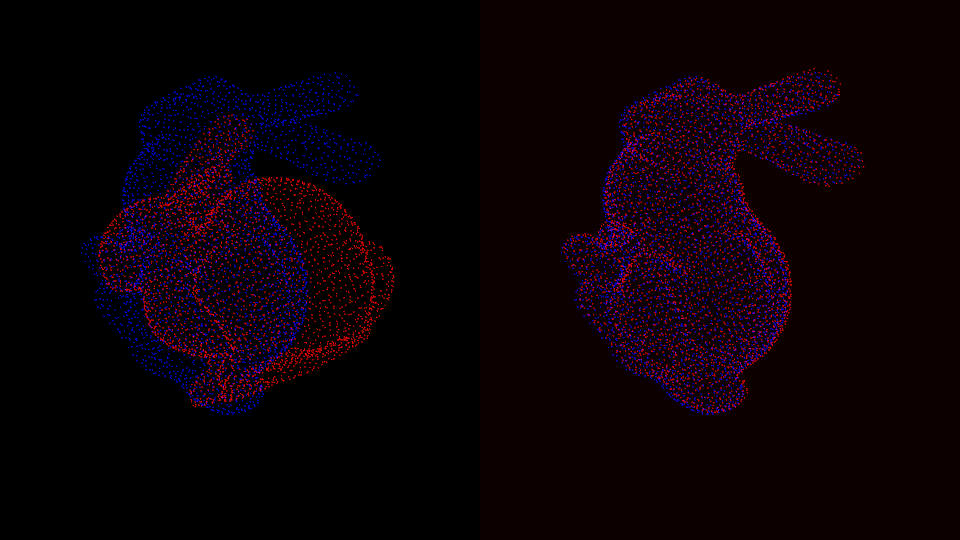
- 然后计算特征并进行粗配准
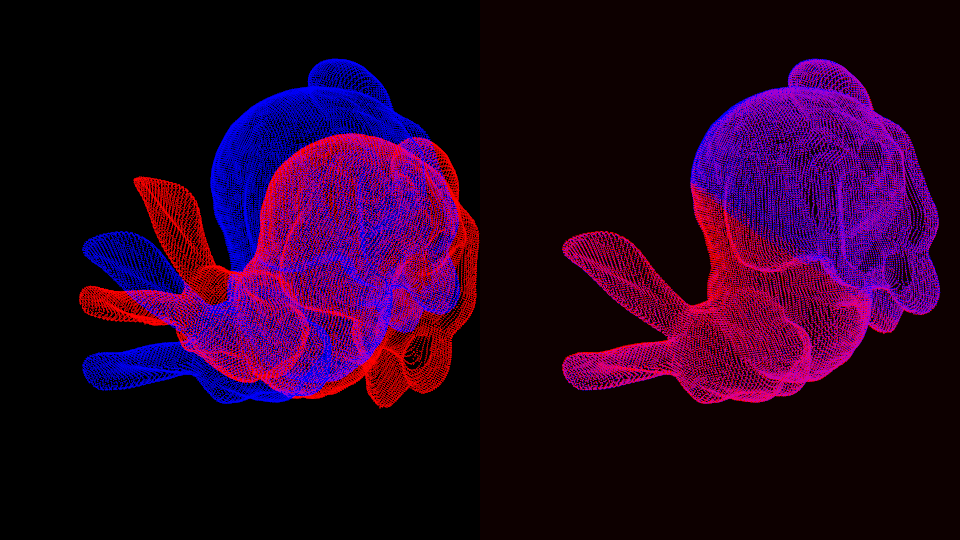
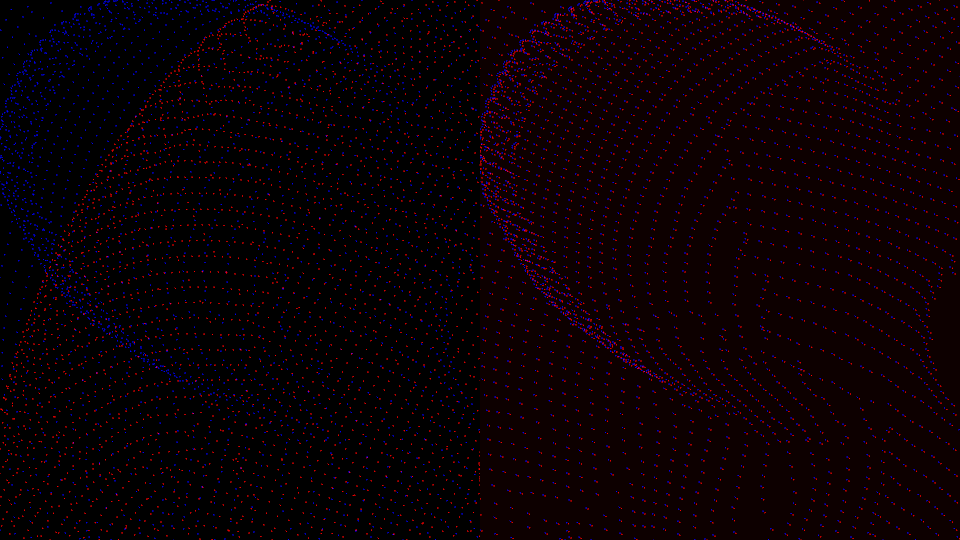
- 根据粗配准结果,使用ICP再次配准。此外,可以考虑使用带法线版本的ICP,因为这里的变换还涉及到了旋转。匹配效果非常好,由于点高度重合导致显示的颜色也已经发生改变了。我们没有设置其他的参数,直接使用默认参数。
完整代码
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <corecrt_io.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/surface/on_nurbs/fitting_surface_tdm.h>
#include <pcl/surface/on_nurbs/fitting_curve_2d_asdm.h>
#include <pcl/surface/on_nurbs/triangulation.h>
#include <pcl/registration/icp.h>
#include <pcl/registration/ia_ransac.h>
#include <boost/thread/thread.hpp>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/fpfh_omp.h>
#include <pcl/filters/uniform_sampling.h>
void filterCloud(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, pcl::PointCloud<pcl::PointXYZ>::Ptr filteredCloud)
{
pcl::UniformSampling<pcl::PointXYZ> us;
us.setInputCloud(cloud);
us.setNegative(false);
us.setRadiusSearch(0.5f);
us.filter(*filteredCloud);
}
void calCulateDescor(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, pcl::PointCloud<pcl::FPFHSignature33>::Ptr fpfh)
{
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
pcl::PointCloud<pcl::Normal>::Ptr cloudWithNormal(new pcl::PointCloud<pcl::Normal>());
tree->setInputCloud(cloud);
pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> ne;
ne.setNumberOfThreads(4);
ne.setInputCloud(cloud);
ne.setSearchMethod(tree);
ne.setKSearch(10);
ne.compute(*cloudWithNormal);
//ne.setViewPoint
//计算特征
pcl::FPFHEstimationOMP<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fe;
fe.setInputCloud(cloud); // 设置法向量
fe.setSearchMethod(tree); // 使用KD树加速搜索
fe.setKSearch(10); // 设置K近邻点数量为10
fe.setInputNormals(cloudWithNormal);
fe.setNumberOfThreads(4);
fe.compute(*fpfh);
}
// 点云可视化函数
void visualizePointCloudsRegistration(pcl::PointCloud<pcl::PointXYZ>::Ptr source, pcl::PointCloud<pcl::PointXYZ>::Ptr target,
pcl::PointCloud<pcl::PointXYZ>::Ptr icp_cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("Registration Result"));
int v1 = 0, v2 = 1;
viewer->createViewPort(0, 0, 0.5, 1, v1); // 创建左视口
viewer->createViewPort(0.5, 0, 1, 1, v2); // 创建右视口
viewer->setBackgroundColor(0, 0, 0, v1); // 设置背景颜色
viewer->setBackgroundColor(0.05, 0, 0, v2);
// 设置点云的颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> src_h(source, 255, 0, 0); // 源点云颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> tgt_h(target, 0, 0, 255); // 目标点云颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> transe(icp_cloud, 255, 0, 0); // 配准后的点云颜色
