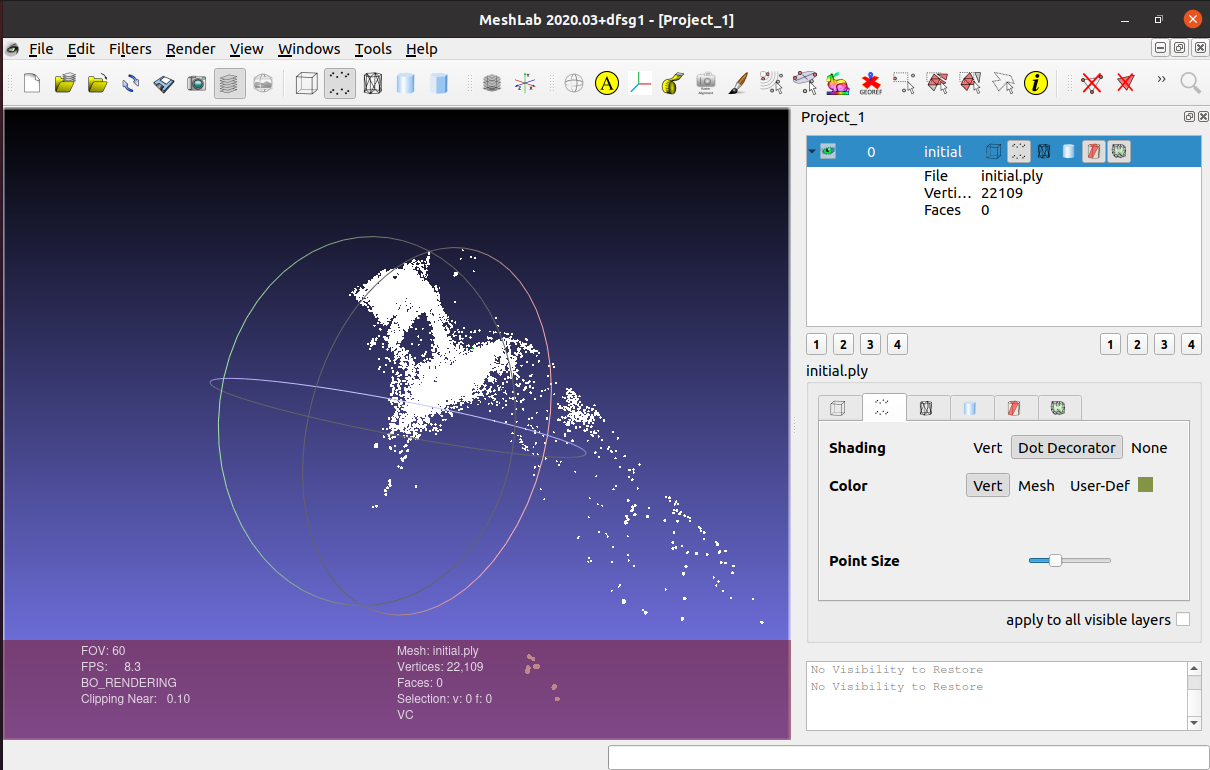
解决SLAM14讲第九节initial.ply不能显示的问题
meshlab只显示绿色的摄像机点,不显示正常3D点
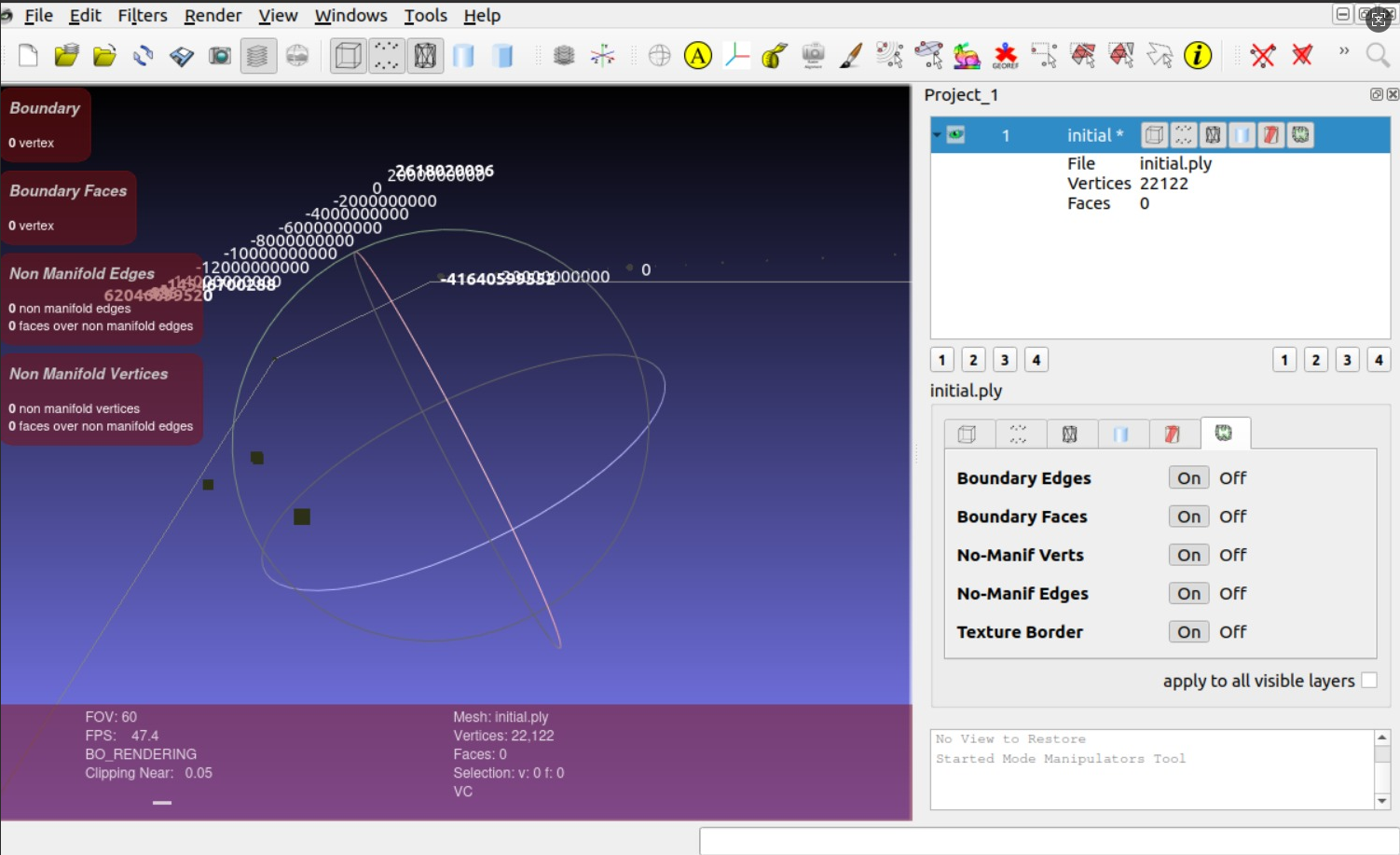
解决思路:给ply中绿色的摄像机点和白色的普通点都加上坐标数值异常过滤
极大 / 极小的数值,这说明部分地图点的 3D 坐标是无效值(比如 NaN、inf 或者计算溢出的错误值),导致 MeshLab 显示出了异常的坐标刻度。
点击查看代码
void BALProblem::WriteToPLYFile(const std::string& filename) const
{
//打开输出文件(C++风格)
std::ofstream of(filename.c_str());
if (!of.is_open())//关键:判断文件是否成功打开
{
std::cerr<<"错误:无法打开文件"<<filename<<
".无法写入PLY数据!"<<std::endl;
}
//写入PLY头文件
of<<"ply"
<<'\n'<<"format ascii 1.0"
<<'\n'<<"element vertex "<<num_cameras_+num_points_// 顶点总数(相机+点)
<<'\n'<<"property float x" //X坐标
<<'\n'<<"property float y" //Y坐标
<<'\n'<<"property float z"//Z坐标
<<'\n'<<"property uchar red"//红色通道
<<'\n'<<"property uchar green"//绿色通道
<<'\n'<<"property uchar blue"//蓝色通道
<<'\n'<<"end_header"<<std::endl;
int validcount=0;
//导出相机中心(绿色点)
double angle_axis[3];//存储角轴旋转
double center[3];//存储相机中心
for (int i=0;i<num_cameras();++i)
{
//获取第i个相机的参数指针
const double *camera=cameras()+camera_block_size()*i;
//将相机参数转换为角轴旋转和相机中心
CameraToAngelAxisAndCenter(camera,angle_axis,center);
if (std::isnan(center[0]) || std::isnan(center[1]) || std::isnan(center[2])) continue;
if (std::isinf(center[0]) || std::isinf(center[1]) || std::isinf(center[2])) continue;
if (abs(center[0]) > 1000 || abs(center[1]) > 1000 || abs(center[2]) > 1000) continue; // 过滤过远点
//写入相机中心坐标和绿色
of<<center[0]<<' '<<center[1]<<' '<<center[2]
<<" 0 255 0"<<'\n';//前面加一个空格,保持格式统一,避免连写
validcount+=1;
}
//导出3D点(白色点:255,255,255)
const double *points=parameters_+camera_block_size()*num_cameras_;
for (int i=0;i<num_points();++i)
{
const double *point=points+i*point_block_size();
if (fabs(point[0]>1e5)||fabs(point[1]>1e5)||fabs(point[2]>1e5))
{
continue;//跳过超大坐标点
}
if (std::isnan(point[0])||std::isinf(point[0])||
std::isnan(point[1])||std::isinf(point[1])||
std::isnan(point[2])||std::isinf(point[2])
)
{
continue;//跳过无效值
}
validcount+=1;
//写入3D点坐标
for (int j=0;j<point_block_size();++j)
{
of<<point[j]<<' ';
}
//写入白色
of<<" 255 255 255\n";
}
//关键:刷新缓冲区,确保所有数据写入磁盘
of.flush();
//关闭文件流
of.close();
//可选:添加写入成功提示
std::cout<<"validcount:"<<validcount<<std::endl;
std::cout<<"PLY文件写入成功: "<<filename<<std::endl;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号