viewer->addPointCloud(source, src_h, "source cloud", v1); // 添加源点云
viewer->addPointCloud(target, tgt_h, "target cloud", v1); // 添加目标点云
viewer->addPointCloud(target, tgt_h, "target cloud1", v2); // 目标点云
viewer->addPointCloud(icp_cloud, transe, "pcs cloud", v2); // 添加配准后的点云
// 启动可视化窗口
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(10000));
}
}
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr source(new pcl::PointCloud<pcl::PointXYZ>()),
source_filtered(new pcl::PointCloud<pcl::PointXYZ>()),
target(new pcl::PointCloud<pcl::PointXYZ>()),
target_filtered(new pcl::PointCloud<pcl::PointXYZ>()),
aligned_cloud(new pcl::PointCloud<pcl::PointXYZ>()),
final_cloud(new pcl::PointCloud<pcl::PointXYZ>());
pcl::PointCloud<pcl::PointXYZ>::Ptr coraseCloud(new pcl::PointCloud<pcl::PointXYZ>());
if (pcl::io::loadPCDFile("./rabbit.pcd", *source) != 0)
{
std::cout << "文件读取失败" << std::endl;
}
Eigen::Affine3f trans = Eigen::Affine3f::Identity();
trans.translation() << 0.1, 2, 1;
trans.rotate(Eigen::AngleAxisf(30.0f * M_PI / 180.0f, Eigen::Vector3f::UnitZ()));
pcl::transformPointCloud(*source, *target, trans);
//visualizePointCloudsRegistration(source, target, target);
//滤波
filterCloud(source, source_filtered);
filterCloud(target, target_filtered);
visualizePointCloudsRegistration(source_filtered, target_filtered, target_filtered);
//
////分别计算特征
pcl::PointCloud<pcl::FPFHSignature33>::Ptr fpfh_source(new pcl::PointCloud<pcl::FPFHSignature33>);
pcl::PointCloud<pcl::FPFHSignature33>::Ptr fpfh_target(new pcl::PointCloud<pcl::FPFHSignature33>);
calCulateDescor(source_filtered, fpfh_source);
calCulateDescor(target_filtered, fpfh_target);
std::cout << "特征计算完成" << std::endl;
//
////进行粗匹配
pcl::SampleConsensusInitialAlignment<pcl::PointXYZ, pcl::PointXYZ, pcl::FPFHSignature33> sa;
sa.setInputSource(source_filtered);
sa.setSourceFeatures(fpfh_source);
sa.setInputTarget(target_filtered);
sa.setTargetFeatures(fpfh_target);
sa.setMinSampleDistance(0.1); // 设置样本点之间的最小距离
sa.setCorrespondenceRandomness(6);
sa.align(*aligned_cloud);
//显示粗匹配结果
visualizePointCloudsRegistration(source_filtered, target_filtered, aligned_cloud);
//ICP
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
icp.setInputSource(source_filtered);
icp.setInputTarget(target_filtered);
icp.align(*final_cloud, sa.getFinalTransformation());
//最终结果
//我们用的是采样的点 但实际上 变换的是最初的点云
pcl::transformPointCloud(*source, *final_cloud, icp.getFinalTransformation());
visualizePointCloudsRegistration(source, target, final_cloud);
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号